线控性能比拼,MKZ与CRV作为自动驾驶开发平台的全面测评
全球自动驾驶创业公司最主流的测试开发用车是林肯MKZ,这是因为其高性能高精度的线控能力表现,易于使用逆向工程实现改装,以及存在成熟的线控改造服务提供商AS和Dataspeed,共同为自动驾驶初创及辅助驾驶研发提供了稳定易用的开发平台。

但MKZ同样也存在问题,如车价和改装成本较高,并且现车在中国一车难求。
那我们是否有可能找到一个与线控改装MKZ性能匹敌,并且成本更低的线控改装乘用车解决方案,以降低整个行业,包括自动驾驶初创,研究机构,高校等的进入门槛,来促进自动驾驶的发展和落地呢?
在改装并测试了MKZ与其他若干乘用车改装平台,如北汽,本田Civic等后,我们通过实测及路测对比,本田CRV最终脱颖而出。

来看两车的综合线控性能及数据的对比:
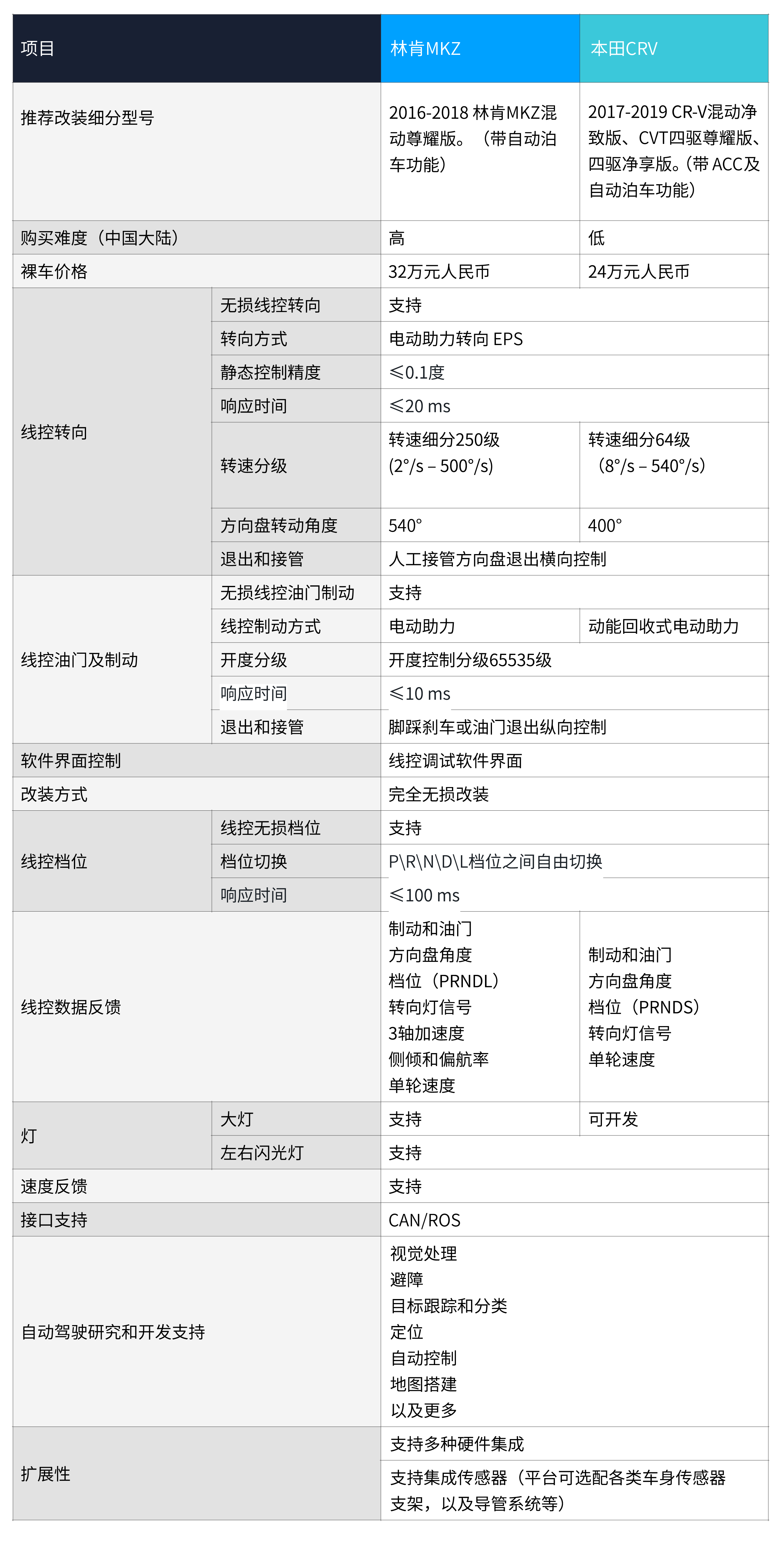
综上,除了转向控制和制动控制指标稍有不同外,两车其余的线控性能指标无明显差异。在转向控制方面,MKZ转向平滑度更优,CRV响应速度更快。

在制动控制方面,CRV和MKZ的底层控制逻辑不同,CRV具备的动能回收和机械制动力互补的控制方式,使制动更加平顺稳定。

过去一年多中,基于我们改装的自动驾驶乘用车,我们组织了7次自动驾驶黑客马拉松,自动驾驶实训营及自动驾驶挑战赛,总共吸引了近200名来自全球20个国家爱的专业工程师来到现场学习,测试及比拼他们的算法。我们也在一线了解到开发者的确需要成本相对更低,且易用、稳定和强大的线控开发平台。




另外,这些平台也为我们自身的自动驾驶开发提供了核心的支持,积累了大量的测试历程和客户体验,其中线控CRV已为上万名普通市民提供了自动驾驶试乘体验。

我们希望可以推动自动驾驶产业的发展,这是一个令人激动的产业,将大大的促进城市文明的发展甚至变革,改善生活。
因此,我们也已经骄傲的为多个自动驾驶初创公司客户提供了较低成本CRV的线控改装套件或整车改装服务,以及自动驾驶通用底盘,同时建立线上的自动驾驶开发者社区,组织更多的自动驾驶黑客马拉松,使这个生态的玩家更加丰富多元,降低他们的进入门槛,去中心化的进化生长。
我们是PIX,一家base在硅谷和中国的robo-vehicle初创公司,致力于通过自动驾驶重塑未来城市。欢迎与我们建立各种有趣的合作。

最新文章
- python的正则表达式
- App.xaml
- Ubuntu下Eclipse中文乱码问题解决(转)
- CSLight研究院之学习笔记结合NGUI(一)
- Xtrabackup之innobackupex备份恢复详解(转)
- Linux 网络编程: xinetd time
- DC游戏《斑鸠》原创赏析[转载]
- 解决sqlite删除数据后,文件大小不变问题(VACUUM)
- 今天才知道mysql
- C#游戏框架uFrame
- UE4读取本地XML文件
- [二十六]JavaIO之再回首恍然(如梦? 大悟?)
- 零基础学Python--------第5章 字符串及正则表达式
- linux的基本操作概览
- day9 集合操作
- 通过webbrowser控件获取验证码
- react.js 教程之 Installation 安装
- 仿QQ撒花特效--第三方开源--FllowerAnimation
- jmeter-集合点---学习笔记
- 洛谷P4017 最大食物链计数