【线性判别】Fisher线性判别(转)
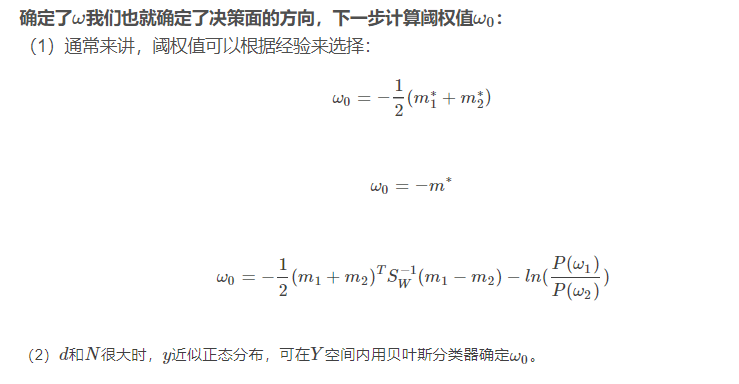
今天读paper遇到了Fisher线性判别的变体, 所以来学习一下, 所以到时候一定要把PRMl刷一遍呀
以下两篇论文一起阅读比较好:
论文1: https://blog.csdn.net/Rainbow0210/article/details/52892805
在前文《贝叶斯决策理论》中已经提到,很多情况下,准确地估计概率密度模型并非易事,在特征空间维数较高和样本数量较少的情况下尤为如此。
实际上,模式识别的目的是在特征空间中设法找到两类(或多类)的分类面,估计概率密度函数并不是我们的目的。
前文已经提到,正态分布情况下,贝叶斯决策的最优分类面是线性的或者是二次函数形式的,本文则着重讨论线性情况下的一类判别准则——Fisher判别准则。
为了避免陷入复杂的概率的计算,我们直接估计判别函数式中的参数(因为我们已经知道判别函数式是线性的)。
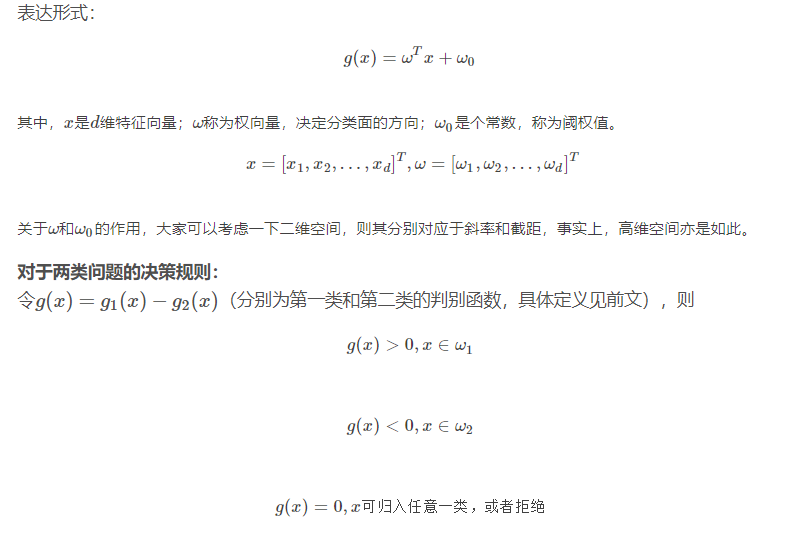
首先我们来回顾一下线性判别函数的基本概念:


第二篇: https://blog.csdn.net/qq_18870127/article/details/79097735
应用统计方法解决模式识别问题时,一再碰到的问题之一就是维数问题。在低维空间里解析上或计算上行得通的方法,在高维空间里往往行不通。因此,降低维数有时就会成为处理实际问题的关键。
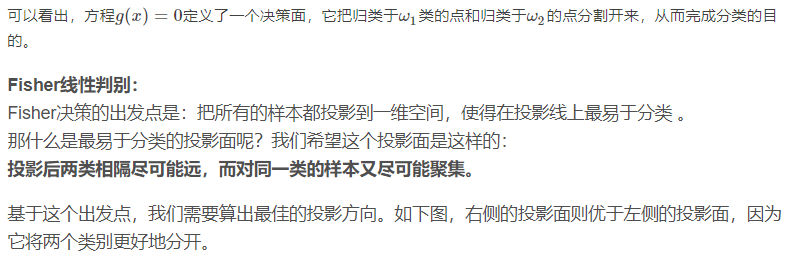
问题描述:如何根据实际情况找到一条最好的、最易于分类的投影线,这就是Fisher判别方法所要解决的基本问题。
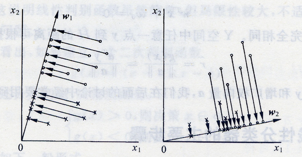
考虑把d维空间的样本投影到一条直线上,形成一维空间,即把维数压缩到一维。然而,即使样本在d维空间里形成若干紧凑的互相分得开的集群,当把它们投影到一条直线上时,也可能会是几类样本混在一起而变得无法识别。但是,在一般情况下,总可以找到某个方向,使在这个方向的直线上,样本的投影能分得开。下图可能会更加直观一点:
从d维空间到一维空间的一般数学变换方法:假设有一集合Г包含N个d维样本x1, x2, …, xN,其中N1个属于ω1类的样本记为子集Г1, N2个属于ω2类的样本记为子集Г2 。若对xn的分量做线性组合可得标量:
yn = wTxn, n=1,2,…,N
这样便得到N个一维样本yn组成的集合,并可分为两个子集Г1’和Г2’ 。
实际上,w的值是无关紧要的,它仅是yn乘上一个比例因子,重要的是选择w的方向。w的方向不同,将使样本投影后的可分离程度不同,从而直接影响的分类效果。因此,上述寻找最佳投影方向的问题,在数学上就是寻找最好的变换向量w*的问题。
Fisher准则函数的定义
几个必要的基本参量:
1.
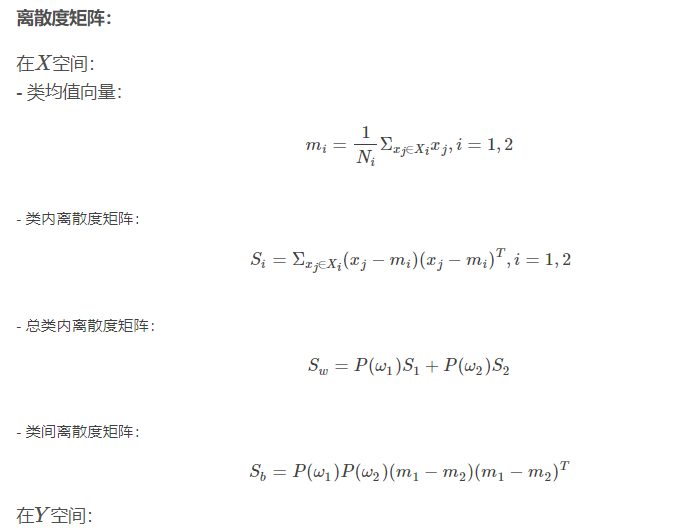
在d维X空间
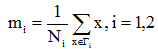
(1)各类样本的均值向量mi
(2)样本类内离散度矩阵Si和总样本类内离散度矩阵Sw
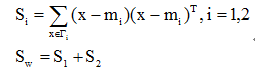
其中Sw是对称半正定矩阵,而且当N>d时通常是非奇异的。(半正定矩阵:特征值都不小于零的实对称矩阵;非奇异矩阵:矩阵的行列式不为零)
(3)样本类间离散度矩阵Sb

Sb是对称半正定矩阵。
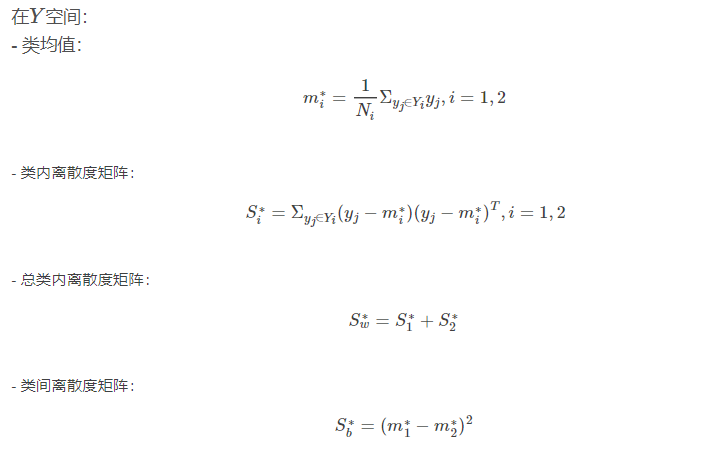
2. 在一维Y空间
(1)各类样本的均值
(2)样本类内离散度 和总样本类内离散度
我们希望投影后,在一维Y空间中各类样本尽可能分得开些,即希望两类均值之差越大越好,同时希望各类样本内部尽量密集,即希望类内离散度越小越好。
Fisher准则函数定义
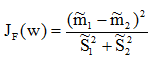
 是两类均值之差,
是两类均值之差, 是样本类内离散度。显然,应该使JF(w)的分子尽可能大而分母尽可能小,即应寻找使JF(w)尽可能大的w作为投影方向。但上式中并不显含w,因此须设法将JF(w)变成w的显函数。
是样本类内离散度。显然,应该使JF(w)的分子尽可能大而分母尽可能小,即应寻找使JF(w)尽可能大的w作为投影方向。但上式中并不显含w,因此须设法将JF(w)变成w的显函数。由各类样本的均值可推出:

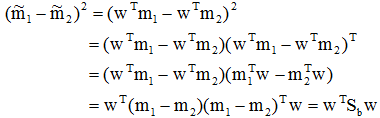
这样,Fisher准则函数JF(w)的分子可写成:
现在再来考察JF(w)的分母与w的关系:
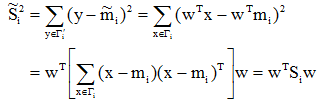
因此,

将上述各式代入JF(w),可得:
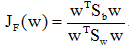
其中Sb为样本类间离散度矩阵,Sw为总样本类内离散度矩阵。
最佳变换向量w的求取
为求使
定义Lagrange函数为:

其中λ为Lagrange乘子。将上式对w求偏导数,可得:
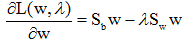
令偏导数为零,有;

即
其中w就是JF(w)的极值解。因为Sw非奇异,将上式两边左乘 上式为求一般矩阵 其中








从而可得:
由于我们的目的是寻找最佳的投影方向,w的比例因子对此并无影响,因此可忽略比例因子R/λ,有: w

最新文章
- htnl中的遮罩层以及定位方式
- android 开源和一些博客总结
- SQL 不同的数据类型
- 统计 iOS 设备锁定、解锁次数-b
- maven项目在tomcat中运行遇到的问题
- .net 操作excel
- 解决python logging重复写日志问题
- SAP MM 物料主数据MRP2 视图’Minimum Lot Size’字段
- docker环境搭建
- 莫烦theano学习自修第九天【过拟合问题与正规化】
- rsync 守护进程备份报错
- 【手记】.net正则行尾匹配符$的问题
- Centos下安装破解confluence6.3的操作记录
- Spring Boot 启动载入数据 CommandLineRunner
- Datetimepicker.js用法
- CPU的寄存器结构
- 20155204 2016-2017-2 《Java程序设计》第3周学习总结
- HDU 5875 Function 大连网络赛 线段树
- sql 自定义函数返回中文,数字,英文
- 并查集(Union/Find)模板及详解