Matlab2015 双目相机自动标定
标定步骤
调出标定工具箱
在命令行输入stereoCameraCalibrator,出现如下界面:
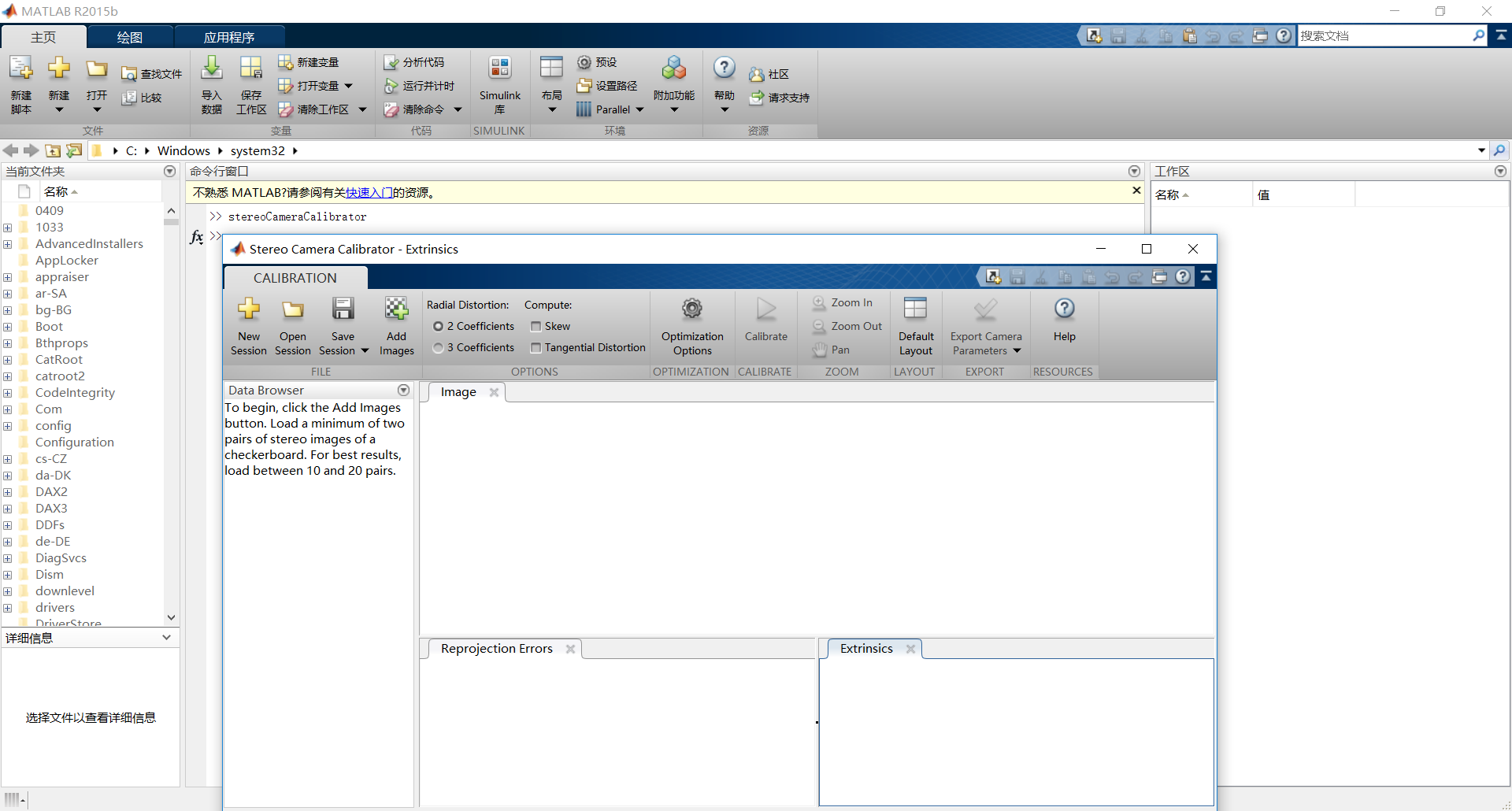
勾选相应的选项
然后将上面的“Skew”、“Tangential Distortion”以及“3 Coefficients”等选项选上,将“2 Coefficients”选项去掉,如下:

载入图像
然后点击添加图像,出现如下界面:

Camera1代表左摄像头,Camera2代表右摄像头,分别选择存放着左右图像的文件夹,需要特别注意的是棋盘格的边长应该根据打印的实际大小填写,单位可以选择
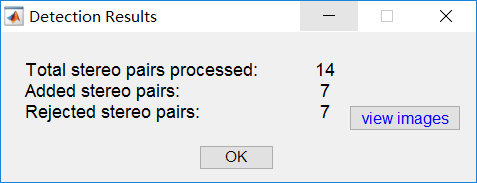
然后点击OK,程序会自动检测采集的图像到底有多少可以使用,可以说MATLAB2015的这个工具十分挑剔,如果角度不好的话,将使用不了,因此在采集图像时,最好多的采集一些。(此处只是为了说明标定步骤,所以使用的图像较少)。
标定
点击 按钮,开始标定:
按钮,开始标定:

校准
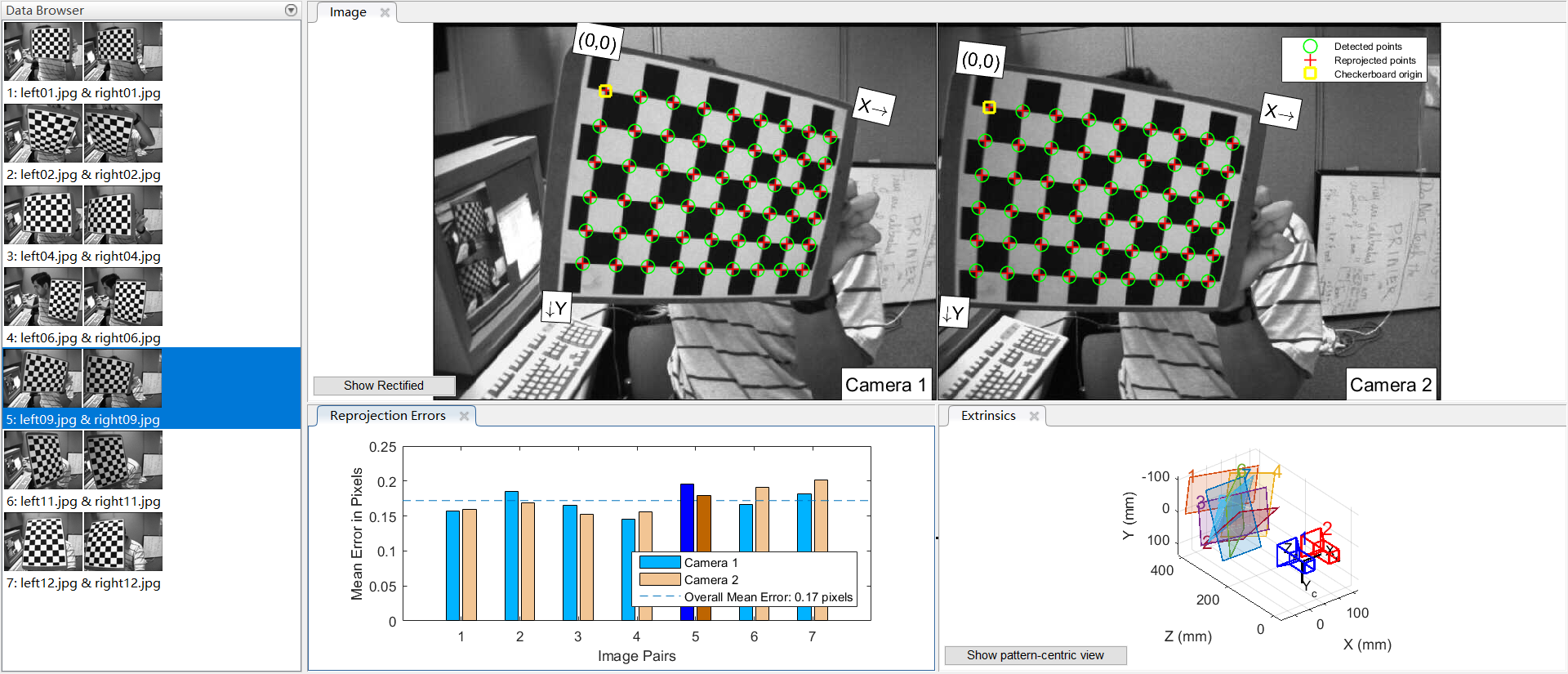
从下图可以看到,平均的标定误差以及标定过程中误差较大的的图像对。
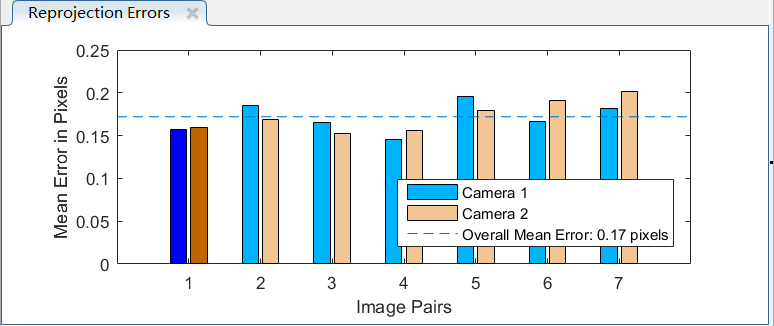
点击选择不想接受的误差直方图,可以直接在左边的图像对中找到对应的图像,右键选择“Remove and Recalibrate”:
可以重复上述步骤,直到认为误差满足标定需求为止。
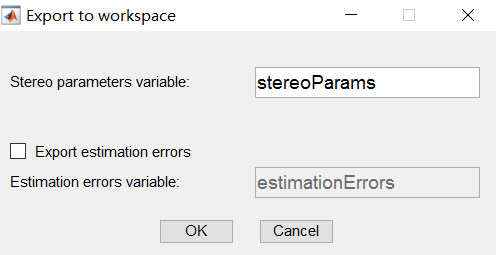
导出参数
点击 选择Export camera parameters, 并点击“OK”。
选择Export camera parameters, 并点击“OK”。
参数读取
标定结束后,会得到如下标定参数:

CameraParameters1与CameraParameters2为左右摄像头的单独标定参数。
两个摄像头的平移和旋转参数
stereoParams.TranslationOfCamera2:相机2相对于相机1的偏移矩阵,可以直接使用。
stereoParams.RotationOfCamera2:相机2相对于相机1的旋转矩阵,需要转置之后才能使用。
摄像机内参矩阵
CameraParameters1与CameraParameters2中包含如下文件:
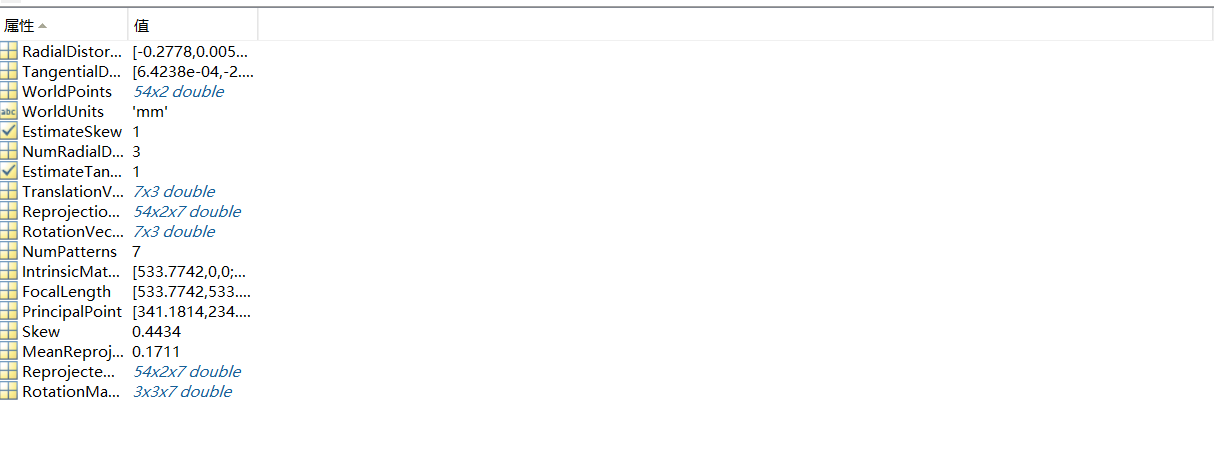
IntrinsicMatrix存放的是摄像头的内参,只与摄像机的内部结构有关,需要先转置再使用。
畸变参数
RadialDistortion:径向畸变,摄像头由于光学透镜的特性使得成像存在着径向畸变,可由K1,K2,K3确定。
TangentialDistortion:切向畸变,由于装配方面的误差,传感器与光学镜头之间并非完全平行,因此成像存在切向畸变,可由两个参数P1,P2确定。
使用时,需要注意参数的排放顺序,即K1,K2,P1,P2,K3。切记不可弄错,否则后续的立体匹配会出现很大的偏差。
最新文章
- axios基本用法
- Redis集群最佳实践
- POJ2699 The Maximum Number of Strong Kings(最大流)
- ASP.NET MVC+Bootstrap个人博客之修复UEditor编辑时Bug(四)
- 移动端 设置 小于12px 字体 初探
- 【运维监控】四款云服务监控工具介绍:Nagios 、 ganglia、zabbix、onealert
- [Apio2010] 巡逻
- Linux--缺页中断和交换技术
- JDBC连接Oracle错误ORA-00922: 选项缺失或无效
- Go 初体验 - 闭包的几种情况
- 求$N^N$的首位数字
- linux udp 函数说明
- 设计模式——proxy代理模式
- 使用httputil中ReverseProxy反向代理遇到的坑
- ububuntu配置ip和dns
- Jmeter AbstractJavaSamplerClient 案例
- eclipse开发go语言入门案例
- python-day18--匿名函数
- [hdu5251]矩形面积 旋转卡壳求最小矩形覆盖
- js基本知识4
热门文章
- xcode添加build phase
- json_encode和json_decode和isset和array_key_exists
- Nginx 下配置Laravel 错误404
- Linux awk&sed
- iBase4j前端01_bootstrap-suggest json-server模拟后台数据、bootstrap-suggest环境搭建、开启bootstrap-suggest的post和put请求
- PyGrub
- CMakefile for Cross-Platform Compling - 1
- 原生ajax访问服务器所展现的现象
- JavaEE互联网轻量级框架整合开发(书籍)阅读笔记(2):SSM+Redis概念理解
- PostgreSQL 速查、备忘手册 | PostgreSQL Quick Find and Tutorial