planning algorithms chapter 2
planning algorithms chapter 2 :Discrete Planning
离散可行规划导论
问题定义
在离散规划中,状态是“可数”的,有限的。
离散可行规划:
- 非空状态空间 X
- 对于每个状态 x,存在一个有限的动作空间 U(x)
- 对于每个状态和动作空间,存在状态转移方程,产生一个新的状态
- 一个初始状态 xi
- 一个目标集 Xg
为了方便表达离散可行规划的定义,通常采用有向状态转移图来表示,图上的顶点集合表示状态空间 X,只有当两顶点之间可状态转移时,图上两顶点之间的有向边才存在。初始状态和目标集可以表示为图上特别指定的顶点。
离散规划的例子
- 2D 网格上移动(“迷宫”)
- 魔方拼图
图搜索算法
前向搜索算法
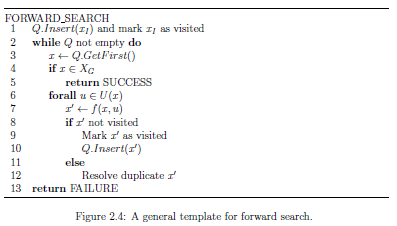
上图显示了通用图搜索算法模板,其中有几点需要注意:Q 内部如何排序,如何判断状态属于目标状态,如何得到计划(动作序列),如何判断该状态是否已经访问过,是否需要更新状态代价值(如在Dijkstra 和 A* 算法)
几种前向搜索算法,区别在于定义了Q 这个优先级队列内部不同的排序方式
- 广度优先:FIFO
- 深度优先:LIFO
- Dijkstra :一种图单源最短路径搜索算法,一种特殊的动态规划形式
在Dijkstra中,图上每条边附带一个代价(l(x, u) >= 0),Q 内部是按照从初始状态到达该状态的累计代价(C(x),cost-to-come)排序。cost-to-come 在搜索过程中通过DP方式来增量计算(C(x‘) = C(x) + l(x, u), 代表最优)。
Dijkstra 可以保证一旦某个状态被访问,则该状态的 cost-to-come一定是最优的。Dijkstra 内部 Q 实现采用的 Fibonacci heap 这种数据结构,可以实现在常数时间内判断某个状态是否被访问过。 - A-star :基于Dijkstra进行扩展,引入启发项值(G(x),cost-to-go),当G(x) = 0 时, A-star 退化成Dijkstra,Q 内部是按照从初始状态到达目标状态的预估最优代价( C(x’) + G(x‘)) 进行排序。
- 最佳优先搜索:Q 内部是按照 cost-to-go 排序,一种贪心搜索,不保证最优,但搜索速度快。
- 迭代加深搜索:通过不断增加深度优先搜索深度的一种搜索,将深度优先搜索转换为一种系统性搜索方式(能够访问可到达的所有状态)。
迭代加深搜索相比 BFS 使用更少的内存,迭代加深搜索结合 A-star 的思想,形成了 IDA* 算法,在每次迭代过程中,最大深度步长为C(x’) + G(x‘)。
其他搜索算法
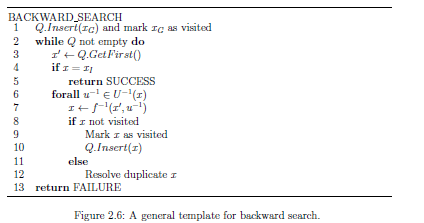
- 反向搜索算法
- 双向搜索算法
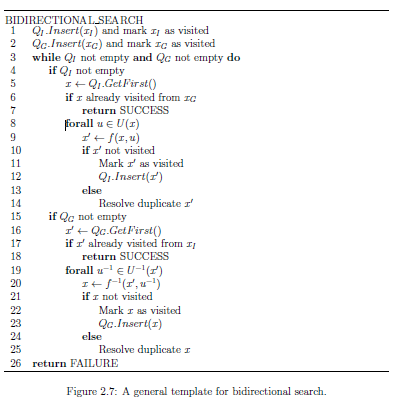
当两棵搜索树相遇时,搜索结束,返回成功。如果其中任一搜索树的优先级队列为空, 且两颗树未相遇,则搜索结束,返回失败。
搜索算法的统一视角
上述所有的搜索算法遵循以下一些共同的模式:
- 初始
搜索开始时,搜索图 G(V,E)中 E为空集,V只包含初始状态 - 选择顶点
从V中选择一个顶点,这通常是通过维护一个优先级队列实现 - 应用动作
基于V中选择的某个顶点,应用动作后,生成一个新的状态 x = f(x0, u) - 向搜索图中插入有向边
新状态 x 如果不在 V 中,则将 x 插入到 V 中 - 检查解决方案
如果只有一颗搜索树,根据搜索图 G 得到从初始状态到目标状态的路径会比较简单。如果搜索树数量大于 1 颗,复杂度会增加。 - 返回到步骤 2
迭代直到找到一个解决方案。
离散最优规划
最优定长规划
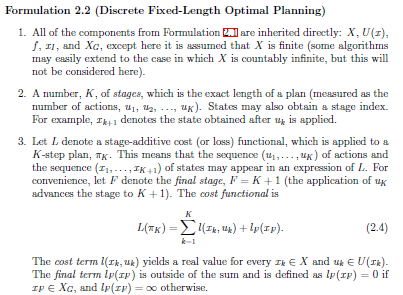
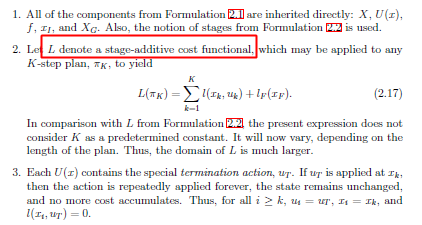
\(L\left ( \pi _{K} \right ) = \sum_{k=1}^{K}l(x_{k},u_{k}) + l_{F}(x_{F})\)
通过引入代价项Lf(xf)这一技巧,将离散可行规划中的约束转换为优化问题代价函数中的一项。
基本思想: 最优规划解决方案的子组成方案也是最优的,于是可以通过动态规划方法解决。在最优定长规划中,采用一种迭代算法,称为 值迭代,它的主要思想是在状态空间中迭代计算最优的 cost-to-go(或 cost-to-come)。Dijkstra’s algorithm 也是 值迭代的一种方式。
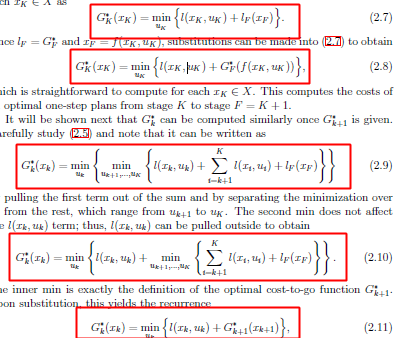
反向值迭代
基本思想: 在状态空间中迭代计算最优的 cost-to-go 代价值。在特殊场景下,该方法退化为 Dijkstra 方法。
符号: $ G_{k}^{ \ast} $ :F 表示最后一步,$ G_{k}^{ \ast} $ 表示从第 k 步到 最后一步(F 步)最佳计划下的累计代价

初始条件: $ G_{F}^{ \ast}\left ( x_{F} \right ) = l_{F}\left ( x_{F} \right ) $
结论:

推导过程:
值迭代过程:
$ G_{F}^{ \ast}\rightarrow G_{K}^{ \ast}\rightarrow G_{K-1}^{ \ast}\cdots G_{k}^{ \ast}\rightarrow G_{k-1}^{ \ast}\rightarrow\cdots G_{2}^{ \ast}\rightarrow G_{1}^{ \ast} $
时间复杂度: $ O\left ( K\left | X \right |\left | U \right | \right ) $
离散最优规划标准定义\(L\left ( \pi _{K} \right ) = \sum_{k=1}^{K}l(x_{k},u_{k}) + l_{F}(x_{F})\),该时间复杂度为 $ O\left | U \right |^K $,通过引入动态规划,极大降低了复杂度。
举例:
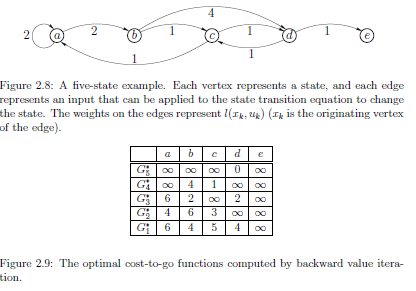
如上图,a 列 $ G_{1}^{ \ast} $ 的值 $G_{1}^{ \ast}\left ( a \right ) $ 代表了 5 步定步长最优规划的累计代价为 6 。那么如何体现动态规划思想降低时间复杂度呢?
当计算 $ G_{4}^{ \ast} $ 的值时,只有 b 和 c 可以只经过 1 步到达 d,再经过1 步到达目标 e,因此只有\(G_{4}^{ \ast}\left ( b \right )\)、\(G_{4}^{ \ast}\left ( c \right )\)为有限值。再计算 \(G_{3}^{ \ast}\) 的值时,只有经过 b 和 c 的路径才可能经过 5 步到达 目标 e,因此缩小了考虑的范围,具体程序表现为选择到达下一顶点的最小累计代价的行为。
那么,得到了最佳cost-to-go的表,如何提取最佳计划(或路径)?
一种解决方案是为每个顶点存储最优 \(G_{n}^{ \ast}\)所对应的行为,因此这样需要的内存复杂度为 \(O(K\left | X \right |)\) 。
正向值迭代
- 为什么需要正向值迭代?正向值和反向值迭代的区别是什么?
反向:
反向值迭代可以同时找到各顶点到目标顶点的最优计划;
反向值迭代需要目标顶点是确定不变的;
正向:
正向值迭代可以用来找到从初始顶点出发到其他各顶点的最优计划;
正向值迭代需要初始顶点是确定不变的;
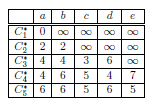
基本思想: 在状态空间中迭代计算最优的 cost-to-come 代价值。
下图为上例,根据正向值迭代得到的最优 cost-to-come 代价值表。
最优不定步长规划
\(L\left ( \pi _{K} \right ) = \sum_{k=1}^{K}l(x_{k},u_{k}) + l_{F}(x_{F})\)
通过引入代价项Lf(xf)这一技巧,将离散可行规划中的约束转换为优化问题代价函数中的一项。
对比最优定长规划问题和最优不定步长规划的区别,主要在于终止条件的设置。
定长问题:

不定步长:允许不同长度的计划

在最优不定步长问题中,从\(x_{I}\)到\(X_{G}\)的两步计划\(\left ( u_{1}, u_{2}\right )\)等效于从\(x_{I}\)到\(X_{G}\)的五步计划\(\left ( u_{1}, u_{2},u_{T},u_{T},u_{T}\right )\),因此最优定长规划中的正(反)向值迭代优化方法都可以扩展用于最优不定步长问题中。
使用逻辑定义离散规划
当状态空间巨大时,对于计算机去解决这样的规划问题会比较困难,基于逻辑的表示形式在定义离散规划问题时比较流行,因为输出的结果是逻辑可解释的,但是由于基于逻辑的表示形式难以泛化,因此在连续空间、感知不确定、多决策的规划问题中,状态空间的表示形式仍然适用。
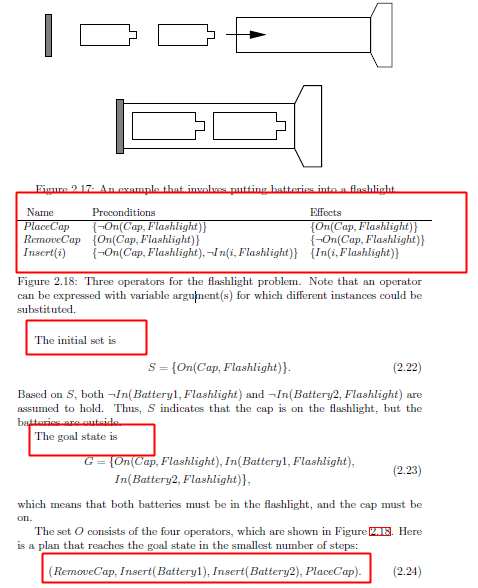
STRIPS-Like 表示法
举例: 放电池到手电筒内
最新文章
- 个人训练记录-赛码"bestcoder"杯中国大学生程序设计冠军赛
- web页面隐藏鼠标
- Python on VS Code
- 2013款Mac Pro“神秘”主机详解
- CSS3秘笈复习:十三章&十四章&十五章&十六章&十七章
- log4j2日志
- shell编程下 特殊变量、test / [ ]判断、循环、脚本排错
- Kubernetes 中的渐进式交付:蓝绿部署和金丝雀部署
- CentOS7 Failed to start LSB: Bring up/down解决方法
- [MCM] 多目标优化 MOP(multi-objective programming)
- AE开发
- swiper实例应用
- [ 转载 ] Tcp三次握手和四次挥手详解
- redis实现异步任务队列
- IHttpModule理解-知识补充
- Effective STL 学习笔记: Item 22 ~ 24
- Running Protractor Tests on Docker
- 第4章-Vue.js 交互及实例的生命周期
- mysql服务常用命令
- gevent For the Working Python Developer
热门文章
- Ubuntu系统下搭建docke
- linux环境:FTP服务器搭建
- Django---MTV和MVC的了解,Django的模版语言变量和逻辑,常见的模板语言过滤器,自定义过滤器,CSRF了解,Django的母版(继承extends,块block,组件include,静态文件的加载load static),自定义simple_tag和inclusion_tag
- English--状语从句
- Trie树的java实现
- SpringBoot,SSM和SSH
- mac python3 安装mysqlclient
- springboot 单元测试 指定启动类
- LINUX基础学习之基础命令(2)--2019-11-18
- 网络文件系统-NFS