WebGL学习笔记(九):阴影
3D中实现实时阴影技术中比较常见的方式是阴影映射(Shadow Mapping),我们这里也以这种技术来实现实时阴影。
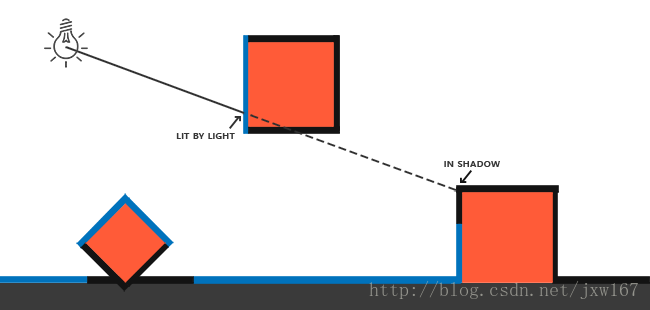
阴影映射背后的思路非常简单:我们先以光的位置为视角进行渲染,我们能看到的东西都将被点亮,看不见的一定是在阴影之中了(这里会将是否可视的信息作为深度贴图进行渲染)。假设有一个地板,在光源和它之间有一个大盒子。由于光源处向光线方向看去,可以看到这个盒子,但看不到地板的一部分,这部分就应该在阴影中了。
平行光的阴影实现方式
相对来说,平行光的实现要简单得多,下面我们看看平行光的阴影实现原理:
- 创建一个帧缓冲对象,用来渲染深度贴图;
- 创建一个和光源方向一致的摄像机对象;
- 创建接收深度的贴图对象;
- 通过自己编写的着色器,渲染深度信息到贴图中;
- 渲染模型时,将之前渲染好的阴影深度贴图传入,通过计算出每个像素相对于平行光的深度之后,和阴影深度贴图上的可显示深度进行对比,如果是不可显示的像素,则当前像素值乘于阴影颜色即可;
示例请查看:https://hammerc.github.io/dou3d-ts/learning/learningNotes/lesson_10/Shadow.html
马赫带
片段着色器中判断当前像素是否处于阴影之中的代码如下:
float visibility = (shadowCoord.z > depth) ? 0.7 : 1.0;
这么写的话,会出现一条一条的纹路,被称为马赫带,解决办法是给深度加上 0.005 的分量,如下:
float visibility = (shadowCoord.z > depth + 0.005) ? 0.7 : 1.0;
阴影生成时使用的透视矩阵类型
一般来说模拟平行光时,生成阴影贴图使用可以使用正交相机,当然也可以使用透视相机来实现距离越近阴影越大的效果;
点光源,点光源不同于平行光,是向所有方向发射光源,所以不能简单的使用平行光的方法来实现,主要的区别在于平行光使用了一个平面贴图,而点光源需要使用一个立方体贴图来实现,具体可以参考:https://blog.csdn.net/jxw167/article/details/57477261
提高精度
上面我们实现了阴影,不过有一个问题,当我们把光照的位置拉远之后(仅使用透视矩阵生成阴影贴图时),会发现阴影消失了:
var LIGHT_X = 0, LIGHT_Y = 40, LIGHT_Z = 2;
这是因为,我们把 gl_FragCoord.z 的深度值存储在只有 8 位的红色分量中导致的,所以距离过远之后,8 位的红色分量就存储不下了,好的方法是所有的分量都用上来存储;
修改后的示例如下:https://hammerc.github.io/dou3d-ts/learning/learningNotes/lesson_10/Shadow_highp.html
阴影投影到球体
除了可以投影到平面,阴影也可以投影到任意模型上,比如球体:https://hammerc.github.io/dou3d-ts/learning/learningNotes/lesson_10/Shadow_highp_sphere.html
最新文章
- Dependency Injection in ASP.NET Core
- Vim 常见操作
- Create XO Checker Game With Oracle Forms
- Netsharp快速入门(之6) 基础档案(创建导航菜单)
- 高效使用Bitmaps(一) 大Bitmap的加载
- 3D旋转特效
- 【 D3.js 入门系列 — 1 】 第一个程序 HelloWorld
- X86寄存器全称
- linux和android开发链接
- Java-ServletConfig
- Hive 查询元数据库获取某个分区的count数
- PEB标记反调试方法
- Es5中的类和静态方法 继承
- MySQL复制框架
- 01_re正则表达式
- noip2007-4
- python第十七课——列表生成式
- rancher下的kubernetes之二:安装rancher和kubernetes
- 机器学习基石第三讲:types of learning
- hdu 2141:Can you find it?(数据结构,二分查找)