TX2Ubuntu16.04上安装 kinectV2
2024-09-03 01:23:22
本文参考 https://www.ncnynl.com/archives/201706/1780.html
参考 https://blog.csdn.net/qq_33835307/article/details/81272377
在TX2上整合kinect v2深度相机,由于TX2默认是USB2.0端口,kinect v2深度相机是USB3.0接口,所以在使用前需要把USB2.0的端口改为USB3.0的端口
1、输入:
sudo gedit /boot/extlinux/extlinux.conf
编辑文件将下面代码做更改
usb_port_owner_info=
更改为
usb_port_owner_info=2
2、禁止USB自动挂起
在usb_port_owner_info=2后空格加上
usbcore.autosuspend=-1
3、安装libfreenect2
1) 下载源码:
cd ~
git clone https://github.com/xlz/libfreenect2
cd libfreenect2
2) 下载依赖
cd depends
./download_debs_trusty.shsudo apt-get install build-essential cmake pkg-config
3)
sudo dpkg -i debs/libusb*deb
4)
sudo apt-get install libturbojpeg libjpeg-turbo8-dev
5)安装 OpenGL
sudo dpkg -i debs/libglfw3*deb
sudo apt-get install -f
sudo apt-get install libgl1-mesa-dri-lts-vivid
6)编译:
cd ..
mkdir build
cd build
cmake .. -DCMAKE_INSTALL_PREFIX=$HOME/freenect2
make
make install
4、
sudo cp ../platform/linux/udev/90-kinect2.rules /etc/udev/rules.d/
重新插上Kinect2重启TX2就可以了。
在终端输入:
libfreenect2/build//bin/Protonect
就可以看到相机的效果图了

安装iai-kinect2
利用命令行从Github上面下载工程源码到工作空间内src文件夹内:
1、下载编译
mkdir -p ~/kinect2_ws/src
cd ~/kinect2_ws/src
git clone https://github.com/code-iai/iai_kinect2.git
cd iai_kinect2
rosdep install -r --from-paths .
cd ~/kinect2_ws
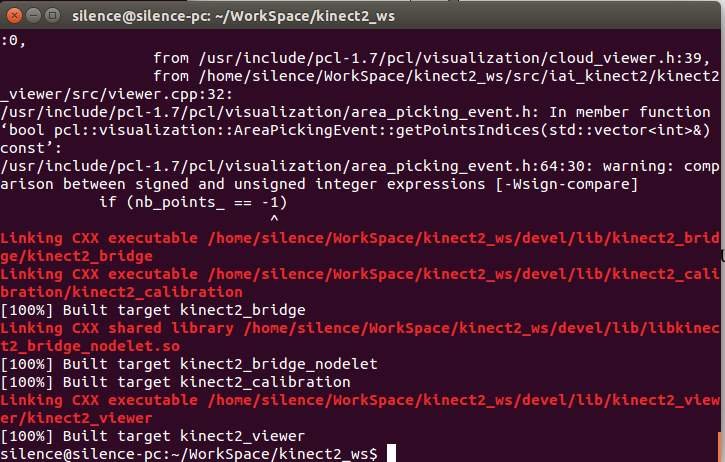
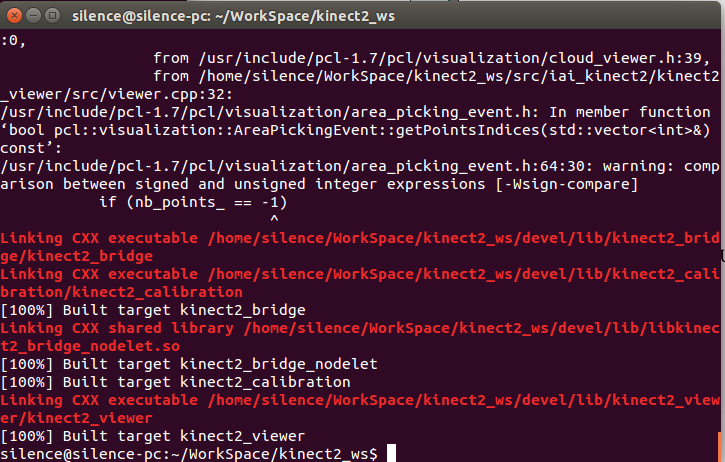
catkin_make -DCMAKE_BUILD_TYPE="Release"
编译结束, 一切OK的话, 会看到如下提示:
还需添加source对应的目录
2、
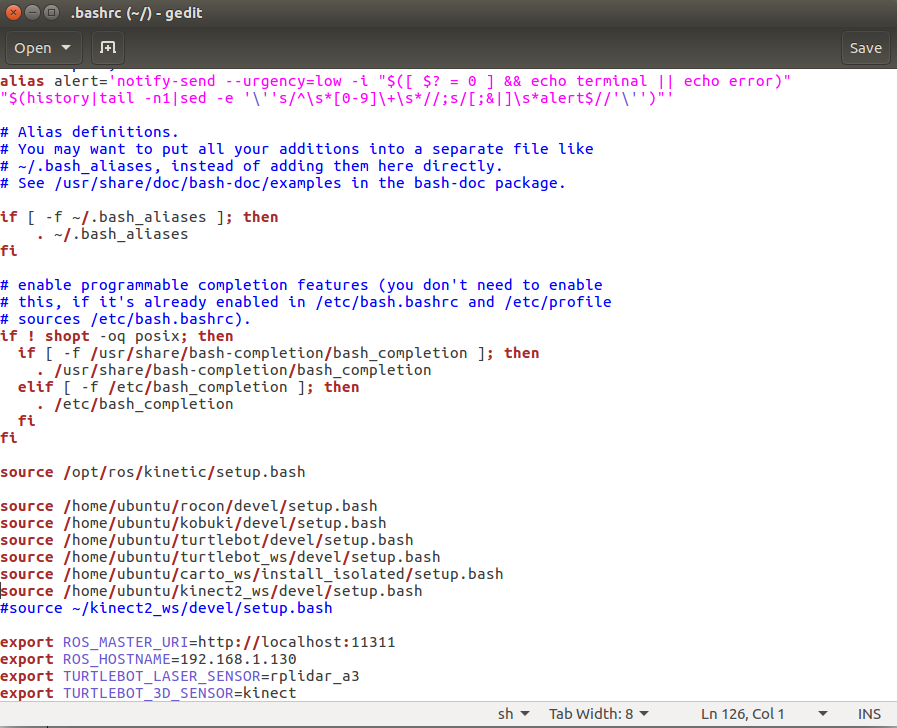
gedit ~/.bashrc
3、添加自己工作空间
source /home/ubuntu/kinect2_ws/devel/setup.bash
在终端输入:
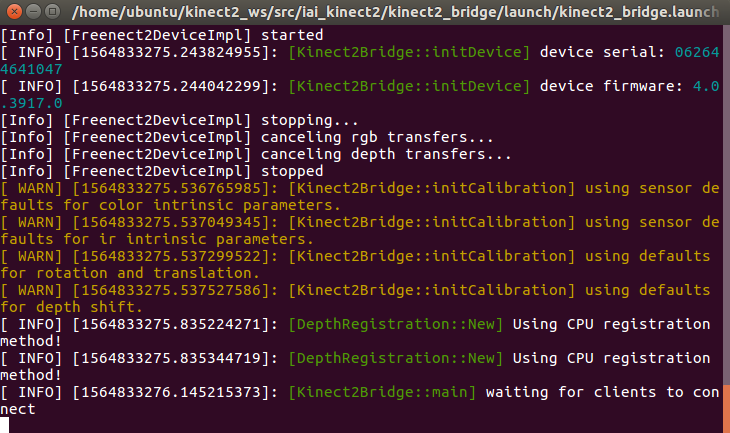
roslaunch kinect2_bridge kinect2_bridge.launch
在ROS内启动kinect2
在新的终端输入
rosrun kinect2_viewer kinect2_viewer sd cloud
可以开启一个Viewer查看cloud数据
非常感谢各论坛、网站提供的资料。
最新文章
- Android Time类 奇葩的设定
- Xcode 运行cocos2dx弹出内部错误对话框(Internal Error)
- mybatis实战教程(mybatis in action)之七:实现mybatis分页
- ae_将面积小于1500的Feature同附近Feature进行合并
- bzoj 3218 a + b Problem(最小割+主席树)
- ubuntu查看命令
- HDOJ-ACM1017(JAVA)
- 为虚机分配指定的IP
- [CC150] Find a line passing the most number of points
- NSNotificationCenter 传对象
- $('#checkbox').attr('checked'); 回报checked或undefined该解决方案
- 购物篮模型&Apriori算法
- simpledet 的配置
- Shell 批量修改主机 用户密码
- Android 实现倒计时操作
- python使用原始套接字 解析原始ip头数据
- luogu P2662 牛场围栏
- textarea 固定大小,滚动条,限制拖动,文字对齐
- Java bean中布尔类型使用注意
- 原生js--addEventListener和attachEvent的区别
热门文章
- spark源码单步跟踪阅读-从毛片说起
- 04 MySQL数据类型
- 内存寻址能力与CPU的位宽有关系吗?
- Git TortoiseGit github 操作
- BMP字节流转成CBitmap类
- 剑指offer - 顺时针打印矩阵 - JavaScript
- yum 安装 Mysql error ERROR 1045 (28000): Access denied for user 'root'@'localhost' (using password: YES) 开启远程连接 修改登入密码 忘记root密码 配置防火墙规则 随手mark
- com.alibaba.druid.pool.DruidDataSource
- stl 题目总结
- ROS常见问题(一) 安装ROS时sudo rosdep init指令报错 最全解决方法