间断有限元h自适应处理方法
细分单元
function Hrefine2D(refineflag)
根据refineflag变量细分单元,其中refineflag变量大小为 [Kx1],需要细分单元标记为1,不需要单元为0。
根据refineflag修改EToV,VX、VY,BCType三组变量。(EToE及EToF会在Setup2D.m脚本中,根据EToV得到)
整个函数分三步:
- 判断需增加多少个新顶点
- 计算新顶点位置
- 修改EToV,VX、VY,BCType三组变量,将新得到的细分单元添加到对应位置
1.统计细分顶点个数
根据Hesthaven(2007)的Nodal discontinuous Galerkin methods - algorithms, analysis, and applications第9章,细分单元采用Four-way element refinement方法——即每个单元等分为四个三角形单元。
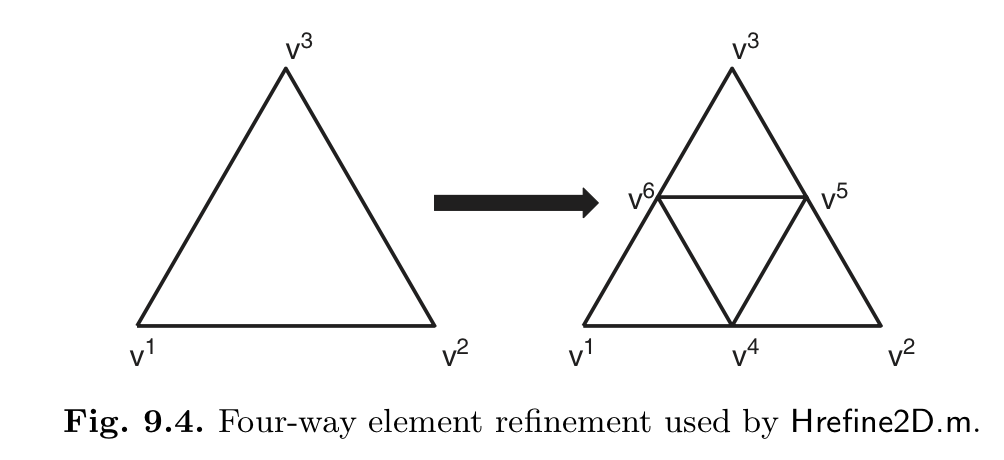
每个细分单元新增加三个顶点,分别为 \(v^4,v^5,v^6\)。但是周围也有单元进行细分时情形就比较复杂,主要分为两种情况:
- 只有 \(K_1\) 进行细分
- \(K_1,K_2\) 同时进行细分
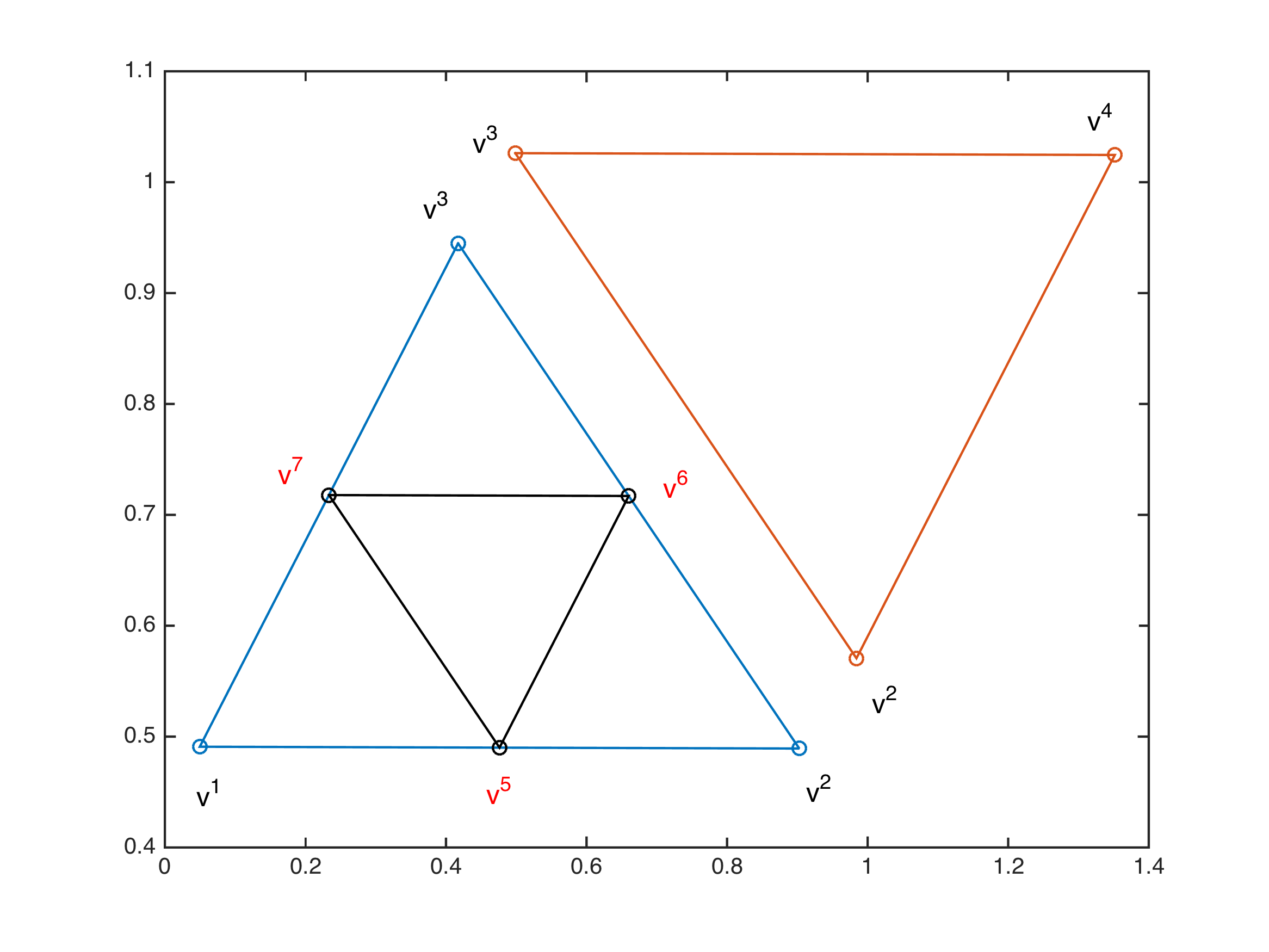
当只对相邻单元中的一个进行细分时,如下图所示,新增加的三个顶点继续进行编号。(注意,因为顶点是唯一的,因此两单元公共顶点编号相同)
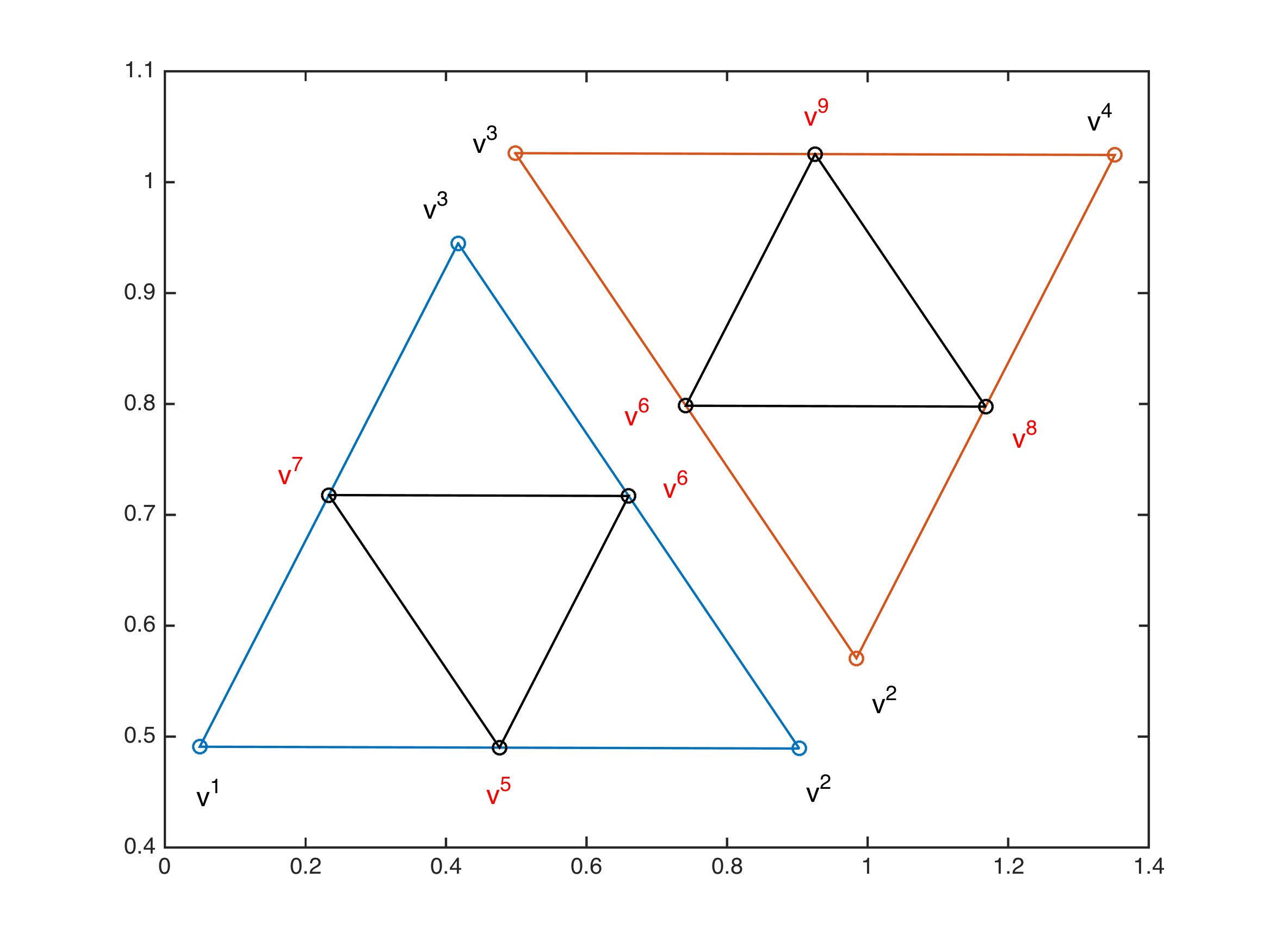
当相邻单元都进行细分时,如下图,此时两个单元新划分的顶点 \(v^6\) 也是一个公共顶点,因此编号相同。即新增加的是五个顶点(\(v^5\) ~ \(v^9\)),而非两个单元各三个顶点。
所以,细分单元时我们需统计不同边的个数,具体方法如下
统计需要细分单元个数Nrefine,及对应单元序号ref
% 1.1 Count vertices
Nv = length(VX(:));
% 1.2 Find and count elements to be refined
ref = sort(find(refineflag));
Nrefine = length(ref);
找到细分单元三个顶点的序列v1、v2、v3等,随后统计需要增加节点个数ids
% 1.3 Extract vertex numbers of elements to refine
v1 = EToV(ref, 1); v2 = EToV(ref, 2); v3 = EToV(ref, 3);
首先获取每个需要细分单元三个面及其对应面的序号,例如,单元k1中面f1,对应的面是k2单元中f2,随后取这两个面序号的最大值作为此细分单元面上顶点的标记。这样,假如两个面是相邻的,而且所在两个单元都需要细分,那么这两个面新增加顶点的标记相同,即只增加一个顶点。
% 1.4 Uniquely number all face centers
v4 = max( 1 + Nfaces*(0:K-1)', EToF(:,1) + Nfaces*(EToE(:,1)-1) );
v5 = max( 2 + Nfaces*(0:K-1)', EToF(:,2) + Nfaces*(EToE(:,2)-1) );
v6 = max( 3 + Nfaces*(0:K-1)', EToF(:,3) + Nfaces*(EToE(:,3)-1) );
获得细分单元三个面上对应标记
% 2.0 Extract face center vertices for elements to refine
v4 = v4(ref); v5 = v5(ref); v6 = v6(ref);
去掉这些标记中重复部分,获得不重复的标记序列ids
% 2.1 Renumber face centers contiguously from Nv+1
ids = unique([v4;v5;v6]);
length(ids)即为增加节点个数,newids变量是使在ids储存的序号位置上分别赋值为1、2、3……
newids(ids) = (1:length(ids))';
最终,确定新顶点序号v4、v5、v6。
v4 = Nv+newids(v4)'; v5 = Nv+newids(v5)'; v6 = Nv+newids(v6)';
由此可看出,新顶点顺序是根据面序号确定的:
- 假如相邻两个单元只有一个需要细分,那么细分单元的面序号为新顶点标记
- 假如相邻两个单元都需要细分,那么取本单元面序号与相邻单元面序号中较大的作为新顶点标记
最终,根据顶点标记大小确定新顶点的序号。
2.更新EToV变量
% 2.2 Replace original triangle with triangle connecting edge centers
EToV(ref,:) = [v4,v5,v6];
中间小三角形使用原始单元序号,对应三个顶点为[v4, v5, v6]。其他三个三角形作为新增单元进行编号,顶点顺序分别为[v1, v4, v6],[v2, v5, v4],[v3, v6, v5]。
% 3.0 Add extra triangles to EToV
EToV(K+1:K+3*Nrefine,1) = [v1;v2;v3]; % first vertices of new elements
EToV(K+1:K+3*Nrefine,2) = [v4;v5;v6]; % second vertices of new elements
EToV(K+1:K+3*Nrefine,3) = [v6;v4;v5]; % third vertices of new elements
3.更新BCType变量
4.更新顶点序列VX,VY及单元数K
顶点个数增加length(ids)个,新的顶点坐标如下
% 3.2 Find vertex locations of elements to be refined
x1 = VX(v1); x2 = VX(v2); x3 = VX(v3);
y1 = VY(v1); y2 = VY(v2); y3 = VY(v3);
% 3.3 Add coordinates for refined edge centers
VX(v4) = 0.5*(x1+x2); VX(v5) = 0.5*(x2+x3); VX(v6) = 0.5*(x3+x1);
VY(v4) = 0.5*(y1+y2); VY(v5) = 0.5*(y2+y3); VY(v6) = 0.5*(y3+y1);
单元个数增加3*Nrefine,即3倍的细分单元数
% 3.4 Increase element count
K = K+3*Nrefine;
统计单元拓扑关系
[EToE,EToF]= tiConnect2D(EToV)
根据EToV变量获得单元与单元EToE及单元与面EToF之间对应关系。
这里采用的方法要比函数Connect2D.m更简单些,主要是通过判断每个面两端顶点序号是否相等。
Nfaces=3;
K = size(EToV,1);
Nnodes = max(max(EToV));
首先将每个面两个顶点序号组成数组fnodes,其顺序按照变量EToV的列进行循环
% create list of all faces 1, then 2, & 3
fnodes = [EToV(:,[1,2]);EToV(:,[2,3]);EToV(:,[3,1])];
将fnodes每行进行排序,顶点序号有小到大,并且序号值减一
fnodes = sort(fnodes,2)-1;
初始化EToE与EToV,此时默认单元与自己相邻
% set up default element to element and Element to faces connectivity
EToE= (1:K)'*ones(1,Nfaces); EToF= ones(K,1)*(1:Nfaces);
随后根据每个面两端节点号给出一个对应标记值,公式为
f = v1 \times Nnodes + v2
\end{equation}\]
其中\(v1\)为较小的顶点标号,\(v2\)为较大的顶点标号。由此可看出,若两个面顶点序号相同,那么其表极值\(f\)也相等。据此,我们就可以找到相邻的两个面序号
% uniquely number each set of three faces by their node numbers
id = fnodes(:,1)*Nnodes + fnodes(:,2)+1;
随后就是寻找具有相同标记值得两个面。定义矩阵spNodeToNode,其中第一列为标记值,第二列为面序号,第三列为该面所在单元,第四列为该面在单元内局部序号
spNodeToNode=[id, (1:Nfaces*K)', EToE(:), EToF(:)];
按照标记值进行排序,找到有对应面所在的行,即indices,其对应面所在行即为indices+1
% Now we sort by global face number.
sorted=sortrows(spNodeToNode,1);
% find matches in the sorted face list
[indices,dummy]=find( sorted(1:(end-1),1)==sorted(2:end,1) );
对EToE与EToF进行赋值
% make links reflexive
matchL = [sorted(indices,:) ;sorted(indices+1,:)];
matchR = [sorted(indices+1,:) ;sorted(indices,:)];
% insert matches
EToE(matchL(:,2)) = matchR(:,3); EToF(matchL(:,2)) = matchR(:,4);
总结:可以看到,函数tiConnect2D仅利用相邻面具有相同节点序号这一性质,找到了计算EToE与EToF简单算法。
non-conforming网格中通量计算
对于在这种细分之后网格上计算,关键问题是边界通量处理。
例如Maxwell方程中,三个方程为
\begin{aligned}
& \left\{\begin{array}{l}
\frac{\partial H_x}{\partial t} = -\frac{\partial E}{\partial y} \cr
\frac{\partial H_y}{\partial t} = \frac{\partial E}{\partial x} \cr
\frac{\partial E}{\partial t} = \frac{\partial H_y}{\partial x} - \frac{\partial H_x}{\partial y}
\end{array} \right.
\end{aligned}
\end{eqnarray}\]
以第一个方程离散为例,得到
\begin{aligned}
& \left\{\begin{array}{l}
\frac{dH_x}{dt} = -D_y E + \frac{1}{2} \left(JM \right)^{-1} \int_{\partial D} \left(n_y \left[E \right] + \alpha \left[n_x H_n \right] - \left[ H_x \right] \right)l(x) \mathrm{ds}
\end{array} \right. \cr
\end{aligned}
\end{eqnarray}\]
其中右端边界通量积分,简写为
\]
其中
\]
而
\begin{bmatrix}
F_n^*(x_{g_0}) \cr
F_n^*(x_{g_1}) \cr
\cdots \cr
F_n^*(x_{g_{n-1}})
\end{bmatrix}\]
p为单元内基函数个数,而n为边上Gauss积分节点个数,\(g_{n-1}\)为积分节点序号。
由此,可看出计算通量主要分两个步骤
- 获得边界Gauss点处通量值\(F_n^*(x_{g_0})\)
- 构造积分质量矩阵IM
这两个步骤主要在函数BuildHNonCon2D中,定义为
[neighbors] = BuildHNonCon2D(NGauss, tol)
获得长度为2的直线上Gauss节点分布
% 1. Build Gauss nodes
[gz, gw] = JacobiGQ(0, 0, NGauss-1);
寻找细分后non-conforming的边界面
non-conforming主要指如下图情况
左面单元细分后,产生4个新单元,但是右侧单元边界无法与左侧细分得到的新单元边界完全对应。因此,左侧细分单元面 \(v^3-v^6\),\(v^6-v^2\) 与右侧单元 \(v^3-v^2\) 即为三个需特殊处理的non-conforming面。
注意,在单元细分后更新单元间拓扑关系时,若两单元边界面节点不同,那么在边界处没有单元与之对应,EToE将储存自身单元序号。
% 1.1 Find location of vertices of boundary faces
vx1 = VX(EToV(:,[1,2,3])); vx2 = VX(EToV(:,[2,3,1]));
vy1 = VY(EToV(:,[1,2,3])); vy2 = VY(EToV(:,[2,3,1]));
寻找没有相邻单元的面序号idB
idB = find(EToE==((1:K)'*ones(1,Nfaces)));
获得这些面的顶点坐标x1,y1与x2,y2
x1 = vx1(idB)'; y1 = vy1(idB)';
x2 = vx2(idB)'; y2 = vy2(idB)';
获得这些面的单元序号elemtsB与局部单元序号facesB
% 1.2 Find those element-faces that are on boundary faces
[elmtsB,facesB] = find(EToE==((1:K)'*ones(1,Nfaces)));
Nbc = length(elmtsB); % No. of boundary faces
下面则开始对这些边界面循环,找出与其对应的面,并计算插值矩阵与积分质量矩阵。
寻找对应面
首先获得本边界面的单元编号、局部面编号与顶点坐标 \([x11, y11]\),\([x12, y12]\)
% 2.2 Find element and face of this boundary face
k1 = elmtsB(b1); f1 = facesB(b1);
% 2.3 Find end coordinates of b1'th boundary face
x11 = x1(b1); y11 = y1(b1); x12 = x2(b1); y12 = y2(b1);
non-conforming对应面分三种情况:
- 面1包含面2
- 面2与面2交错
- 面1被包含于面2
三种情形示意图如下图所示
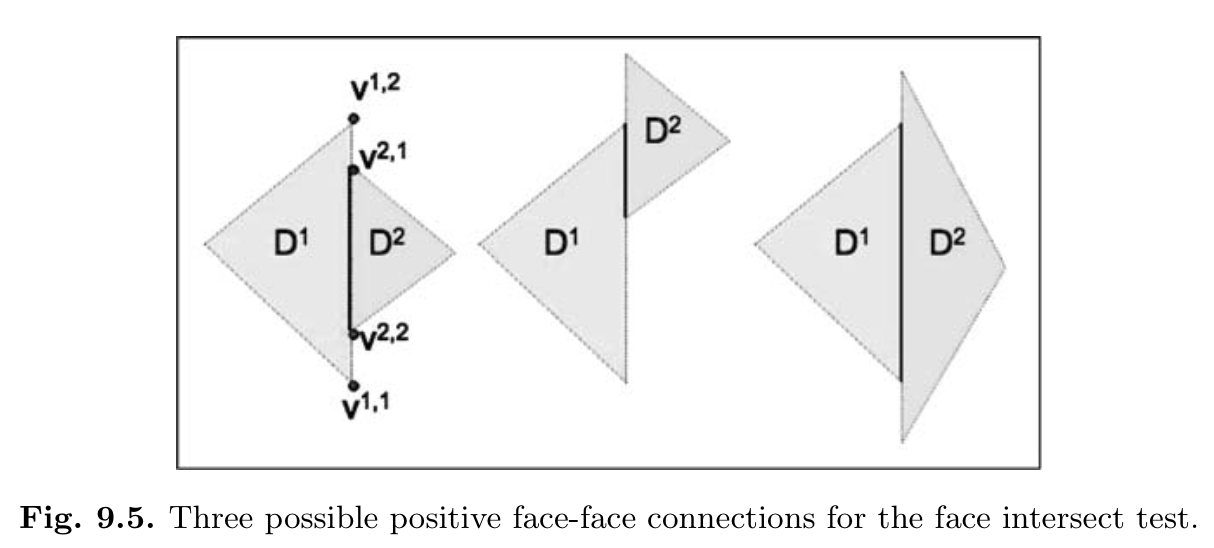
只有两个面有以上三种情形之一时,才认为两个面是对应的。
以上三种情况必须具有以下三个条件:
1.两个面的四个顶点是共线的
共线判定可以根据面1顶点与面2的一个顶点组成平行四边形来判断,若平行四边形面积为0,则面2的顶点就位于面1直线上
area1 = abs((x12-x11)*(y1-y11) - (y12-y11)*(x1-x11)); %scale
area2 = abs((x12-x11)*(y2-y11) - (y12-y11)*(x2-x11));
2.两个面有公共部分
面1顶点\(v^{1,1}\),\(v^{1,2}\)在面2直线上法向投影点\(v_n^{1,1}\),\(v_n^{1,2}\),将投影点利用面2顶点线性组合得到,组合参数为
\begin{aligned}
& v_n^{1,1} = \frac{1-r^1}{2}v^{2,1} + \frac{1+r^1}{2}v^{2,2} \cr
& v_n^{1,2} = \frac{1-r^2}{2}v^{2,1} + \frac{1+r^2}{2}v^{2,2}
\end{aligned}
\end{eqnarray}\]
当\(r^1\),\(r^2\)有如下关系时,两面不对应
- \(r^1 \le -1\) 且 \(r^2 \le -1\) (两面没有公共部分)
- \(r^1 \ge 1\) 且 \(r^2 \ge 1\) (两面没有公共部分)
- \(r^1 = r^2\) (两点投影在同一个点)
下面给出系数\(r^1\),\(r^2\)计算公式
假设点 \(v_n^{1,1}\) 坐标为 \([x_n^{1,1}, y_n^{1,1}]\),根据\(v^{1,1}\)与投影点连线与面2直线垂直可得
\begin{aligned}
& (v_n^{1,1} - v^{1,1})\cdot(v^{2,1} - v^{2,2}) \cr
& = (x_n^{1,1} - x^{1,1})(x^{2,1} - x^{2,2}) + (y_n^{1,1} - y^{1,1})(y^{2,1} - y^{2,2}) = 0
\end{aligned}
\end{eqnarray}\]
将\(v_n^{1,1}\)使用 \(v^{2,1}\) 与 \(v^{2,2}\) 线性表示的表达式代入,整理得方程
r^1 = \frac{(2x^{1,1} - x^{2,1} - x^{2,2})(x^{2,2} - x^{2,1}) + (2y^{1,1} - y^{2,1} - y^{2,2})(y^{2,2} - y^{2,1})}{(x^{2,2} - x^{2,1})^2 + (y^{2,2} - y^{2,1})^2}
\end{equation}\]
同理,\(r^2\)为
r^2 = \frac{(2x^{1,2} - x^{2,1} - x^{2,2})(x^{2,2} - x^{2,1}) + (2y^{1,2} - y^{2,1} - y^{2,2})(y^{2,2} - y^{2,1})}{(x^{2,2} - x^{2,1})^2 + (y^{2,2} - y^{2,1})^2}
\end{equation}\]
对应计算过程写为
L = (x12-x11)^2 + (y12-y11)^2 ;
r21 = ((2*x1-x11-x12)*(x12-x11) + (2*y1-y11-y12)*(y12-y11))/L;
r22 = ((2*x2-x11-x12)*(x12-x11) + (2*y2-y11-y12)*(y12-y11))/L;
再判断之前需要对\(r^1\),\(r^2\)进行一下处理,其过程如下
% 2.5 Find range of local face coordinate (bracketed between -1 and 1)
r1 = max(-1,min(r21,r22)); r2 = min(1,max(r21,r22));
其含义如下,将投影点线性组合系数限制在 [-1,1] 之间。后面用\(r^1\),\(r^2\)计算\(v^{1,1}\) 与 \(v^{1,2}\)坐标时,两点不会位于 \(v^{2,1}\) 与 \(v^{2,2}\) 组成线段之外。
根据以上两个条件,对所有边界面进行判断
% 2.6 Compute flag for overlap of b1 face with all other boundary faces
flag = area1+area2+(r1<= -1 & r2<= -1)+(r1>=1 & r2>=1)+(r2-r1<tol);
获得满足条件的边界面序号及总个数
% 2.7 Find other faces with partial matches
matches = setdiff(find(flag < tol),b1);
Nmatches = length(matches(:));
对应面插值矩阵及积分矩阵计算
下面对每个相接的边界面进行计算。首先获得对应面两端的顶点坐标xy11,xy12。
if(Nmatches>0)
% 3.1 Find matches
r1 = r1(matches); r2 = r2(matches);
% 3.2 Find end points of boundary-boundary intersections
xy11 = 0.5*[x11;y11]*(1-r1) + 0.5*[x12;y12]*(1+r1);
xy12 = 0.5*[x11;y11]*(1-r2) + 0.5*[x12;y12]*(1+r2);
每个对应面上循环
% 3.3 For each face-face match
for n=1:Nmatches
获得对应面单元号与局部面号,储存在结构数组neighbors中
% 3.4 Store which elements intersect
k2 = elmtsB(matches(n)); f2 = facesB(matches(n));
neighbors{sk}.elmtM = k1; neighbors{sk}.faceM = f1;
neighbors{sk}.elmtP = k2; neighbors{sk}.faceP = f2;
根据对应面顶点计算在两面交界面上Gauss点坐标
% 3.5 Build physical Gauss nodes on face fragment
xg = 0.5*(1-gz)*xy11(1,n) + 0.5*(1+gz)*xy12(1,n);
yg = 0.5*(1-gz)*xy11(2,n) + 0.5*(1+gz)*xy12(2,n);
计算Gauss点在两个单元中局部坐标 \((r,s)\)
% 3.6 Find local coordinates of Gauss nodes
[rg1,sg1] = FindLocalCoords2D(k1, xg, yg);
[rg2,sg2] = FindLocalCoords2D(k2, xg, yg);
简要介绍下函数FindLocalCoords2D。在三角形单元中我们知道标准单元与计算单元之间有如下映射关系
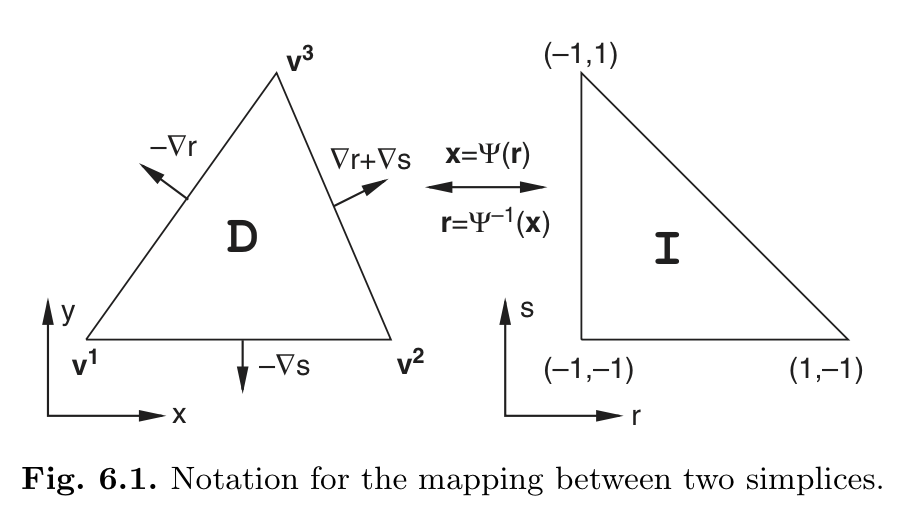
\textbf{x} = -\frac{r+s}{2}v^1 + \frac{r+1}{2}v^2 + \frac{s+1}{2}v^3
\end{equation}\]
因此,若已知三角形内节点坐标 \(\textbf{x} = [x_g, y_g]\) 时,也可利用以上公式反求 \([r,s]\)。
其中 [rg1,sg1] 为Gauss节点在本单元局部坐标,[rg2,sg2] 为Gauss节点在对面单元局部坐标。
在知道局部坐标后,下一步就是计算插值矩阵。每个单元中储存的未知数 \(u\) 是 Lagrange 基函数系数,也可看成是近似解 \(u(x)\) 在 Lagrange 节点上函数值。插值矩阵目的就是根据单元 Lagrange 节点函数值,获得近似解\(u(x)\)在 Gauss 节点处值。
方法很简单,及通过中间基函数(Jacobi基函数)进行准换。已知 Lagrange 基函数与 Jacobi 基函数有以下关系
V^T \cdot l(x) = P(x)
\end{equation}\]
其中 \(V\) 为Vandermonde 矩阵,对应元素值为
V_{ij} = P_{j-1}(r_i)
\end{equation}\]
两个基函数系数之间对应关系为
V \mathbf{ \hat{u} } = \mathbf{u}
\end{equation}\]
注意,若右端系数为Gauss节点近似值\(u_g\)时,对应 Vandermonde 矩阵分量 \(V_g\) 为
V_{g\{i,j\}} = P_{j-1}(r_{g_i})
\end{equation}\]
因此,插值过程为
- 将解准换为 Jacobi 基函数系数 \(\mathbf{\hat{u}} = V^{-1} \cdot \mathbf{u}\)
- 将 Jacobi 基函数系数转换为Gauss点节点值 \(\mathbf{u}_g = V_g \cdot \mathbf{\hat{u}}\)
而插值矩阵即为
InterpolationMatrix = V_g \cdot V^{-1}
\end{equation}\]
程序中函数InterpMatrix2D负责计算插值矩阵gVM与gVP,两个矩阵分别用于本单元与对应单元插值计算。
% 3.7 Build interpolation matrices for volume nodes ->Gauss nodes
gVM = InterpMatrix2D(rg1,sg1); neighbors{sk}.gVM = gVM;
gVP = InterpMatrix2D(rg2,sg2); neighbors{sk}.gVP = gVP;
交接面外法线向量
% 3.8 Find face normal
neighbors{sk}.nx = nx(1+(f1-1)*Nfp,k1);
neighbors{sk}.ny = ny(1+(f1-1)*Nfp,k1);
最后,则是积分矩阵的计算。
在DG-FEM框架中,离散后的边界通量计算公式为
(JM)^{-1} J_s \int_{\partial \Omega} l(x) F^*_n ds = (JM)^{-1} J_s \sum_{g = 1}^{p} w_g \left( l(x_g) F^*_n(x_g) \right)
\end{equation}\]
这里除了需要计算数值通量在Gauss节点值外(插值矩阵),还需知道 Lagrange 基函数 \(l(x)\) 在Gauss 节点函数值 \(l(x_g)\)。
这里利用如下关系,在单元中
l(x_g) = (V^T)^{-1} P(x_g)
\end{equation}\]
且矩阵 \(V_g\) 的分量为
V_{g\{i,j\}} = P_{j-1}(r_{g_i})
\end{equation}\]
那么可以得出
(V^T)^{-1} \cdot V_g^T = (V^T)^{-1}[P(x_{g_1}), P(x_{g_2}), P(x_{g_3}) \cdots]
=[l(x_{g_1}), l(x_{g_2}), l(x_{g_3}), \cdots]
\end{equation}\]
而 \((V^T)^{-1} \cdot V_g^T\) 恰好为插值矩阵 \(IM\) 的转置。最终
\begin{aligned}
& \sum_{g = 1}^{p} w_g \left( l(x_g) F^*_n(x_g) \right) = \cr
& [l(x_{g_1}), l(x_{g_2}), l(x_{g_3}), \cdots] \cdot \begin{bmatrix}
w_1 & 0 & 0 & \cdots \cr
0 & w_2 & 0 & \cdots \cr
0 & 0 & w_3 & \cdots \cr
\cdots & \cdots & \cdots & \cdots \cr
\end{bmatrix}
\begin{bmatrix}
F_n^*(x_{g_1}) \cr
F_n^*(x_{g_2}) \cr
\cdots \cr
F_n^*(x_{g_n}) \cr
\end{bmatrix} \cr
& = (V^T)^{-1} \cdot V_g^T \cdot diag(w_i) \cdot F^*_n
\end{aligned}
\end{eqnarray}\]
其中
l(x_{g_i}) = \begin{bmatrix}
l_0(x_{g_i}) \cr
l_1(x_{g_i}) \cr
\cdots \cr
l_{p-1}(x_{g_i}) \cr
\end{bmatrix}
\end{equation}\]
即,除了右端通量 \(F^*_n(x_g)\) 外,其余系数写为矩阵形式为
% 4.0 Build partial face data lift operator
% 4.1 Compute weights for lifting
partsJ = sqrt( (xy11(1,n)-xy12(1,n))^2 + (xy11(2,n)-xy12(2,n))^2 )/2;
dgw = gw*partsJ/J(1,k1);
% 4.2 Build matrix to lift Gauss data to volume data
neighbors{sk}.lift = V*V'*(gVM')*diag(dgw);
最终,结构数组neighbours储存了所有non-conforming对应面计算所需条件,包括
- 两边单元号与面局部序号
- 外法向向量
- 对应面两边单元插值到Gauss节点插值矩阵
- 边界积分质量矩阵
在计算时,首先略去non-conforming对应面之间数值通量传递,在计算完其他普通单元后开始循环计算non-conforming对应面之间边界数值通量积分,直到把所有面计算一遍。
最新文章
- 安卓手机 虚拟键盘输入用 position:fixed解决 !!!
- ESLint 规则
- 骑士游历/knight tour - visual basic 解决
- C#~异步编程在项目中的使用
- 为Python添加默认模块搜索路径
- HNOI2008Cards
- FZU Problem 2125 简单的等式
- 网络环境场景以及模拟工具netem
- LeetCode_Minimum Path Sum
- JAVA中的break[标签]continue[标签]用法
- tmux tutorial
- quick-cocos2d-x添加到Pomelo的支持
- MyBatis 批量操作、集合遍历-foreach
- 2015 多校联赛 ——HDU5319(模拟)
- 如何避免 async/await 地狱
- [ Java面试题 ]泛型篇
- Python使用Ctypes与C/C++ DLL文件通信过程介绍及实例分析
- mysql学习3:mysql之my.cnf详解
- 【运维】浪潮服务器一块硬盘显示红色Offline(或者Failed)解决办法
- webpack 练习笔记