第二课2、ROS
1、ROS框架
分为以下三个级别:
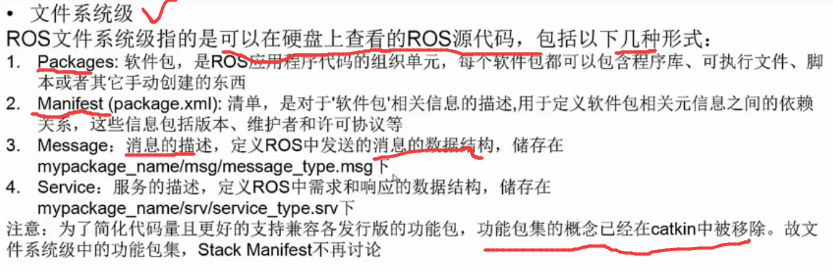
1)文件系统级
2)计算图级
计算图级是ROS处理数据的一种点对点的网络形式,描述程序是如何运行的。
基本的计算图级概念包括:节点,参数服务器,消息,服务,主题和包等
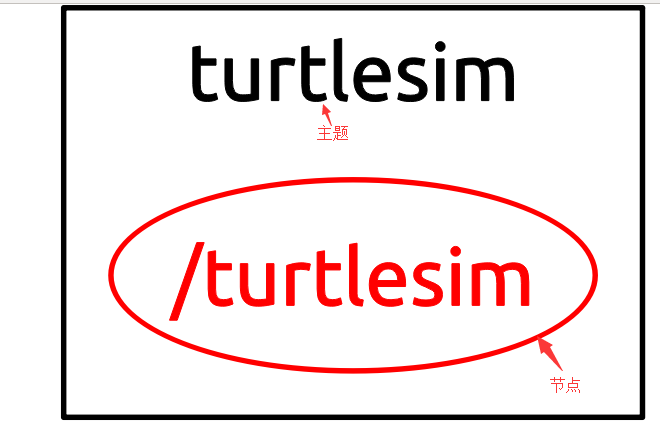
节点:node,一个节点即为一个可执行文件,它可以通过ROS与其他节点进行通信;
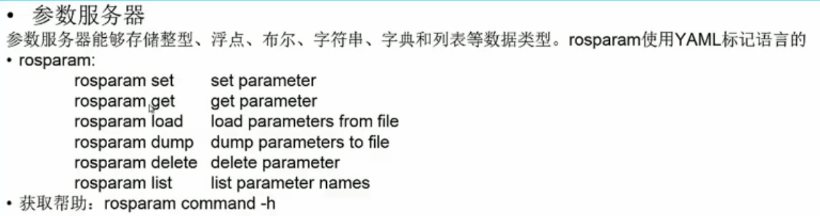
参数服务器:parameter server 参数服务器允许数据通过在一个中心位置的关键词来存储;
举个例子:
要看turtlesim仿真器的参数有哪些,可以先运行该仿真节点,rosrun turtlesim turtlesim_node,然后再打开一个终端输入rosparam list可以列出当前所有的参数。
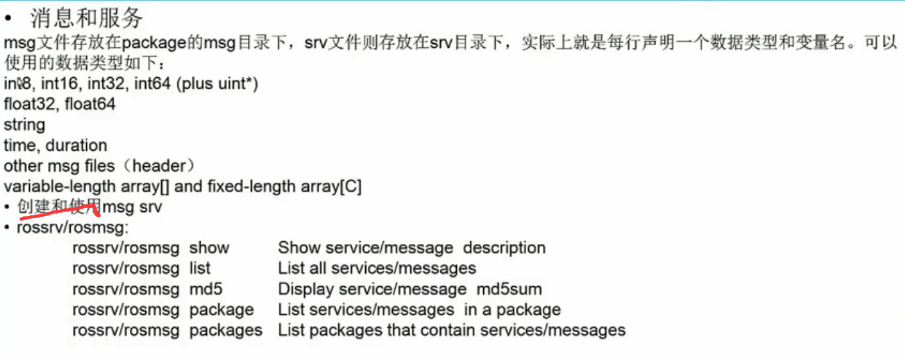
消息:message,消息是一种ROS数据类型,用于订阅或发布到一个话题;
例子:
还是以上面的例子来说,再打开一个终端,因为要查看某个消息,先查看某个主题,rostopic list,列出一些主题,下面以/turtle1/cmd_vel为例,
查看该话题的相关信息,rostopic info /turtle1/cmd_vel;然后可以看到它的发布者,订阅者以及消息类型,它的消息类型为
geometry_msgs/Twist.下面查看该消息的具体类型rosmsg show geometry_msgs/Twist。
下面是往某话题上发布某消息的命令行上的命令:

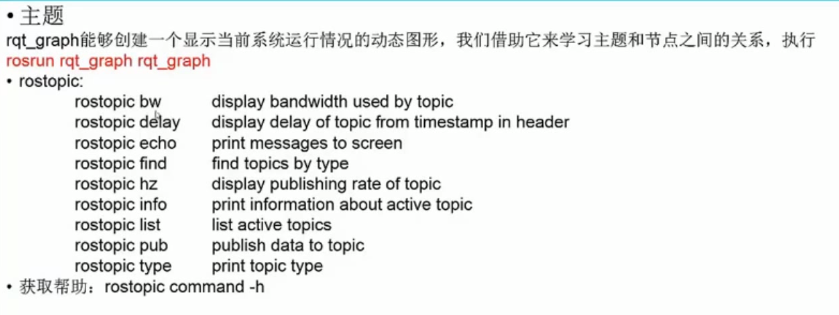
主题:topic,节点可以发布消息到话题,也可以订阅话题以接收消息;
服务:services,是节点之间通讯的另一种方式,服务允许节点发送请求并获得响应。
服务的用法类似于topic


上面使用rosservice list查看了当前的所有服务,并使用rosservice info /clear来查看了服务/clear的相关信息,得到该服务的类型是std_srvs/Empty,然后使用rossrv show std_srvs/Empty来查看该服务类型的具体信息。
消息记录包:bag,是一种用于保存和回放ROS消息数据的格式。如保存地图并回放
节点管理器:master,ROS名称服务(如帮助节点找到彼此)
rosout:ROS中相当于stdout/stderr
roscore:主机+rosout+参数服务器
3)社区级
即网络软件仓库:ros club exbot.
ROS的基本命令和工具


主题

最新文章
- 邻接表有向图(三)之 Java详解
- Android自定义标题栏
- world machine, 输出lightmap
- [DE2i-150] 重建PCIe_Fundmental範例說明
- 让memcached和mysql更好的工作
- 数学(矩阵乘法,随机化算法):POJ 3318 Matrix Multiplication
- leetcode第35题--Valid Sudoku
- jdbc学习笔记
- sqlserver存储过程sp_send_dbmail邮件(html)实际应用
- 【转】STM32 独立看门狗简介
- 11代理模式Proxy
- 联系customer的js
- django创建app、在视图函数及url中使用参数、url命名、通过redirect实现网页路径跳转
- topcoder srm 706 div1
- Win32汇编环境搭建教程(MASM32 SDK)
- WPF DataGrid分组和排序
- python3处理json数据
- oozie 客户端常用命令
- VMware 虚拟机安装
- SpringMVC初写(四)上传和下载功能的实现
热门文章
- spring boot 项目搭建时,各个依赖的作用
- HDFS relaxes a few POSIX requirements to enable streaming access to file system data
- lamp环境的搭建和配置
- Wix Burn:如何将32位和64位的安装包制作成一个安装包
- Drupal 安装过程
- ORACLE DATABASE 10g EXPRESS EDITION LICENSE AGREEMENT
- angularJs-HelloWorld
- OC中RAC编程block的基本使用
- 《avascript 高级程序设计(第三版)》 ---第三章 基本概念
- html5--1.19 通用属性