SRS之SrsRtmpConn::publishing详解
2024-09-24 06:33:55
1. SrsRtmpConn::publishing
int SrsRtmpConn::publishing(SrsSource* source)
{
int ret = ERROR_SUCCESS;
/* 在配置文件中配置了 refer_publish 配置项才会进行 refer check */
if ((ret = refer->check(req->pageUrl, _srs_config->get_refer_pubish(req->vhost)))
!= ERROR_SUCCESS) {
srs_error("check publish_refer failed. ret=%d", ret);
return ret;
}
srs_verbose("check publish_refer success.");
/* 若配置文件中使能了 http_hooks 配置项,则调用该函数,否则忽略 */
if ((ret = http_hooks_on_publish()) != ERROR_SUCCESS) {
srs_error("http hook on_publish failed. ret=%d", ret);
return ret;
}
/* 若配置文件中没有配置 mode 配置项,则返回 false */
bool vhost_is_edge = _srs_config->get_vhost_is_edge(req->vhost);
if ((ret = acquire_publish(source, vhost_is_edge)) == ERROR_SUCCESS) {
// use isolate thread to recv,
// @see: https://github.com/ossrs/srs/issues/237
SrsPublishRecvThread trd(rtmp, req,
st_netfd_fileno(stfd), 0, this, source,
client_type != SrsRtmpConnFlashPublish,
vhost_is_edge);
srs_info("start to publish stream %s success", req->stream.c_str());
/* 该函数会启动接收推流数据的线程 recv,然后当前线程会循环进入休眠,并在醒来
* 后更新状态信息 */
ret = do_publishing(source, &trd);
// stop isolate recv thread
trd.stop();
}
if (ret != ERROR_SYSTEM_STREAM_BUSY) {
release_publish(source, vhost_is_edge);
}
/* whatever the acquire publish, always release publish.
* when the acquire error in the middle-way, the publish state changed,
* but failed, so we must cleanup it.
* @see https://github.com/ossrs/srs/issues/474: srs_librtmp推送后返回错误码1009
* @remark when stream is busy, should never release it. */
http_hooks_on_unpublish();
return ret;
}
2. SrsRtmpConn::acquire_publish
int SrsRtmpConn::acquire_publish(SrsSource* source, bool is_edge)
{
int ret = ERROR_SUCCESS;
/* 检测是否可以进行 publish */
if (!source->can_publish(is_edge)) {
ret = ERROR_SYSTEM_STREAM_BUSY;
srs_warn("stream %s is already publishing. ret=%d",
req->get_stream_url().c_str(), ret);
return ret;
}
// when edge, ignore the publish event, directly proxy it.
if (is_edge) {
if ((ret = source->on_edge_start_publish()) != ERROR_SUCCESS) {
srs_error("notice edge start publish stream failed. ret=%d", ret);
return ret;
}
} else {
/* 通知可以进行 publish */
if ((ret = source->on_publish()) != ERROR_SUCCESS) {
srs_error("notify publish failed. ret=%d", ret);
return ret;
}
}
return ret;
}
2.1 SrsSource::can_publish
bool SrsSource::can_publish(bool is_edge)
{
/* 当为 edge 时,检测当前 edge 的状态,只要不为 SrsEdgeStatePublish,即可进行 publish */
if (is_edge) {
return publish_edge->can_publish();
}
/* 默认初始化时为 true */
return _can_publish;
}
2.2 SrsSource::on_publish
/**
* publish stream event notify.
* @param _req the request from client, the source will deep copy it,
* for when reload the request of client maybe invalid.
*/
int SrsSource::on_publish()
{
int ret = ERROR_SUCCESS;
// update the request object.
srs_assert(_req);
/* 若当前线程上下文的id与_source_id不一致,表明id改变了,需要更新_source_id,
* 并通知所有的 consumers */
/* whatever, the publish thread is the source or edge source,
* save its id to source id */
on_source_id_changed(_srs_context->get_id);
/* the mix queue to correct the timestamp for mix_correct algorithm */
/* reset the mix queue. */
mix_queue->clear();
/* detect the monotonically again. */
is_monotonically_increase = true;
last_packet_time = 0;
/* create forwarders: 需要配置文件中配置 forward 配置项,否则忽略该函数 */
if ((ret = create_forwarders()) != ERROR_SUCCESS) {
srs_error("create forwarders failed. ret=%d", ret);
return ret;
}
// TODO: FIXME: use initialize to set req.
#ifdef SRS_AUTO_TRANSCODE
if ((ret = encoder->on_publish(_req)) != ERROR_SUCCESS) {
srs_error("start encoder failed. ret=%d", ret);
return ret;
}
#endif
// TODO: FIXME: use initialize to set req.
#ifdef SRS_AUTO_HLS
if ((ret = hls->on_publish(_req, false)) != ERROR_SUCCESS) {
srs_error("start hls failed. ret=%d", ret);
return ret;
}
#endif
// TODO: FIXME: use initialize to set req.
#ifdef SRS_AUTO_DVR
if ((ret = dvr->on_publish(_req)) != ERROR_SUCCESS) {
srs_error("start dvr failed. ret=%d", ret);
return ret;
}
#endif
#ifdef SRS_AUTO_HDS
if ((ret = hds->on_publish(_req)) != ERROR_SUCCESS) {
srs_error("start hds failed. ret=%d", ret);
return ret;
}
#endif
// notify the handler.
srs_assert(handler);
/* handler 指向子类 SrsServer,因此调用子类实现的 on_publish */
if ((ret = handler->on_publish(this, _req)) != ERROR_SUCCESS) {
srs_error("handle on publish failed. ret=%d", ret);
return ret;
}
/* 更新 stat 中的值 */
SrsStatistic* stat = SrsStatistic::instance();
stat->on_stream_publish(_req, _source_id);
return ret;
}
2.2.1 SrsSource::on_source_id_changed
/**
* source id changed
* @id: 当前线程的 id
*/
int SrsSource::on_source_id_changed(int id)
{
int ret = ERROR_SUCCESS;
if (_source_id == id) {
return ret;
}
if (_pre_source_id == -1) {
_pre_source_id = id;
} else if (_pre_source_id != _source_id) {
_pre_source_id = _source_id;
}
/* source id,
* for publish, it's the publish client id.
* for edge, it's the edge ingest id.
* when source id changed, for example, the edge reconnect,
* invoke the on_source_id_changed() to let all clients know.
*/
_source_id = id;
/* SrsConsumer: the consumer for SrsSource, that is a play client. */
/* notice all consumer */
std::vector<SrsConsumer*>::iterator it;
for (it = consumers.begin(); it != consumers.end(); ++it) {
SrsConsumer* consumer = *it;
consumer->update_source_id();
}
retrn ret;
}
2.2.2 SrsServer::on_publish
int SrsServer::on_publish(SrsSource* s, SrsRequest* r)
{
int ret = ERROR_SUCCESS;
/* 暂时忽略,没有启用 */
#ifdef SRS_AUTO_HTTP_SERVER
if ((ret = http_server->http_mount(s, r)) != ERROR_SUCCESS) {
return ret;
}
#endif
return ret;
}
3. SrsPublishRecvThread 构造
/**
* the publish recv thread got message and callback the souorce method
* to process message.
*/
SrsPublishRecvThread::SrsPublishRecvThread(
SrsRtmpServer* rtmp_sdk,
SrsRequest* _req, int mr_sock_fd, int timeout_ms,
SrsRtmpConn* conn, SrsSource* source, bool is_fmle, bool is_edge
): trd(this, rtmp_sdk, timeout_ms)
{
rtmp = rtmp_sdk;
_conn = conn;
/* the params for conn callback. */
_source = source;
_is_fmle = is_fmle;
_is_edge = is_edge;
/* the recv thread error code. */
recv_error_code = ERROR_SUCCESS;
/* the msgs already got. */
_nb_msgs = 0;
/* The video frames we got. */
video_frames = 0;
/* the error timeout cond
* @see https://github.com/ossrs/srs/issues/244 */
error = st_cond_new();
/* merged context id. */
ncid = cid = 0;
req = _req;
mr_fd = mr_sock_fd;
// the mr settings,
// @see https://github.com/ossrs/srs/issues/241
mr = _srs_config->get_mr_enabled(req->vhost);
mr_sleep = _srs_config->get_mr_sleep_ms(req->vhost);
realtime = _srs_config->get_realtime_enabled(req->vhost);
/* for reload handler to register itself,
* when config service do the reload, callback the handler. */
_srs_config->subscribe(this);
}
该 SrsPublishRecvThread 类中同时有一个 SrsRecvThread 类的成员 trd,因此会同时构造 SrsRecvThread 类。
3.1 SrsRecvThread 构造函数
/**
* the recv thread, use message handler to handle each received message.
*/
SrsRecvThread::SrsRecvThread(ISrsMessageHandler* msg_handler,
SrsRtmpServer* rtmp_sdk, int timeout_ms)
{
timeout = timeout_ms;
/* handler 指向子类 SrsPublishRecvThread 的指针对象 */
handler = msg_handler;
rtmp = rtmp_sdk;
/* 构造一个可重复使用的线程:recv */
trd = new SrsReusableThread2("recv", this);
}
3.2 SrsReusableThread2 构造函数
SrsReusableThread2::SrsReusableThread2(const char* n, ISrsReusableThread2Handler* h,
int64_t interval_us)
{
/* 指向子类 SrsRecvThread 的指针对象 */
handler = h;
/* 构造一个 SrsThread 类,该类代表一个线程 */
pthread = new internal::SrsThread(n, this, interval_us, true);
}
4. SrsRtmpConn::do_publishing
int SrsRtmpConn::do_publishing(SrsSource* source, SrsPublishRecvThread* trd)
{
int ret = ERROR_SUCCESS;
/**
* SrsPithyPrint:
* the stage is used for a collection of object to do print,
* the print time in a stage is constant and not changed,
* that is, we always got one message to print every specified time.
*
* for example, stage #1 for all play clients, print time is 3s,
* if there is 1client, it will print every 3s.
* if there is 10clients, random select one to print every 3s.
* Usage:
* SrsPithyPrint* pprint = SrsPithyPrint::create_rtmp_play();
* SrsAutoFree(SrsPithyPrint, pprint);
* while (true) {
* pprint->elapse();
* if (pprint->can_print()) {
* // print pithy message.
* // user can get the elapse time by: pprint->age()
* }
* // read and write RTMP messages.
* }
*/
SrsPithyPrint* pprint = SrsPithyPrint::create_rtmp_publish();
SrsAutoFree(SrsPithyPrint, pprint);
/* 构建并启动一个专门用于接收客户端推流数据的 recv 线程 */
// start isolate recv thread.
if ((ret = trd->start()) != ERROR_SUCCESS) {
srs_error("start isolate recv thread failed. ret=%d", ret);
return ret;
}
// change the isolate recv thread context id,
// merge its log to current thread.
int receive_thread_cid = trd->get_cid();
trd->set_cid(_srs_context->get_cid());
// initialize the publish timeout.
/* 若没有配置 publish_1stpkt_timeout,则当没有收到消息时使用默认超时时间 20000ms */
publish_1stpkt_timeout = _srs_config->get_publish_1stpkt_timeout(req->vhost);
/* 若没有配置 publish_normal_timeout,则当已经收到过消息时使用默认超时时间 5000ms */
publish_normal_timeout = _srs_config->get_publish_normal_timeout(req->vhost);
// set the sock options.
set_sock_options();
if (true) {
/* vhost{} 中是否启用了 mr 功能,否返回 false */
bool mr = _srs_config->get_mr_enabled(req->vhost);
int mr_sleep = _srs_config->get_mr_sleep_ms(req->vhost);
srs_trace("start publish mr=%d/%d, p1stpt=%d, pnt=%d, tcp_nodelay=%d, rtcid=%d",
mr, mr_sleep, publish_1stpkt_timeout, publish_normal_timeout,
tcp_nodelay, receive_thread_cid);
}
int64_t nb_msgd = 0;
uint64_t nb_frames = 0;
while (!disposed) {
/* 自动计算经过的时间 */
pprint->elapse();
// when source is set to expired, disconnect it.
if (expired) {
ret = ERROR_USER_DISCONNECT;
srs_error("connection expired. ret=%d", ret);
return ret;
}
// cond wait for timeout.
if (nb_msgs == 0) {
// when not got msgs, wait for a larger timeout.
// @see https://github.com/ossrs/srs/issues/441
trd->wait(publish_1stpkt_timeout);
} else {
trd->wait(publish_normal_timeout);
}
// check the thread error code.
if ((ret = trd->error_code()) != ERROR_SUCCESS) {
if (!srs_is_system_control_error(ret) && !srs_is_client_gracefully_close(ret))
{
srs_error("recv thread failed. ret=%d", ret);
}
return ret;
}
// when not got any messages, timeout.
if (trd->nb_msgs() <= nb_msgs) {
ret = ERROR_SOCKET_TIMEOUT;
srs_warn("publish timeout %dms, nb_msgs=%"PRId64", ret=%d",
nb_msgs? publish_normal_timeout : publish_1stpkt_timeout, nb_msgs, ret);
break;
}
nb_msgs = trd->nb_msgs();
// Update the stat for video fps.
// @remark https://github.com/ossrs/srs/issues/851
SrsStatistic* stat = SrsStatistic::instance();
if ((ret = stat->on_video_frames(req, (int)(trd->nb_video_frames() - nb_frames)))
!= ERROR_SUCCESS) {
return ret;
}
nb_frames = trd->nb_video_frames();
// reportable
if (pprint->can_print()) {
kbps->sample();
bool mr = _srs_config->get_mr_enabled(req->vhost);
int mr_sleep = _srs_config->get_mr_sleep_ms(req->vhost);
srs_trace("<- "SRS_CONSTS_LOG_CLIENT_PUBLISH
" time=%"PRId64", okbps=%d,%d,%d, ikbps=%d,%d,%d, "
"mr=%d/%d, p1stpt=%d, pnt=%d",
pprint->age(),
kbps->get_send_kbps(), kbps->get_send_kbps_30s(), kbps->get_send_kbps_5m(),
kbps->get_recv_kbps(), kbps->get_recv_kbps_30s(), kbps->get_recv_kbps_5m(),
mr, mr_sleep, publish_1stpkt_timeout, publish_normal_timeout
);
}
}
return ret;
}
4.1 SrsPithyPrint::create_rtmp_publish
为 rtmp publish 构造一个 SrsPithyPrint 类。
SrsPithyPrint* SrsPithyPrint::create_rtmp_publish()
{
return new SrsPithyPrint(SRS_CONSTS_STAGE_PUBLISH_USER);
}
4.1.1 SrsPithyPrint 构造函数
SrsPithyPrint::SrsPithyPrint(int _stage_id)
{
stage_id = _stage_id;
client_id = enter_stage();
previous_tick = srs_get_system_time_ms();
_age = 0;
}
4.1.2 SrsPithyPrint::enter_stage
int SrsPithyPrint::enter_stage()
{
SrsStageInfo* stage = NULL;
std::map<int, SrsStageInfo*>::iterator it = _srs_stages.find(stage_id);
if (it == _srs_stages.end()) {
stage = new SrsStageInfo(stage_id);
_srs_stages[stage_id] = stage;
} else {
stage = it->second;
}
srs_assert(stage != NULL);
client_id = stage->nb_clients++;
srs_verbose("enter stage, stage_id=%d, client_id=%d, nb_clients=%d, time_ms=%d",
stage->stage_id, client_id, stage->nb_clients, stage->pithy_print_time_ms);
return client_id;
}
4.2 SrsPublishRecvThread::start: 启动线程
int SrsPublishRecvThread::start()
{
/* 调用 SrsRecvThread::start() */
int ret = trd.start();
ncid = cid = trd.cid();
return ret;
}
4.2.1 SrsRecvThread::start
int SrsRecvThread::start()
{
/* 接着调用 SrsReusableThread2::start() */
return trd->start();
}
4.2.2 SrsReusableThread2::start
/* for the reusable thread, start and stop by user. */
int SrsReusableThread2::start()
{
/* 调用 SrsThread::start() */
return pthread->start();
}
4.2.3 SrsThread::start
int SrsThread::start()
{
int ret = ERROR_SUCCESS;
if (tid) {
srs_info("thread %s already running.", _name);
return ret;
}
if ((tid = st_thread_create(thread_fun, this, (joinable? 1:0), 0)) == NULL) {
ret = ERROR_ST_CREATE_CYCLE_THREAD;
srs_error("st_thread_create failed. ret=%d", ret);
return ret;
}
disposed = false;
// we set to loop to true for thread to run.
loop = true;
// wait for cid to ready, for parent thread to get the cid.
while (_cid < 0) {
st_usleep(10 * 1000);
}
// now, cycle thread can run.
can_run = true;
return ret;
}
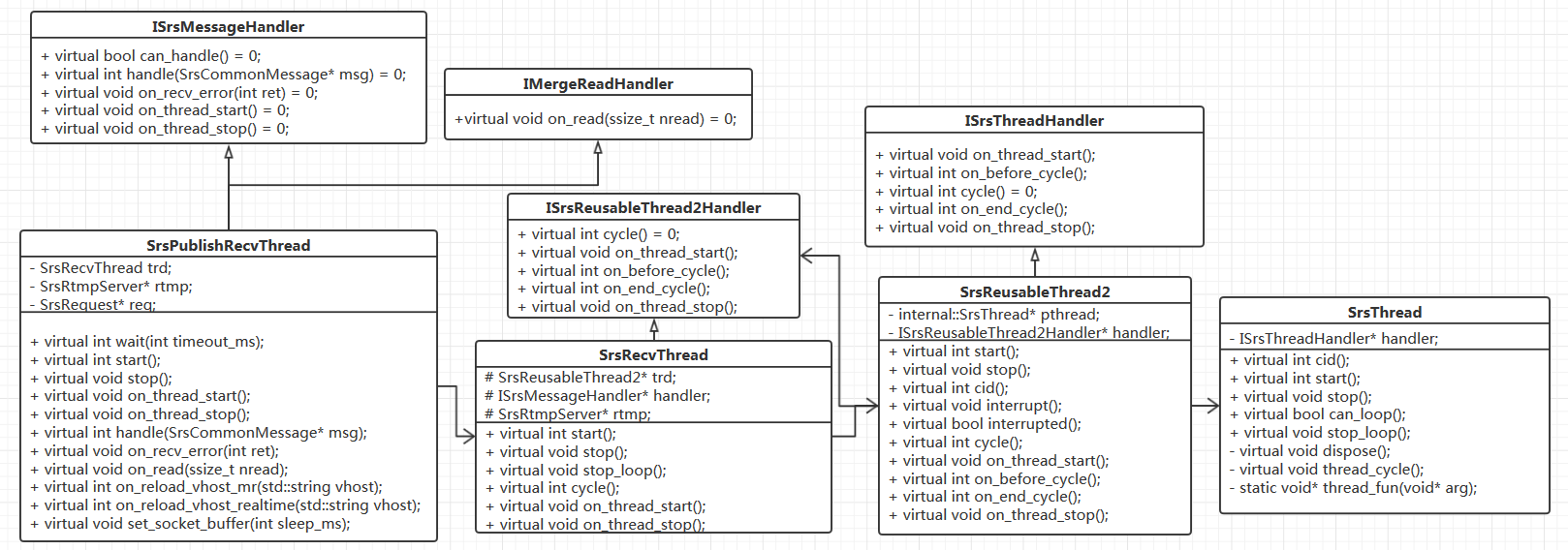
以上 Thread 类之间的关系图
4.3 SrsRtmpConn::set_sock_options
void SrsRtmpConn::set_sock_options()
{
/* 若配置文件中的 vhost{} 没有配置 tcp_nodelay 配置项,默认返回 false */
bool nvalue = _srs_config->get_tcp_nodelay(req->vhost);
if (nvalue != tcp_nodelay) {
tcp_nodelay = nvalue;
#ifdef SRS_PERF_TCP_NODELAY
int fd = st_netfd_fileno(stfd);
socklen_t nb_v = sizeof(int);
int ov = 0;
getsocket(fd, IPPROTO_TCP, TCP_NODELAY, &ov, &nb_v);
int v = tcp_nodelay;
// set the socket send buffer when required larger buffer
if (setsockopt(fd, IPPROTO_TCP, TCP_NODELAY, &v, nb_v) < 0) {
srs_warn("set sock TCP_NODELAY=%d failed.", v);
}
getsocket(fd, IPPROTO_TCP, TCP_NODELAY, &v, &nb_v);
srs_trace("set TCP_NODELAY %d=>%d", ov, v);
#else
srs_warn("SRS_PERF_TCP_NODELAY is disabled but tcp_nodelay configed.");
#endif
}
}
4.4 SrsPithyPrint::elapse
/* auto calc the elapse time */
void SrsPithyPrint::elapse()
{
SrsStageInfo* stage = _srs_stages[stage_id];
srs_assert(stage != NULL);
int64_t diff = srs_get_system_time_ms() - previous_tick;
diff = srs_max(0, diff);
stage->elapse(diff);
_age += diff;
previous_tick = srs_get_system_time_ms();
}
void SrsStageInfo::elapse(int64_t diff)
{
age += diff;
}
4.5 SrsPublishRecvThread::wait
int SrsPublishRecvThread::wait(int timeout_ms)
{
/* 若已经发生错误,则直接返回错误码 */
if (recv_error_code != ERROR_SUCCESS) {
return recv_error_code;
}
// ignore any return of cond wait.
st_cond_timedwait(error, timeout_ms * 1000);
return ERROR_SUCCESS;
}
4.5.1 st_cond_timedwait
int st_cond_timedwait(_st_cond_t* cvar, st_utime_t timeout)
{
_st_thread_t *me = _ST_CURRENT_THREAD();
int rv;
if (me->flags & _ST_FL_INTERRUPT) {
me->flags &= ~_ST_FL_INTERRUPT;
errno = EINTR;
return -1;
}
/* Put caller thread on the condition variable's wait queue */
me->state = _ST_ST_COND_WAIT;
ST_APPEND_LINK(&me->wait_links, &cvar->wait_q);
/* 当超时时间不为 -1 时,将当前线程添加到 sleep 队列中 */
if (timeout != ST_UTIME_NO_TIMEOUT)
_ST_ADD_SLEEPQ(me, timeout);
/* 然后切换上下文环境,直到被条件变量唤醒或是超时事件到了而醒来 */
_ST_SWITCH_CONTEXT(me);
ST_REMOVE_LINK(&me->wait_links);
rv = 0;
if (me->flags & _ST_FL_TIMEDOUT) {
me->flags &= ~_ST_FL_TIMEDOUT;
errno = ETIME;
rv = -1;
}
if (me->flags & _ST_FL_INTERRUPT) {
me->flags &= ~_ST_FL_INTERRUPT;
errno = EINTR;
rv = -1;
}
return rv;
}
4.5.2 ST_APPEND_LINK
/* Insert an element "_e" at the end of the list "_l" */
#define ST_APPEND_LINK(_e, _l) ST_INSERT_BEFORE(_e, _l)
/* Insert element "_e" into the list, before "_l" */
#define ST_INSERT_BEFORE(_e, _l) \
ST_BEGIN_MACRO \
(_e)->next = (_l); \
(_e)->prev = (_l)->prev; \
(-l)->prev->next = (_e); \
(-l)->prev = (_e); \
ST_END_MACRO
4.6 SrsStatistic::on_video_frames
/* When got videos, update the frames.
* We only stat the total number of video frames. */
int SrsStatistic::on_video_frames(SrsRequest* req, int nb_frames)
{
int ret = ERROR_SUCCESS;
SrsStatisticVhost* vhost = create_vhost(req);
SrsStatisticStream* stream = create_stream(vhost, req);
stream->nb_frames += nb_frames;
return ret;
}
5. SrsPublishRecvThread::stop
当从 do_publishing 函数返回时,终止接收推流数据的 recv 线程。
void SrsPublishRecvThread::stop()
{
trd.stop();
}
5.1 SrsRecvThread::stop
void SrsRecvThread::stop()
{
trd->stop();
}
5.2 SrsReusableThread2::stop
void SrsReusableThread2::stop()
{
pthread->stop();
}
5.3 SrsThread::stop
void SrsThread::stop()
{
if (!tid) {
return;
}
/* 设置线程循环标志,退出循环 */
loop = false;
dispose();
_cid = -1;
can_run = false;
tid = NULL;
}
5.4 SrsThread::dispose
void SrsThread::dispose()
{
if (disposed) {
return;
}
// the interrupt will cause the socket to read/write error,
// which will terminate the cycle thread.
st_thread_interrupt(tid);
// when joinable, wait util quit.
if (_joinable) {
// wait the thread to exit.
int ret = st_thread_join(tid, NULL);
if (ret) {
srs_warn("core: ignore join thread failed.");
}
}
// wait the thread actually terminated.
// sometimes the thread join return -1, for example,
// when thread use st_recvfrom, the thread join return -1.
// so here, we use a variable to ensure the thread stopped.
// @remark event the thread not joinable, we must ensure the thread stopped when stop.
while (!really_terminated) {
st_usleep(10 * 1000);
if (really_terminated) {
break;
}
srs_warn("core: wait thread to actually terminated");
}
disposed = true;
}
5.4.1 st_thread_interrupt
void st_thread_interrupt(_st_thread_t *thread)
{
/* If thread is already dead */
if (thread->state == _ST_ST_ZOMEBIE)
return;
/* 设置线程标志为 interrupt */
thread->flags |= _ST_FL_INTERRUPT;
/* 若线程当前正在运行或已在 run 队列中,则直接返回,在线程函数会检测
* 线程的 flags,若发现是 interrput,则会终止线程函数的执行 */
if (thread->state == _ST_ST_RUNNING || thread->state == _ST_ST_RUNNABLE)
return;
/* 否则,若线程当前处于 sleep 队列中,即休眠状态,则将该线程从
* 休眠队列中移除 */
if (thread->flags & _ST_FL_ON_SLEEPQ)
_ST_DEL_SLEEPQ(thread);
/* Make thread runnable */
thread->state = _ST_ST_RUNNABLE;
_ST_ADD_RUNQ(thread);
}
5.4.2 st_thread_join
int st_thread_join(_st_thread_t *thread, void **retvalp)
{
_st_cond_t *term = thread_term;
/* Can't join a non-joinable thread */
if (term == NULL) {
errno = EINVAL;
return -1;
}
if (_ST_CURRENT_THREAD() == thread) {
errno = EDEADLK;
return -1;
}
/* Multiple threads can't wait on the same joinable thread */
if (term->wait_q.next != &term->wait_q) {
errno = EINVAL;
return -1;
}
while (thread->state != _ST_ST_ZOMBIE) {
if (st_cond_timedwait(term, ST_UTIME_NO_TIMEOUT) != 0)
return -1;
}
if (retvalp)
*retvalp = thread->retval;
/*
* Remove target thread from the zombie queue and make it runnable.
* When it gets scheduled later, it will do the clean up.
*/
thread->state = _ST_ST_RUNNABLE;
_ST_DEL_ZOMBIEQ(thread);
_ST_ADD_RUNQ(thread);
return 0;
}
最新文章
- 从爬取湖北某高校hub教务系统课表浅谈Java信息抓取的实现 —— import java.*;
- ruby中tes-unitt数据初始化方法整理
- 高清DVI编码器|上海视涛科技
- 在linux下的firefox中安装flashplayer
- 自动打补丁Bat指令
- linux使用crontab实现PHP执行定时任务及codeiginter参数传递相关
- 【转】Android4.4(MT8685)源码蓝牙解析--BLE搜索
- IQueryable与IEnumberable的区别(转)
- Log4j 2.0在具体解释发展先进的使用—SocketAppender远程输出(五岁以下儿童)
- 详细的SQL中datediff用法
- ci框架基础知识点
- Kafka设计解析(七)- Kafka Stream
- idea搭建可运行Servlet的Web项目[maven]
- day07数据类型的相互转化,字符编码
- E-R视图中有关图形的用法
- Java8 方法引用
- SpringSocial业务系统与社交网站的绑定与解绑
- 产品开发- DFX
- k-means性能测试
- javascript中的iterable