S32K148_CAN驱动(裸机开发)
2024-09-05 10:00:29
hello,大家好。今天我又来啦,今天记录一下S32K148-CAN裸机驱动编写,有错误地方欢迎大家指正。
CAN的发送接收在S32K148中主要有三种方式,一种是邮箱机制(mailbox),一种FIFO方式,还有一种DMA方式。邮箱方式较为简单,也比较好理解。我的想法是先搞懂一种实现方式,再去满满研究其他方法。
邮箱机制主要涉及到一下寄存器:
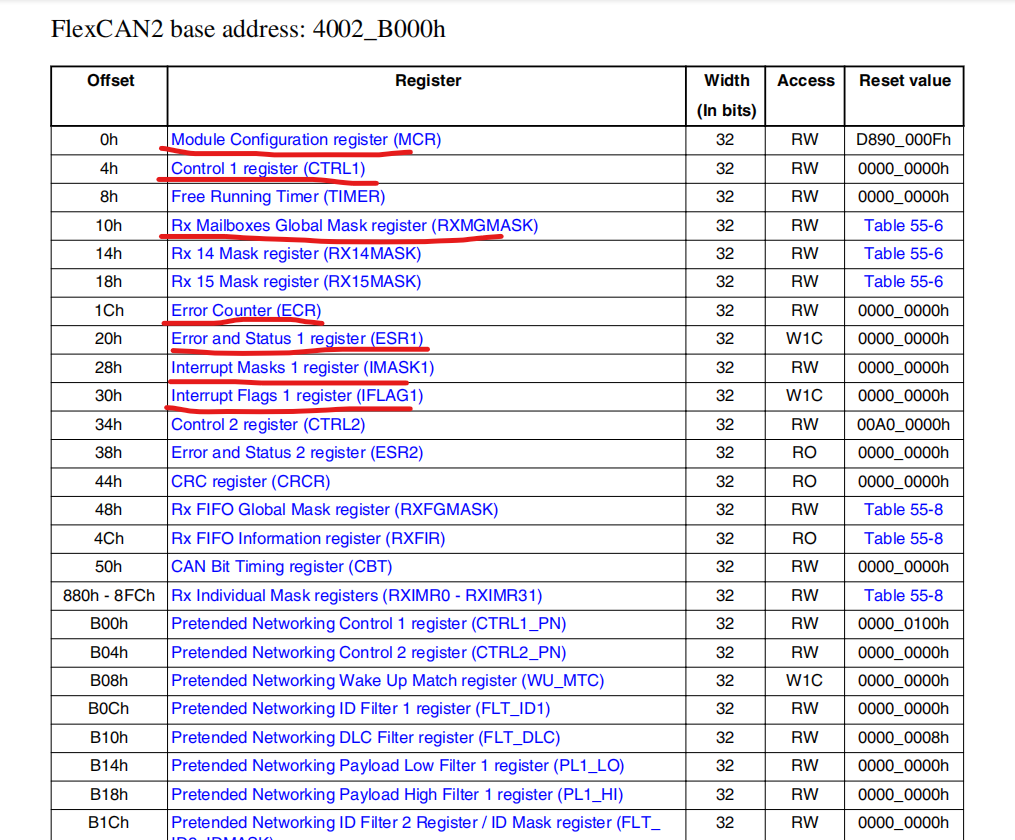
还有一个RAMn[n]寄存器。
具体每个寄存器的功能数据手册有详细介绍,我就不逐个叙述了。直接根据我的demo程序来作简要介绍。
CAN的初始化主要包括:
1)PCC时钟使能
2)CAN发送引脚和接收引脚的复用配置
3)CAN模块程序使能,同时进入冻结模式
4)配置时钟,波特率,MB清0,接收MB的掩码配置,接收MB的code配置
5)接收或发送报文中断使能
#define MSG_BUF_SIZE 4 /* Msg Buffer Size. (CAN 2.0AB: 2 hdr + 2 data= 4 words)1MB = 4words */
#define MB_FIFO_IDX_TX 16u /* MB for transmitting CAN message*/
#define MB_FIFO_IDX_RX 6u /* MB for transmitting CAN message*/
#define MB_FIFO_NUM 6u /* MB0~MB5 for FIFO engine*/
void can2_init(void)
{
PCC->PCCn[PCC_PORTB_INDEX] |= 1<<30;
/*PIN MUX
* PTB12 CAN2 RX
* PTB13 CAN2 TX*/
PORTB->PCR[12] |= 1<<10;
PORTB->PCR[13] |= 1<<10;
/*CAN2 init*/
/*PCC FOR CAN2*/
PCC->PCCn[PCC_FlexCAN2_INDEX] |= 1<<30;
/*CAN2 cfg*/
CAN2->MCR |= 1<<31; //mdis=1,disable module
CAN2->CTRL1 &=~(1<<13); //CLKSRC=0,Clock Source = SOSCDIV2
CAN2->MCR &=~(1<<31); //mdis=0,ENable module //等待进入冻结模式
while( (CAN2->MCR & (1<<24))>>24 == 0 ); CAN2->CTRL1 = 0x01DB0006; //250k,rjw=11,psg1=011,psg2=011,propsg=110,clk=0,presdiv=1,配置时钟and波特率
for(uint8_t i=24; i<128; i++ )
{ /* CAN2: clear 32 msg bufs x 4 words/msg buf = 128 words */
CAN2->RAMn[i] = 0; /* Clear msg buf word */
}
for(uint8_t i=0; i<32; i++ )
{ /* In FRZ mode, init CAN2 16 msg buf filters */
CAN2->RXIMR[i] = 0xFFFFFFFF; /* Check all ID bits for incoming messages */
} CAN2->RXMGMASK = 0x00000000; /* Global acceptance mask: all ID bits DON'T CARE receive all ID message*/ CAN2->RAMn[ 0*MSG_BUF_SIZE + 0] = 0x04000000; /* Msg Buf 4, word 0: Enable for reception */
/* EDL,BRS,ESI=0: CANFD not used */
/* CODE=4: MB set to RX inactive */
/* IDE=0: Standard ID */
/* SRR, RTR, TIME STAMP = 0: not applicable */
//CAN2->RAMn[ 0*MSG_BUF_SIZE + 0] = 0x04200000; /* Msg Buf 4, word 0: Enable for reception */
/* EDL,BRS,ESI=0: CANFD not used */
/* CODE=4: MB set to RX inactive */
/* IDE=1: extend ID */
/* SRR, RTR, TIME STAMP = 0: not applicable */ CAN2->MCR = (0x0000001f) | (1<<17); /*SRXDIS=1,MAXMB=32*/ CAN2->MCR &= ~CAN_MCR_HALT_MASK; /* Negate HALT bit */
/*发送和接收message中断使能*/
CAN2->IMASK1 |= (1<<16)|(1<<0);
/*bus off中断使能*/
CAN2->CTRL1 |= (1<<15);
while ((CAN2->MCR && CAN_MCR_FRZACK_MASK) >> CAN_MCR_FRZACK_SHIFT);/* Good practice: wait for FRZACK to clear (not in freeze mode) */
while ((CAN2->MCR && CAN_MCR_NOTRDY_MASK) >> CAN_MCR_NOTRDY_SHIFT);/* Good practice: wait for NOTRDY to clear (module ready) */
//注册接收中断向量
S32_NVIC_EnableIRQ(CAN2_ORed_0_15_MB_IRQn);
S32_NVIC_EnableIRQ(CAN2_ORed_16_31_MB_IRQn);
//注册bus off中断向量
S32_NVIC_EnableIRQ(CAN2_ORed_IRQn);
}
CAN初始化过程中,需要注意地方在于接收掩码如何配置(原则:0表示不关心,1表示关心),其次配置好接收MB的选择同时使能相应MB的接收中断。这里面CAN发送很简单,主要针对CAN报文接收问题。
发送函数,注意标准帧和扩展帧的设置
void can2_send_8Byte(uint8_t data[], uint8_t datalength, uint32_t id, uint8_t id_mode)
{
uint8_t i;
uint8_t data_tem[datalength];
for(i=0;i<datalength;i++)
{
data_tem[i] = data[i];
}
//CAN2->IFLAG1 |= 0xFFFF0000; //clear all transmit flag
//wait bus idle
// while( (CAN2->ESR1 & (1<<7))>>7 == 0 );
//data input
CAN2->RAMn[MB_FIFO_IDX_TX*MSG_BUF_SIZE + 2] = data_tem[0]<<24 | data_tem[1]<<16 | data_tem[2]<<8 | data_tem[3];
CAN2->RAMn[MB_FIFO_IDX_TX*MSG_BUF_SIZE + 3] = data_tem[4]<<24 | data_tem[5]<<16 | data_tem[6]<<8 | data_tem[7];
//ID cfg
if(id_mode == StandardID)
{
CAN2->RAMn[MB_FIFO_IDX_TX*MSG_BUF_SIZE + 1] = id<<18;
CAN2->RAMn[MB_FIFO_IDX_TX*MSG_BUF_SIZE + 0] = 0x0C480000; //CODE=1100,SRR=1,IDE=0,RTR=0,DLC=1000
}else
{
CAN2->RAMn[MB_FIFO_IDX_TX*MSG_BUF_SIZE + 1] = id;
CAN2->RAMn[MB_FIFO_IDX_TX*MSG_BUF_SIZE + 0] = 0x0C680000; //CODE=1100,SRR=1,IDE=1,RTR=0,DLC=1000
}
}
接收函数
void can2_receive_8Byte(uint8_t id_mode)
{
can2_RecMessage.length = (CAN2->RAMn[0*MSG_BUF_SIZE + 0] >> 16) & 0xF;
if(id_mode == StandardID)
{
can2_RecMessage.id = (CAN2->RAMn[0*MSG_BUF_SIZE + 1] >> 18) & 0x7FF;
}else
{
can2_RecMessage.id = (CAN2->RAMn[0*MSG_BUF_SIZE + 1]) & 0x1FFFFFFF;
}
can2_RecMessage.data[0] = (CAN2->RAMn[0*MSG_BUF_SIZE + 2]) >> 24;
can2_RecMessage.data[1] = ((CAN2->RAMn[0*MSG_BUF_SIZE + 2]) >> 16) & 0xFF;
can2_RecMessage.data[2] = ((CAN2->RAMn[0*MSG_BUF_SIZE + 2]) >> 8) & 0xFF;
can2_RecMessage.data[3] = (CAN2->RAMn[0*MSG_BUF_SIZE + 2]) & 0xFF;
can2_RecMessage.data[4] = (CAN2->RAMn[0*MSG_BUF_SIZE + 3]) >> 24;
can2_RecMessage.data[5] = ((CAN2->RAMn[0*MSG_BUF_SIZE + 3]) >> 16) & 0xFF;
can2_RecMessage.data[6] = ((CAN2->RAMn[0*MSG_BUF_SIZE + 3]) >> 8) & 0xFF;
can2_RecMessage.data[7] = (CAN2->RAMn[0*MSG_BUF_SIZE + 3]) & 0xFF;
}
这个时候还不能接收,因为我需要把这个接收函数放到中断函数中,因为我配置的接收MB为0,所以接收中断函数是CAN2_ORed_0_15_MB_IRQHandler();
void CAN2_ORed_0_15_MB_IRQHandler(void)
{
gpio_reverse(PTe, 22);
can2_receive_8Byte(StandardID);
CAN2->IFLAG1 |= 0x0000FFFF;//清除标志位
}
每次接收到报文后,进入中断,在接收中断函数里读取报文ID和DATA。注意在中断函数里清除相应的MB标志位,即可进行下一次接收中断。
本次我设置的接收全局掩码设置都为0x0,且设置的标准帧。所以对于所有的标准帧ID报文,我都可以接收。
最新文章
- 推荐学习使用cocoapods和phoneGap安装的链接
- 【洛谷P3385】模板-负环
- NOIP2013
- NumberPicker设置宽度,设置文字颜色
- Mac下Apache Tomcat安装配置
- JavaScript window
- UIWebView stringByEvaluatingJavaScriptFromString的使用方法
- NSNumber 、 NSValue 、 日期处理 、 集合类 、 NSArray(一)
- 【linux】linux如何进入单人维护模式修改root密码
- POJ 1062 昂贵的聘礼 (最短路)
- Android——获取网络图片
- 【python之路7】python基本数据类型(一)
- Application使用示例
- ExtJS 4 Grids 详解
- arttemplate与webpack的应用
- centos 5.3 安装(samba 3.4.4)
- 初学mysql 那些记不住的命令
- Python学习-字符编码浅析
- 饮冰三年-人工智能-linux-08 软件包管理(Python的安装)
- 《Microsoft SQL Server 2012 T-SQL Fundamentals》