大话目标检测经典模型(RCNN、Fast RCNN、Faster RCNN)
目标检测是深度学习的一个重要应用,就是在图片中要将里面的物体识别出来,并标出物体的位置,一般需要经过两个步骤:
1、分类,识别物体是什么
2、定位,找出物体在哪里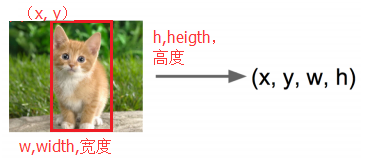
除了对单个物体进行检测,还要能支持对多个物体进行检测,如下图所示: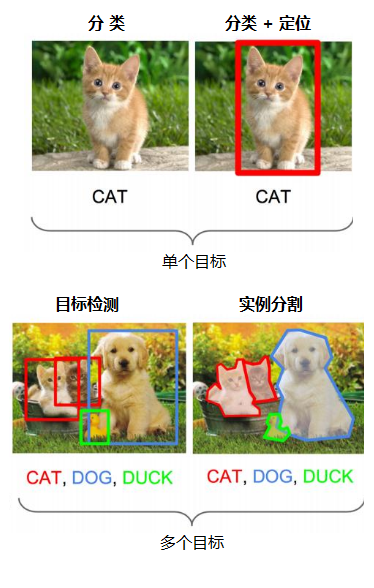
这个问题并不是那么容易解决,由于物体的尺寸变化范围很大、摆放角度多变、姿态不定,而且物体有很多种类别,可以在图片中出现多种物体、出现在任意位置。因此,目标检测是一个比较复杂的问题。
最直接的方法便是构建一个深度神经网络,将图像和标注位置作为样本输入,然后经过CNN网络,再通过一个分类头(Classification head)的全连接层识别是什么物体,通过一个回归头(Regression head)的全连接层回归计算位置,如下图所示: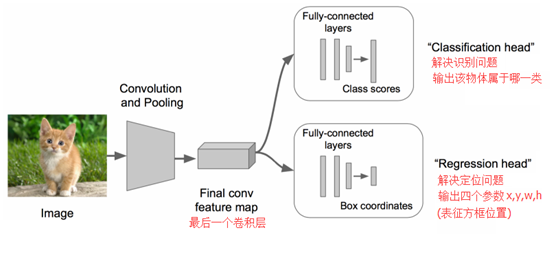
但“回归”不好做,计算量太大、收敛时间太长,应该想办法转为“分类”,这时容易想到套框的思路,即取不同大小的“框”,让框出现在不同的位置,计算出这个框的得分,然后取得分最高的那个框作为预测结果,如下图所示: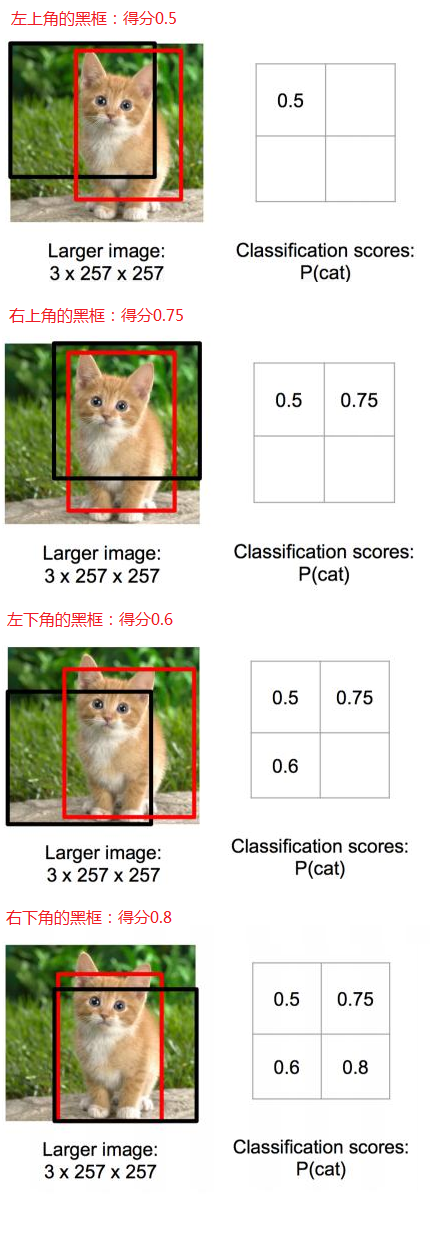
根据上面比较出来的得分高低,选择了右下角的黑框作为目标位置的预测。
但问题是:框要取多大才合适?太小,物体识别不完整;太大,识别结果多了很多其它信息。那怎么办?那就各种大小的框都取来计算吧。
如下图所示(要识别一只熊),用各种大小的框在图片中进行反复截取,输入到CNN中识别计算得分,最终确定出目标类别和位置。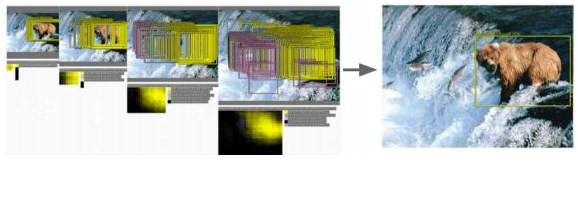
这种方法效率很低,实在太耗时了。那有没有高效的目标检测方法呢?
一、R-CNN 横空出世
R-CNN(Region CNN,区域卷积神经网络)可以说是利用深度学习进行目标检测的开山之作,作者Ross Girshick多次在PASCAL VOC的目标检测竞赛中折桂,2010年更是带领团队获得了终身成就奖,如今就职于Facebook的人工智能实验室(FAIR)。
R-CNN算法的流程如下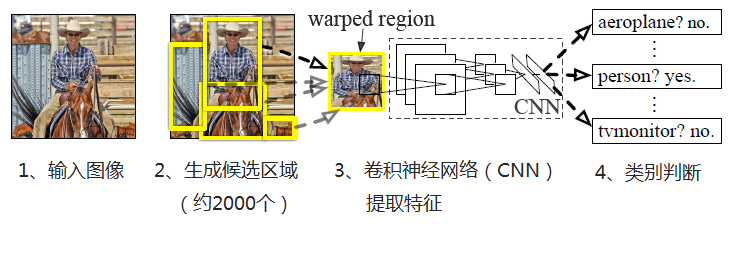
1、输入图像
2、每张图像生成1K~2K个候选区域
3、对每个候选区域,使用深度网络提取特征(AlextNet、VGG等CNN都可以)
4、将特征送入每一类的SVM 分类器,判别是否属于该类
5、使用回归器精细修正候选框位置
下面展开进行介绍
1、生成候选区域
使用Selective Search(选择性搜索)方法对一张图像生成约2000-3000个候选区域,基本思路如下:
(1)使用一种过分割手段,将图像分割成小区域
(2)查看现有小区域,合并可能性最高的两个区域,重复直到整张图像合并成一个区域位置。优先合并以下区域:
- 颜色(颜色直方图)相近的
- 纹理(梯度直方图)相近的
- 合并后总面积小的
- 合并后,总面积在其BBOX中所占比例大的
在合并时须保证合并操作的尺度较为均匀,避免一个大区域陆续“吃掉”其它小区域,保证合并后形状规则。
(3)输出所有曾经存在过的区域,即所谓候选区域
2、特征提取
使用深度网络提取特征之前,首先把候选区域归一化成同一尺寸227×227。
使用CNN模型进行训练,例如AlexNet,一般会略作简化,如下图: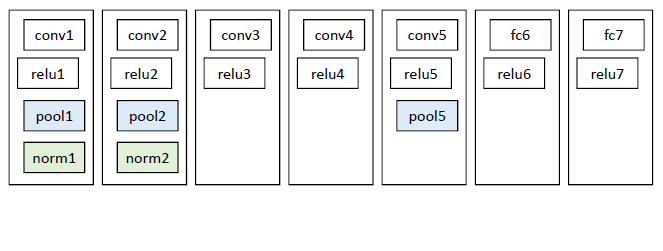
3、类别判断
对每一类目标,使用一个线性SVM二类分类器进行判别。输入为深度网络(如上图的AlexNet)输出的4096维特征,输出是否属于此类。
4、位置精修
目标检测的衡量标准是重叠面积:许多看似准确的检测结果,往往因为候选框不够准确,重叠面积很小,故需要一个位置精修步骤,对于每一个类,训练一个线性回归模型去判定这个框是否框得完美,如下图: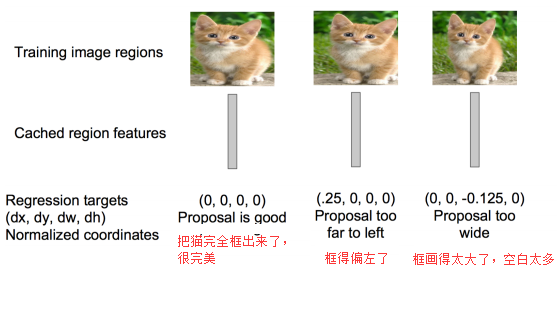
R-CNN将深度学习引入检测领域后,一举将PASCAL VOC上的检测率从35.1%提升到53.7%。
二、Fast R-CNN大幅提速
继2014年的R-CNN推出之后,Ross Girshick在2015年推出Fast R-CNN,构思精巧,流程更为紧凑,大幅提升了目标检测的速度。
Fast R-CNN和R-CNN相比,训练时间从84小时减少到9.5小时,测试时间从47秒减少到0.32秒,并且在PASCAL VOC 2007上测试的准确率相差无几,约在66%-67%之间。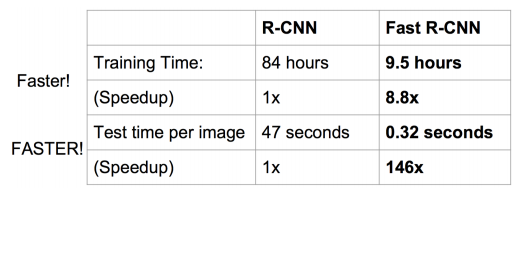
Fast R-CNN主要解决R-CNN的以下问题:
1、训练、测试时速度慢
R-CNN的一张图像内候选框之间存在大量重叠,提取特征操作冗余。而Fast R-CNN将整张图像归一化后直接送入深度网络,紧接着送入从这幅图像上提取出的候选区域。这些候选区域的前几层特征不需要再重复计算。
2、训练所需空间大
R-CNN中独立的分类器和回归器需要大量特征作为训练样本。Fast R-CNN把类别判断和位置精调统一用深度网络实现,不再需要额外存储。
下面进行详细介绍
1、在特征提取阶段,通过CNN(如AlexNet)中的conv、pooling、relu等操作都不需要固定大小尺寸的输入,因此,在原始图片上执行这些操作后,输入图片尺寸不同将会导致得到的feature map(特征图)尺寸也不同,这样就不能直接接到一个全连接层进行分类。
在Fast R-CNN中,作者提出了一个叫做ROI Pooling的网络层,这个网络层可以把不同大小的输入映射到一个固定尺度的特征向量。ROI Pooling层将每个候选区域均匀分成M×N块,对每块进行max pooling。将特征图上大小不一的候选区域转变为大小统一的数据,送入下一层。这样虽然输入的图片尺寸不同,得到的feature map(特征图)尺寸也不同,但是可以加入这个神奇的ROI Pooling层,对每个region都提取一个固定维度的特征表示,就可再通过正常的softmax进行类型识别。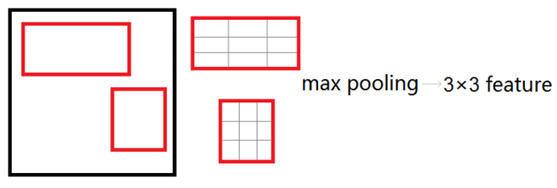
2、在分类回归阶段,在R-CNN中,先生成候选框,然后再通过CNN提取特征,之后再用SVM分类,最后再做回归得到具体位置(bbox regression)。而在Fast R-CNN中,作者巧妙的把最后的bbox regression也放进了神经网络内部,与区域分类合并成为了一个multi-task模型,如下图所示: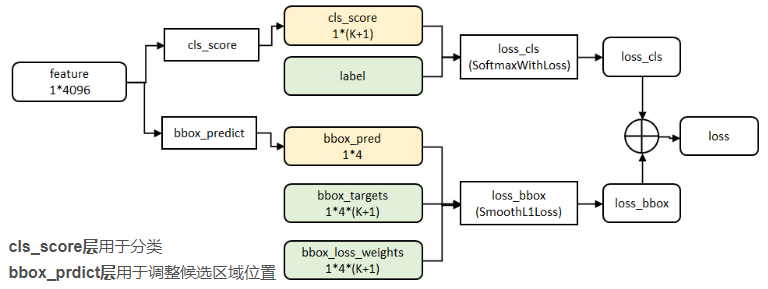
实验表明,这两个任务能够共享卷积特征,并且相互促进。
Fast R-CNN很重要的一个贡献是成功地让人们看到了Region Proposal+CNN(候选区域+卷积神经网络)这一框架实时检测的希望,原来多类检测真的可以在保证准确率的同时提升处理速度。
三、Faster R-CNN更快更强
继2014年推出R-CNN,2015年推出Fast R-CNN之后,目标检测界的领军人物Ross Girshick团队在2015年又推出一力作:Faster R-CNN,使简单网络目标检测速度达到17fps,在PASCAL VOC上准确率为59.9%,复杂网络达到5fps,准确率78.8%。
在Fast R-CNN还存在着瓶颈问题:Selective Search(选择性搜索)。要找出所有的候选框,这个也非常耗时。那我们有没有一个更加高效的方法来求出这些候选框呢?
在Faster R-CNN中加入一个提取边缘的神经网络,也就说找候选框的工作也交给神经网络来做了。这样,目标检测的四个基本步骤(候选区域生成,特征提取,分类,位置精修)终于被统一到一个深度网络框架之内。如下图所示: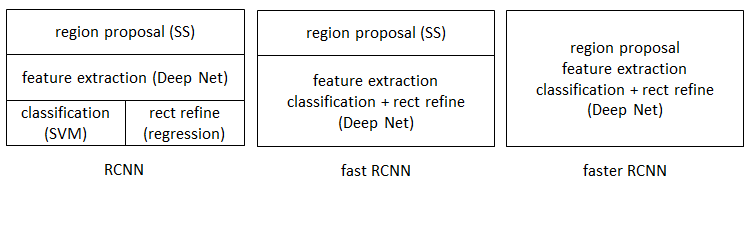
Faster R-CNN可以简单地看成是“区域生成网络+Fast R-CNN”的模型,用区域生成网络(Region Proposal Network,简称RPN)来代替Fast R-CNN中的Selective Search(选择性搜索)方法。
如下图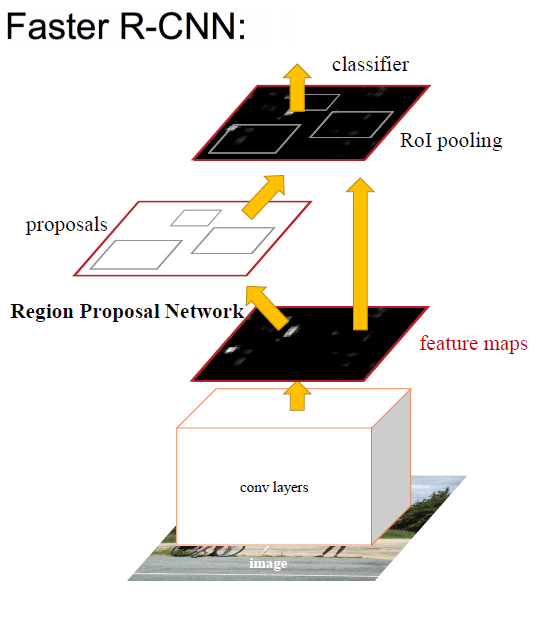
RPN如下图: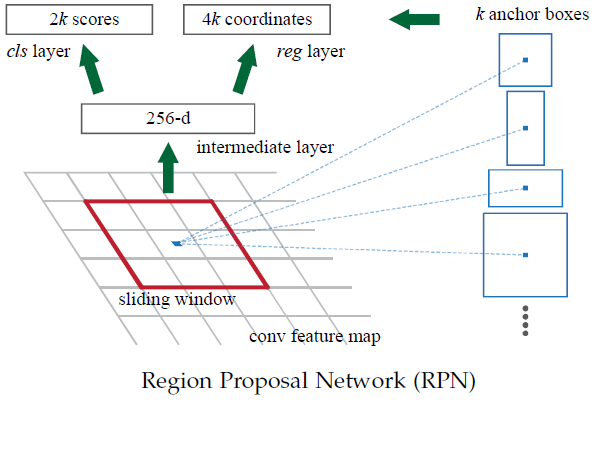
RPN的工作步骤如下:
- 在feature map(特征图)上滑动窗口
- 建一个神经网络用于物体分类+框位置的回归
- 滑动窗口的位置提供了物体的大体位置信息
- 框的回归提供了框更精确的位置
Faster R-CNN设计了提取候选区域的网络RPN,代替了费时的Selective Search(选择性搜索),使得检测速度大幅提升,下表对比了R-CNN、Fast R-CNN、Faster R-CNN的检测速度: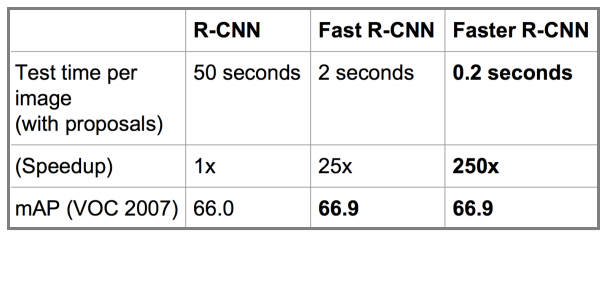
总结
R-CNN、Fast R-CNN、Faster R-CNN一路走来,基于深度学习目标检测的流程变得越来越精简、精度越来越高、速度也越来越快。基于region proposal(候选区域)的R-CNN系列目标检测方法是目标检测技术领域中的最主要分支之一。
最新文章
- 普通程序员如何转向AI方向
- Windows 7安装软件时无法将注册值写入注册表的处理方法
- Openssl生成证书三板斧
- 使用Tmux提高linux终端环境下的效率
- MYSQL开启慢查询日志实施
- 1、Hadoop的伪分布式部署
- QQ浏览器X5内核问题汇总
- Error parsing 'file:///media/RHEL_5.5\\ x86_64\\ DVD/Server'
- 每天一个linux命令--su
- 正确导入android-support-v4.jar的方法
- MySql 去重且指定某字段在前的排序方法
- 五指cms筛选功能的实现:
- Eclipse 从git导入maven多模块项目
- 云计算openstack共享组件(2)——Memcache 缓存系统
- python数学第三天【方向导数】
- 【运维】Dell R710如何开启VT服务
- JQuery进度条
- 最美应用API接口分析
- Objective-C和Swift混合编程开发
- Linux - Confluence搭建
热门文章
- php的yii框架开发总结4
- Kalman filter, Laser/Lidar measurement
- 504. Inverted Index (Map Reduce) lintcode
- 力不从心 Leetcode(ugly number heap) 263, 264,313
- 154. Find Minimum in Rotated Sorted Array II(Binary search)
- framework7滑动删除列表触发chrome 报错解决办法
- VedioCapture
- IntelliJ IDEA / Eclipse 自动生成 Author 注释 签名
- centos7 kvm安装使用
- 第44章 MPU6050传感器—姿态检测—零死角玩转STM32-F429系列