【RT-Thread笔记】IO设备模型及GPIO设备
RTT内核对象——设备
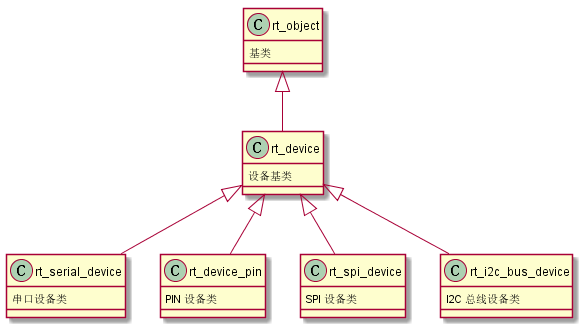
RT-Thread有多种内核对象,其中设备device就是其中一种。
内核继承关系图如下:

设备继承关系图如下:
device对象对应的结构体如下:

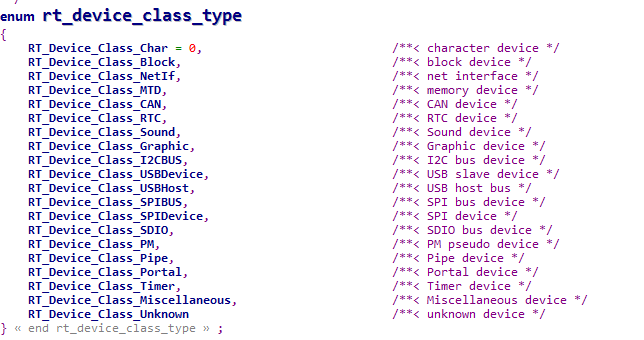
其中,设备类型type有如下几类:
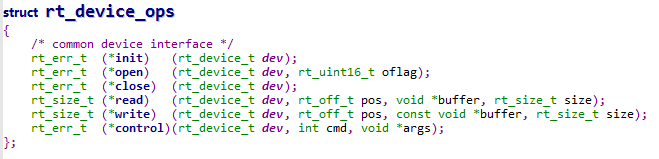
设备的操作方法结构体:
I/O设备模型框架
RT-Thread 提供了一套简单的 I/O 设备模型框架 :
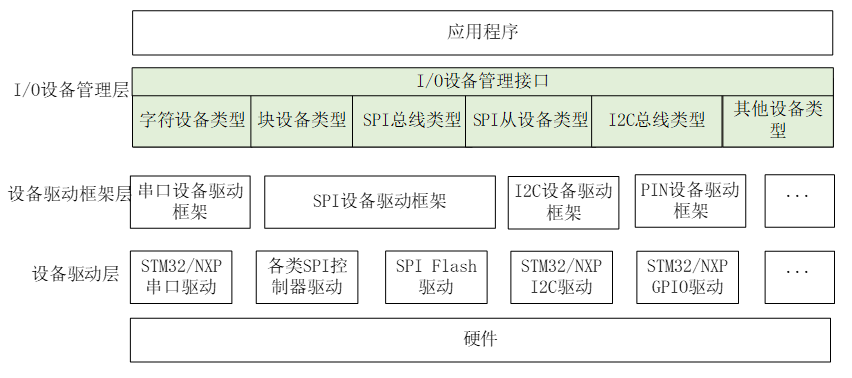
应用程序通过 I/O 设备管理接口获得正确的设备驱动,然后通过这个设备驱动与底层 I/O 硬件设备进行数据(或控制)交互。
I/O 设备管理层:实现了对设备驱动程序的封装。 设备驱动程序的升级、更替不会对上层应用产生影响, 从而降低了代码的耦合性、复杂性,提高了系统的可靠性。
设备驱动框架层: 对同类硬件设备驱动的抽象, 将不同厂家的同类硬件设备驱动中相同的部分抽取出来。
设备驱动层: 是一组驱使硬件设备工作的程序,实现访问硬件设备的功能。 这一层是与硬件有关的,不同的芯片的同种外设驱动是不同的,STM32的GPIO驱动与NXP的GPIO驱动是不同的。这一层负责创建与注册I/O设备,对于操作逻辑简单的设备,可以不经过设备驱动框架层。
设备的两种注册方式
1、 对于操作逻辑简单的设备,可以不经过设备驱动框架层,直接将设备注册到 I/O 设备管理器中:

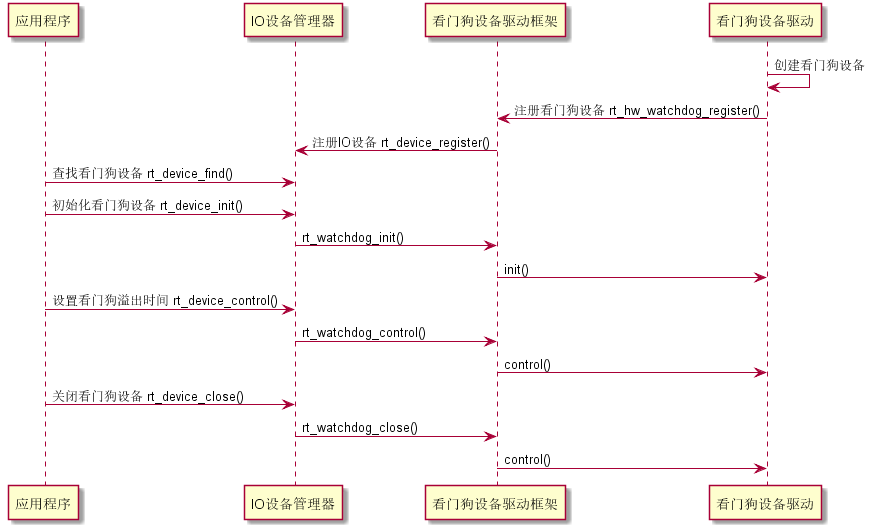
2、 对于另一些设备,如看门狗等,则会将创建的设备实例先注册到对应的设备驱动框架中,再由设备驱动框架向 I/O 设备管理器进行注册 :
I/O设备接口
1、创建及注册I/O设备
设备创建:

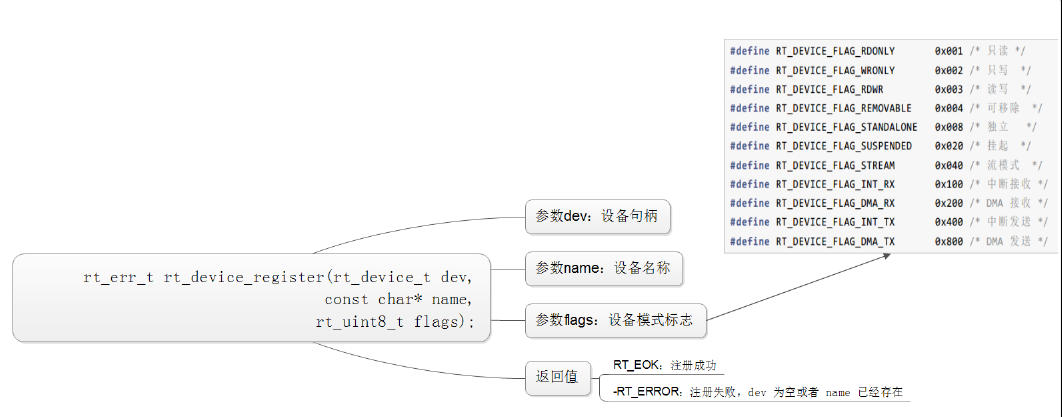
设备注册:
2、访问I/O设备
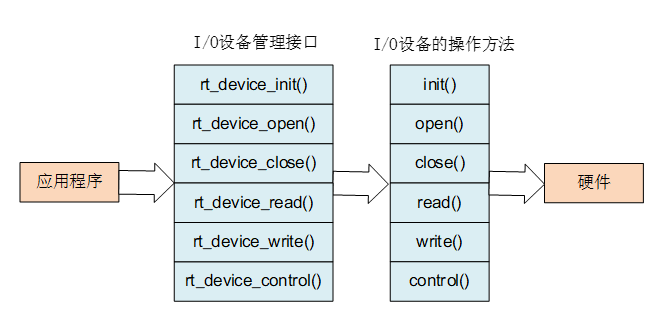
应用程序通过 I/O 设备管理接口来访问硬件设备,当设备驱动实现后,应用程序就可以访问该硬件。
I/O 设备管理接口与 I/O 设备的操作方法的映射关系下图所示:
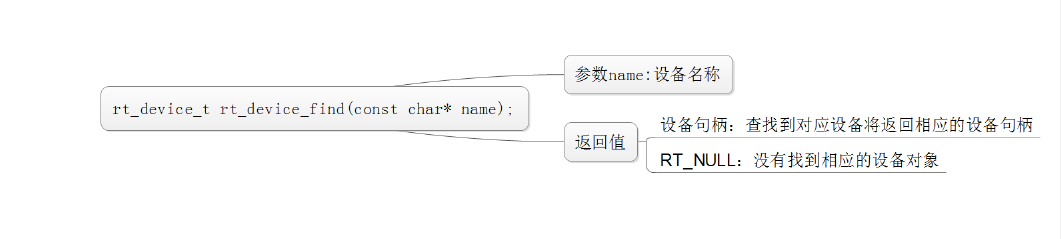
查找设备:
初始化设备:

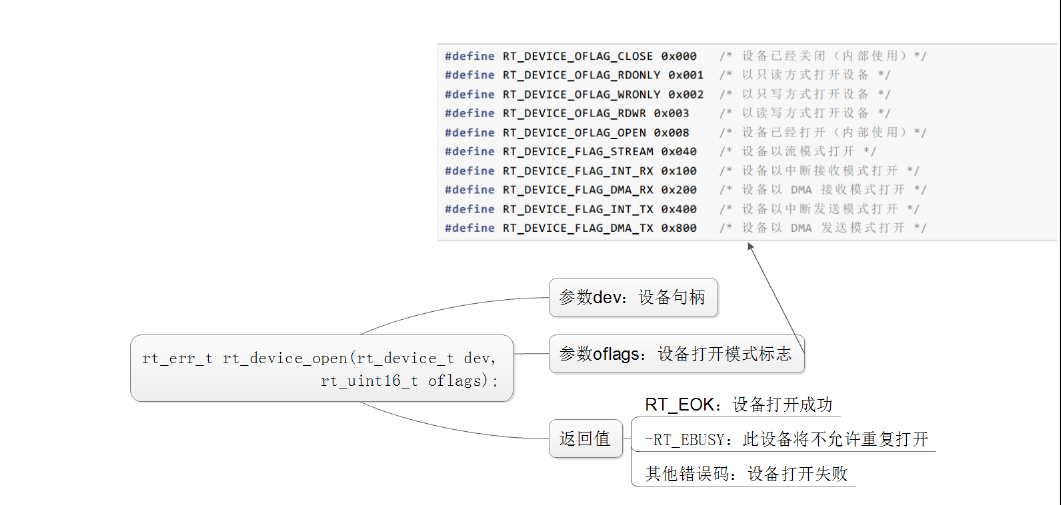
打开和关闭设备:

控制设备:

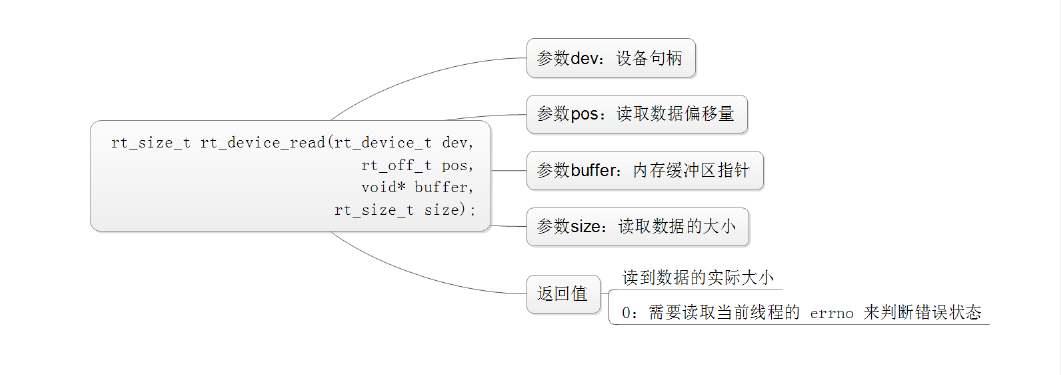
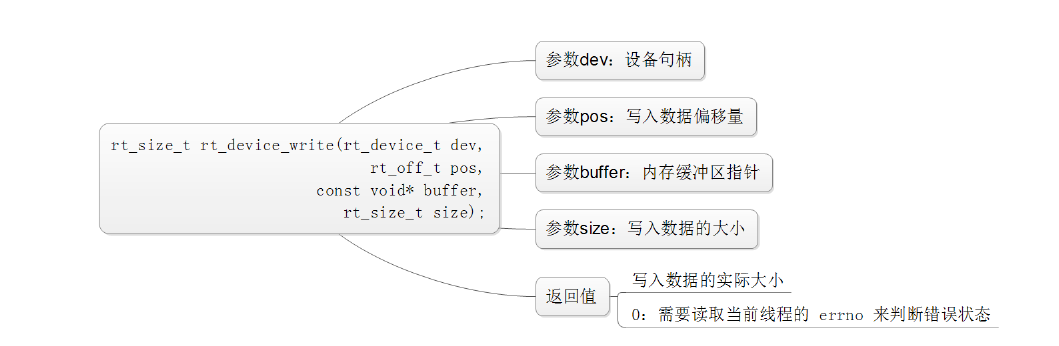
读写设备:
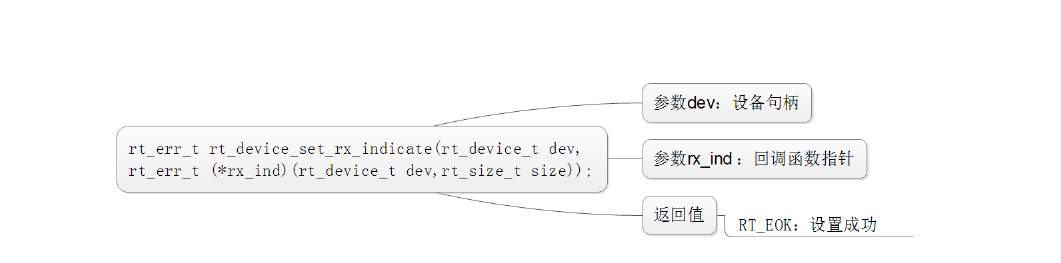
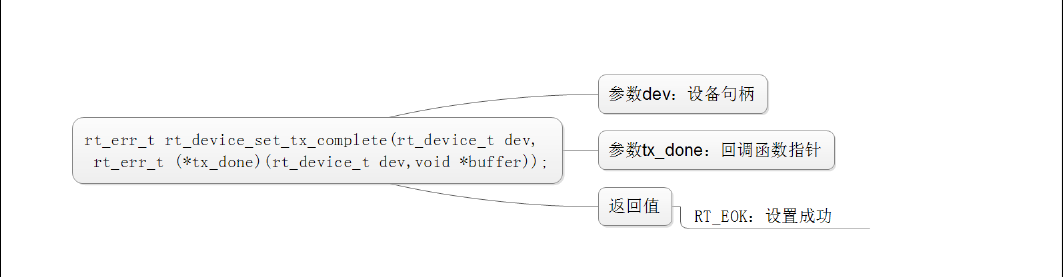
数据收发回调:
GPIO(PIN)设备模型
上面说的设备驱动层有两种注册设备的方式,对应的应用程序也有两种访问设备的方式。一种是通过设备操作接口访问,另一种是通过通用的设备驱动来访问。这里我们使用通用的GPIO设备驱动(对应源码:pin.c)来访问GPIO设备。其中通用的设备驱动在RT-Thread代码中作为一个组件,对应的路径为:
rt-thread\components\drivers
这个文件夹下有很多驱动框架:

我们用的GPIO(PIN)设备驱动pin.c存在于文件夹misc下。
GPIO输入输出实验(按键点灯):
创建一个pin线程:
按键按下LED被点亮,按键松开LED熄灭。
static void pin_thread_entry(void *parameter)
{
unsigned int count = 1;
/* 设置LED引脚为输出模式 */
rt_pin_mode(PIN_LED_R, PIN_MODE_OUTPUT);
/* 设置KEY0引脚为输入模式 */
rt_pin_mode(PIN_KEY0, PIN_MODE_INPUT);
while (count > 0)
{
/* 读取KEY0引脚状态 */
if (rt_pin_read(PIN_KEY0) == PIN_LOW)
{
rt_thread_mdelay(50);
if (rt_pin_read(PIN_KEY0) == PIN_LOW)
{
count++;
rt_kprintf("KEY0 pressed! LED ON! count = %d\n", count);
rt_pin_write(PIN_LED_R, PIN_LOW);
}
}
else
{
rt_pin_write(PIN_LED_R, PIN_HIGH);
}
rt_thread_mdelay(10);
}
}
int main(void)
{
/* 线程句柄定义 */
rt_thread_t tid;
/* 创建动态pin线程 :优先级 25 ,时间片 5个系统滴答,线程栈512字节 */
tid = rt_thread_create("pin_thread",
pin_thread_entry,
RT_NULL,
STACK_SIZE,
THREAD_PRIORITY,
TIMESLICE);
/* 创建成功则启动动态线程 */
if (tid != RT_NULL)
{
rt_thread_startup(tid);
}
return 0;
}
下载程序,在终端输入list_device命令:

可以看到device是pin,类型是Miscellaneous Device,说明我们正在使用通用的GPIO设备驱动。这个实验中有三个文件值得关注,分别是
device.c:设备管理层
pin.c:设备驱动框架层
drv_gpio.c:设备驱动层
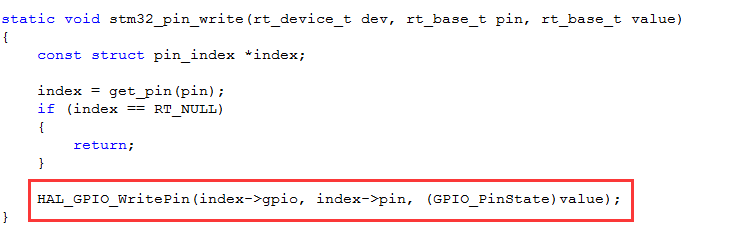
其中device.c与pin.c属于RT-Thread的范畴,drv_gpio.c与具体的硬件有关,这个文件里操控的就是与硬件有关的东西,如:
程序中用到的rt_pin_mode及rt_pin_write等都是PIN设备管理接口。PIN设备管理有如下几个接口:

设置引脚模式:
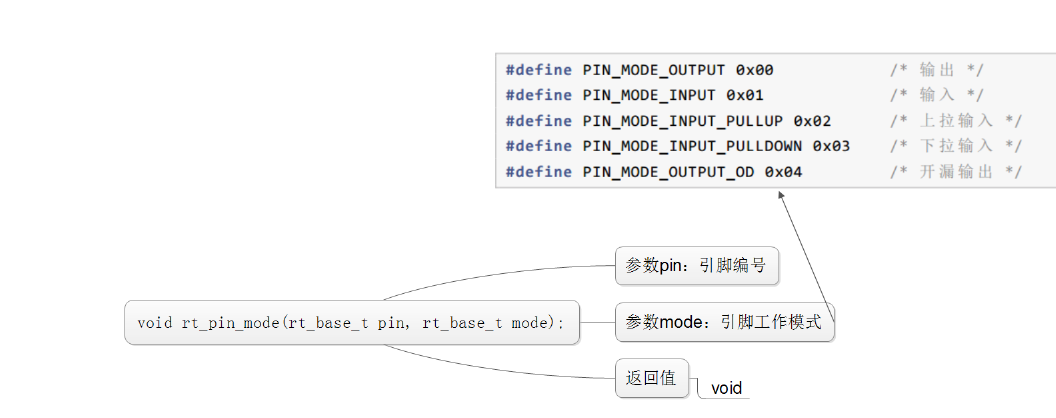
RT-Thread 提供的引脚编号需要和芯片的引脚号区分开来,它们并不是同一个概念,引脚编号由 PIN设备驱动程序定义,和具体的芯片相关。
设置引脚电平:

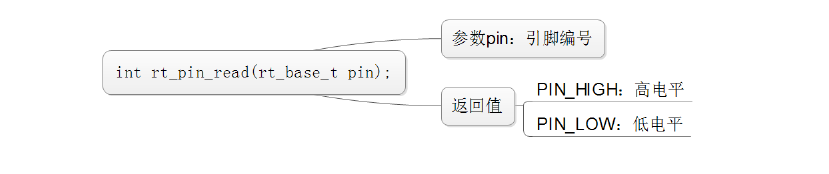
读取引脚电平:
绑定引脚中断回调函数:

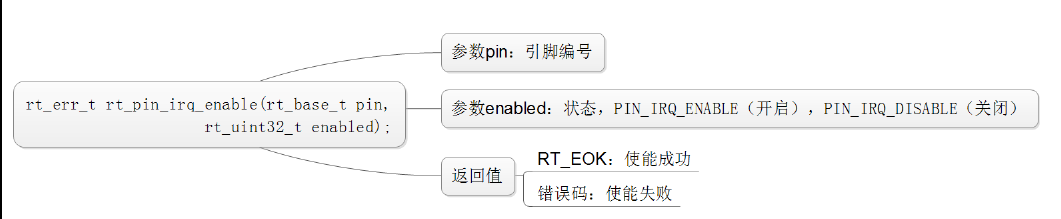
使能引脚中断:
脱离引脚中断回调函数:

以上就是本次的笔记,如有错误,欢迎指出。
我的个人博客:https://zhengnianli.github.io/
我的微信公众号:嵌入式大杂烩
最新文章
- CentOS 7 Git安装
- 使用jedis操作redis
- map创建JSONObject对象
- VC++ 控制外部程序,向外部程序发送一个消息的方法
- linux包的相关命令
- hadoop常用管理员命令
- Java学习笔记(二)UML基础
- Labview中创建属性节点和调用节点的用法
- 易买网(注册Ajax讲解)
- Java基础知识强化之集合框架笔记09:Collection集合迭代器使用的问题探讨
- UPS电源效果及有关名词解析
- android 自定义ScrollView实现背景图片伸缩(阻尼效果)
- Docker外部访问容器
- 关于配置ssh免密码登录后,仍提示输入密码
- CCF CSP 201312-1 出现次数最多的数
- springboot 学习之路 6(定时任务)
- BizTalk RosettaNet 配置导入与导出
- PPPoE图解
- Linux下安装jdk1.7
- javascript void函数