异步通知与异步I/O
2024-08-26 17:42:18
异步通知:很简单,一旦设备准备好,就主动通知应用程序,这种情况下应用程序就不需要查询设备状态,这是不是特像硬件上常提的“中断的概念”。上边比较准确的说法其实应该叫做“信号驱动的异步I/O”,信号是在软件层次上对中断机制的一种模拟。
阻塞I/O意味着一直等待设备可访问再访问,非阻塞I/O意味着使用poll()来查询是否可访问,而异步通知则意味着设备通知应用程序自身可访问。
上面三种方式,其实本身是没有优劣的,应该根据不同的应用场景合理选择罢了。
说到信号,在应用程序中,为了捕获信号(还捕获呢,不就是一个处理吗)可以使用signal()函数来设置对应的信号的处理函数。函数原型是void (*signal(int signo,void (*func)(int))) (int) 这个看起来费劲吧,不光你,我看着也费劲,没关系,给你来个例子:
void sigterm_handler(int signo) { char data[MAX_LEN]; int len; len=read(STDIN_FILENO, &data,MAX_LEN); data[len]=0; printf("Input available:%s\n",data); exit(0); } intmain(void) { int oflags; //启动信号驱动机制 signal(SIGIO, sigterm_handler);fcntl(STDIN_FILENO, F_SETOWN, getpid()); oflags = fcntl(STDIN_FILENO, F_GETFL);fcntl(STDIN_FILENO, F_SETFL, oflags | FASYNC); //建立一个死循环,防止程序结束 while(1);return 0; }
看了这段代码明白啥意思了吧,我也不多少了,咱们继续往下走..为了一个用户在用户空间中能处理一个设备释放的信号,它必须完成一下3份工作:
1)通过F_SETOWN控制指令设置设备文件的拥有者为本进程,这样从设备驱动中发出的信号才能被本进程收到。
2)通过F_SETFLIO控制命令设置设备文件支持FASYNC,即异步通知模式。
3)通过signal()链接信号和信号处理函数。
有了信号的发送,那么就一定得有信号的释放了:
在设备驱动和应用程序的异步通知交互中,仅仅在应用程序端捕获信号是不够的,因为信号没有的源头是在驱动端,因此要在适当的时机让设备驱动释放信号。
为了使设备支持异步通知机制,驱动程序中涉及三个操作:
1)支持F_SETOWN命令,能在这个控制命令处理中设置filp->f_owner为对应的进程ID。不过此项工作已由内核完成,设备驱动无须处理。
2)支持F_SETFL命令的处理,每当FASYNC标志改变时,驱动程序中fasync()函数将得以进行。因此,驱动程序必须实现fasync()函数。
3)在设备资源可获得时,调用kill_fasync()函数激发相应的信号。
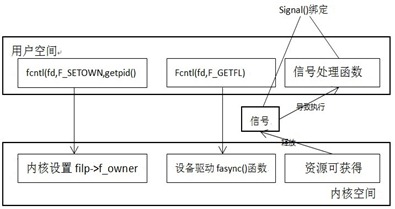
驱动程序中上面的三步是和应用程序是一一对应的。如下图:
设备驱动中异步通知编程还是比较简单的,主要就是一些数据结构,和两个函数:
数据结构:fasync_struct结构体
函数:
1)处理FASYNC标志变更的函数int fasync_helper(int fd, struct file *filp, int mode ,struct fasync_struct **fa);
2) 释放信号用的函数void kill_fasync(struct fasync_struct **fa, int sig, int band);
和其他设备驱动一样,一般将fasync_struct放到设备结构体中。下边是典型模版:
struct xxx_dev { struct cdev cdev; ... struct fasync_struct *async_queue; //异步结构体}
而在驱动的fasync()函数中,只需要简单的将该参数的3个参数以及fasync_struct结构体指针的指针作为第四个参数传给fasync_helper函数即可.下边是典型模版:
static int xxx_fasync(int fd, struct file *filp, int mode) { struct xxx_dev *dev = filp->private_data; return fasync_helper(fd,filp,mode,&dev->async_queue); } 一旦设备资源可以获得时,应该调用kill_fasync()释放SIGIO信号,可读时第三个参数设置为POLL_IN,可写时第三个参数设置为POLL_OUT,下边是释放信号的典型模版:
static ssize_t xxx_write(struct file *filp, const char __user *buf, size_t count,loff_t *f_ops) { struct xxx_dev *dev = filp->private_data; .... //产生异步信号if(dev->async_queue) { kill_fasync(&dev->async_queue, SIGIO, POLL_IN); } .. }
最后,在文件关闭时,即在设备驱动的release函数中,应调用设备驱动的fasync()函数将文件从异步通知的列表中删除,下边是设备驱动的释放函数的典型模版:
static int xxx_release(struct inode *inode, struct file *filp) { struct xxx_dev *dev = filp->private_data; //将文件从异步通知列表中删除 xxx_fasync(-1,filp,0); ... return 0; }
使用信号可以实现设备驱动与用户程序之间的异步通知,总体而言,设备驱动和用户空间要分别完成以下工作:用户空间设置文件的拥有者、FASYNC标志及捕获信号,内核空间响应对文件的拥有者、FASYNC标志的设置,并在资源可获得时释放信号。
Linux 2.6内核包含对AIO 的支持为用户空间提供统一的异步I/O 接口。在AIO中,信号和回调函数是实现内核空间对用户空间应用程序通知的两种机制。
最新文章
- 用angular怎么缓存父页面数据
- TortoiseGit:记住用户名和密码
- Using python to process Big Data
- MVC 修饰标签
- scala学习资料
- HDU 3853LOOPS(简单概率DP)
- 关于Ajax&初见Ajax
- Linux下的sudo及其配置文件/etc/sudoers的详细配置说明
- android studio sexy editor性感编辑器设置
- Kafka详细的设计和生态系统
- flask开发用户管理系统wtf版
- IntelliJ IDEA编辑器光标定位错误的问题!
- 图片上传组件webuploader
- Spring Boot+Jsp启动异常
- TypeScript 快速学习
- sed命令实现文件内容替换总结案例
- angular笔记_3
- Android Activity学习笔记——Activity的启动和创建
- 获取AFP服务信息
- RN 获取地理位置
热门文章
- Shell 概述、截取字符操作等
- yii2:模块
- Autolayout .Compact or .Regular [iPhone/iPad]
- uva-11020-平衡树
- tflearn kears GAN官方demo代码——本质上GAN是先训练判别模型让你能够识别噪声,然后生成模型基于噪声生成数据,目标是让判别模型出错。GAN的过程就是训练这个生成模型参数!!!
- [eShopOnContainers 学习系列] - 01 - Roadmap and Milestones for future releases
- 3个IO口8个按键
- bat中for /f 如何截取任意行
- nginx结合tomcat一起使用
- 【Android】Android 学习记录贴