第十二章节 BJROBOT 摄像头寻线 【ROS全开源阿克曼转向智能网联无人驾驶车】
2024-09-04 05:47:04
关于摄像头:普通摄像头, USB 免驱摄像头都可以使用。
1.如下图所示,用红色胶布在地板上贴一条线,小车摆放在线的一头处,让线在小车的中间位置,摄像头角度往下调整倾斜一点,好让摄像头识别到红线。注意:红线拐弯角度不能太急,地板最好不反光,地板的颜色和红色线对比度要高,识别效果才会更好。
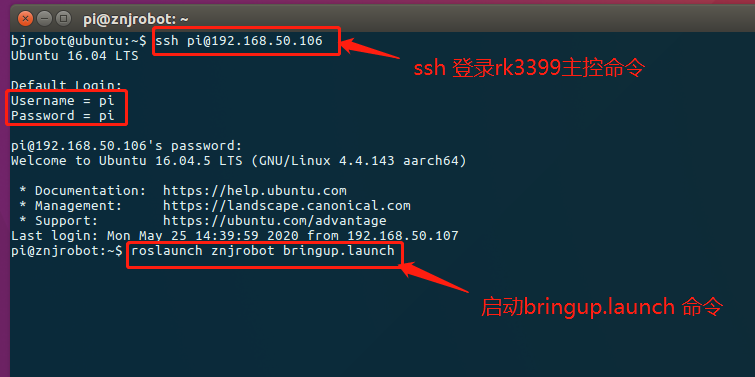
2.用资料里的虚拟机,打开一个终端 ssh 过去主控端启动roslaunch znjrobot bringup.launch。
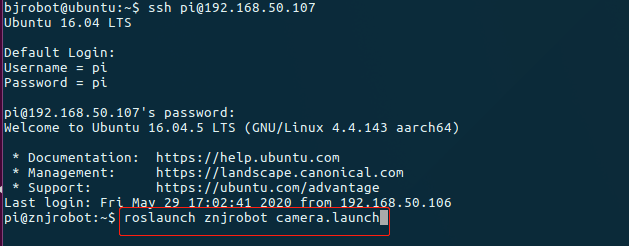
3.再打开一个终端。ssh 过去小车主控端,启动roslaunch znjrobot camera.launch 4.在虚拟机端,再打开一个终端,直接启动roslaunch znj_line_follower znj_line.launch。
5.此时观察弹出的 View 窗口,显示当前摄像头的捕获到的红色,小车沿着红线路径行走实现摄像头识别寻线。

最新文章
- for循环后面跟分号 - for (i = 0; i <= 3; i++);这不是错误语句
- gucci fake bags is usually really a sign of luxurious
- php中判断字符串是否全是中文或含有中文的实现代码
- LaTeX常用数学符号表示方法
- djngo快速实现--使用Bootstrap
- c++中头文件include规则浅析[译]
- crtmpserver流媒体服务器的介绍与搭建
- fstab的格式
- 网易云课堂_C语言程序设计进阶_第一周:数据类型:整数类型、浮点类型、枚举类型_1计算分数精确值
- memcached 实验论文
- ORDER BY RAND()
- Linux挖矿病毒 khugepageds详细解决步骤
- [Swift]LeetCode519. 随机翻转矩阵 | Random Flip Matrix
- 【转】Robot Framework用法总结
- 用TreeSet和Comparator给list集合元素去重
- ABP框架系列之四十三:(OData-Integration-OData集成)
- 移动端安卓手机不能识别border 0.5px解决方案
- LSTM(长短期记忆网络)及其tensorflow代码应用
- kubernetes-PetSet
- SPOJ - TSUM 母函数+FFT+容斥