8_LQR 控制器_状态空间系统Matlab/Simulink建模分析
2024-10-13 03:18:16
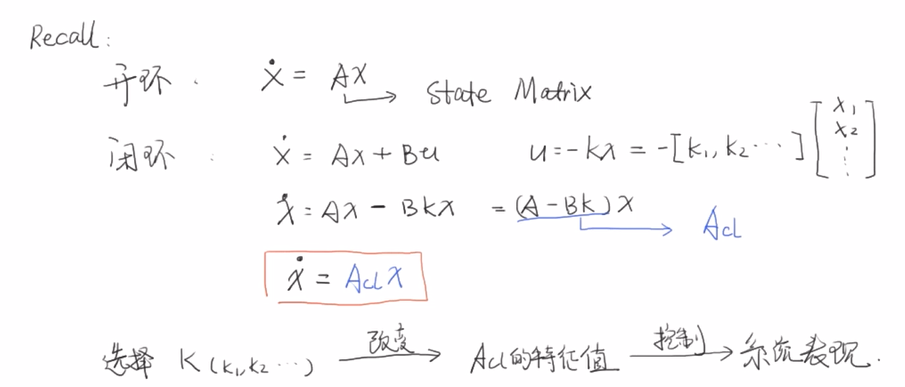
再线性控制器中讲到:

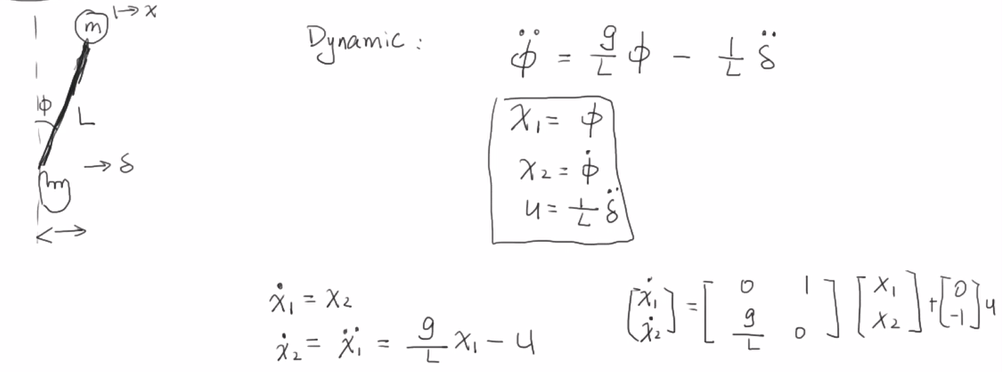
举例说明(线性控制器中的一个例子)博客中有说明
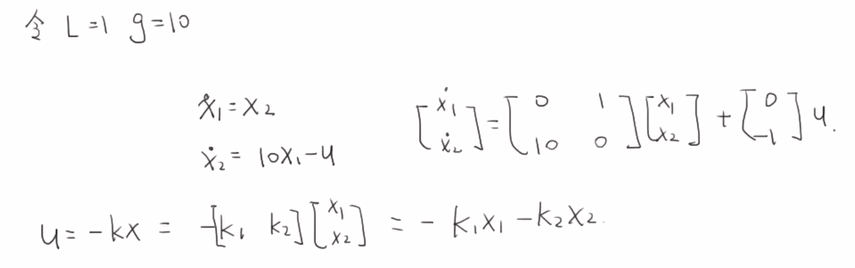
在matlab中:使用lqr求解K1、K2

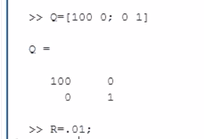
这里希望角度(即x1)能迅速变化,所以Q矩阵中Q11为100,并没有关心角速度(dot角度)变化的情况所以Q22为1,也不关心能量U的变化,所以R=0.01。
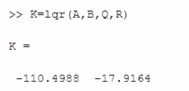
最终求解到K1 = -100.4988; K2 = -17.9164
根据系统的状态方程(在右侧已列出),在simulink中搭建模型:(将求解到的K1、K2写入到模型中的K1、 K2中)

从右往左看第一个积分1/s双击进入设置初始角度值(假如设成5),K1,K2带入lqr(A,B,Q,R)求得的值
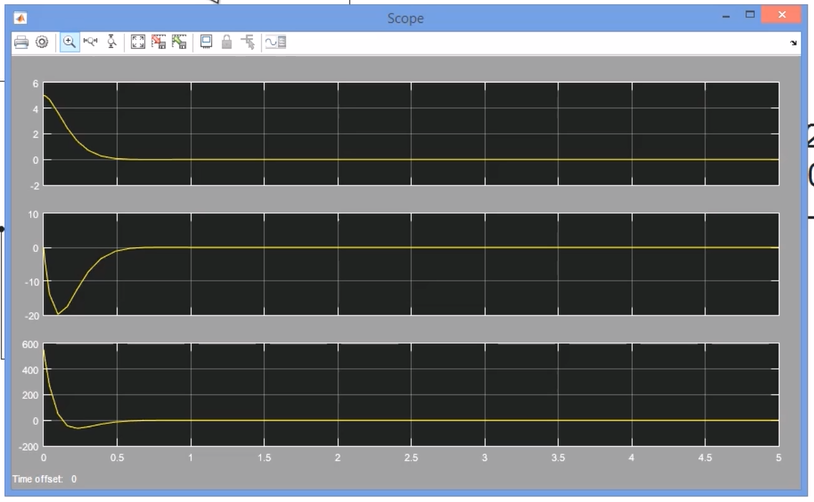
仿真结果:
相对当R值很大Q矩阵中的值小时,更关心能量的影响(R大时稳定所需要的能量小)
Q=[1, 0 ; 0 ,1]
R = 100;
自行去测试;最终两中情况的对比如下(紫色是R= 100的情况)

最下面是能量的曲线,可以发现能量消耗要比之前低得多。
最上面的是角度变化曲线,相比于第一种,角度变化到稳定时刻要慢一些。
最新文章
- [原创]Linux-day1
- iOS开发系列--C语言之构造类型
- MySQL中tinytext、text、mediumtext和longtext详解
- 使用UDP协议与韩国OACIS压机通讯
- gradle基础的build文件模板_jetty
- 使用Chef管理windows集群 | 运维自动化工具
- HTML5 文件API(二)
- [转] 设计模式 -- Facade
- iostream.h 和stdio.h区别
- 欧几里得算法求最大公约数(gcd)
- ASP.NET CORE部署到Linux
- 二叉树终极教程--BinarySearchTree
- 洛谷P1072Hankson的趣味题题解
- .NET中的泛型集合总结
- 列举spark所有算子
- IntelliJ IDE 常用配置
- package-lock.json和package.json的作用
- js - 伪数组转化为数组的几种方法整理(更新中...)
- Linux下的at定时执行任务命令详解
- 转载《Oracle的tnsnames.ora配置(PLSQL Developer)》