nao机器人使用手册
简单使用和保养
开关机和马达
开机是按一下,后来按一下相当于重启了一次程序,3是播报IP地址,5秒是关机,8秒是强制关机。
电池
3月左右不用需要取下电池。夏天5-8小时,冬天8-10小时充电。活动时间1-1.5小时。
下载
https://developer.softbankrobotics.com/nao6/downloads/nao6-downloads-windows
缺乏VCOMP120.DLL
实际上是缺乏32位VCOMP120.DLL文件。因为vc++2008 32位安装之后只有VCOMP100.DLL和VCOMP140.DLL,可能VCOMP120.DLL被淘汰了。Choregraphe是32位的程序。
我的轻薄办公本不可以运行,游戏笔记本反而可以运行。说明还是环境的问题。游戏笔记本环境配置齐全
Choregraphe-bin.exe – Missing Files error fix
开发文档
http://doc.aldebaran.com/2-8/index_dev_guide.html
两种编程方式
Choregraphe盒子编程
可视化编程教程
https://www.bilibili.com/video/BV18s411B7cN?p=7&spm_id_from=pageDriver
其实很不方便,时间轴动作难以使用。除非用来编舞等过于复杂的持续动作规划。复杂的连接线也许让人眼花缭乱。计算机程序员不建议使用,仅仅用于测试。
Choregraphe盒子中内嵌python代码
有没有感觉和arduino和unity3d相似啊,这些触发式的程序大同小异。所以有句话叫if语句能完成所有的编程语句。
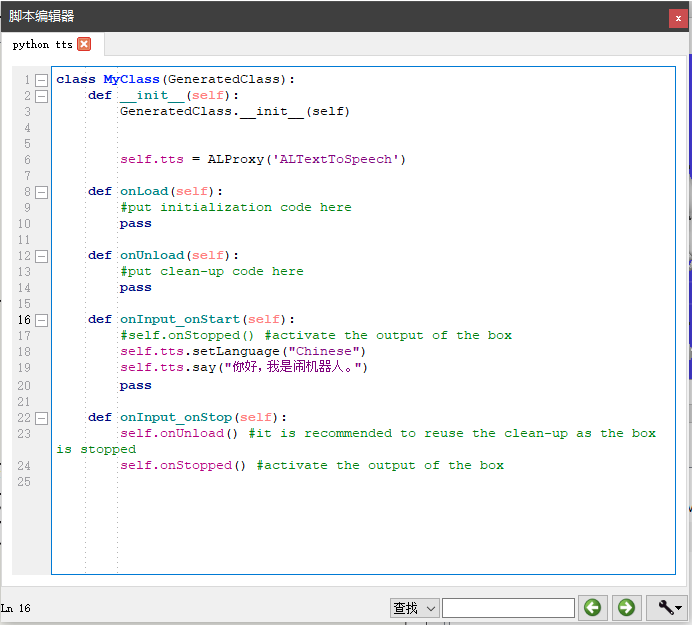
http://doc.aldebaran.com/2-8/getting_started/helloworld_choregraphe_script.html
http://doc.aldebaran.com/2-1/software/choregraphe/objects/python_script.html
python代码
官方教程
语音合成
http://doc.aldebaran.com/2-1/naoqi/audio/altexttospeech-tuto.html
动作运动
http://doc.aldebaran.com/2-1/dev/python/examples/motion/index.html
似乎NAO自带了动作防止摔系统限制了输入动作序列的执行。
模拟器
Choregraphe 自带模拟器
可以局域网下跨电脑连接虚拟机器人。但是不支持OpenRoberta下载并写入虚拟机器人文件
webot
http://doc.aldebaran.com/2-1/software/webots/webots_index.html#getting-started
v-rep
一个别人设置好的模拟器,似乎Choregraphe 会争用端口。
https://github.com/PierreJac/Project-NAO-Control
舞蹈下载
https://funlab.nd.edu/the-nao-base/special-movements/
相关研究
OpenRoberta
图形化编程输出python写入NAO机器人
https://github.com/OpenRoberta?page=1
使用Open Roberta Connector建立OpenRoberta编辑器网页和本地机器人的连接,不要手动输入IP地址和端口,点击scan自动检测。因为外网出口IP和本地局域网不一样,尚不知道真正IP和端口。
后记
很多人说NAO机器人没什么用,我也这么认为。但是我很讨厌现在互联网中外行人的狂热和嫌弃。刚开始这些外行商人疯狂吹捧,过两年又唾弃嫌弃。
每种技术有其技术价值。计算机科学和技术犹如变魔术。不在于工具,而在于idea和组合,相互掩护技术缺点,发挥技术优点。
对于先入手ROS的玩家来说,虽然NAO很垃圾。但是勉勉强强也又些价值。
优点
NAOqi作为和ROS有些相似的通信架构,具有参考价值,也许以后能对我开发C#版本的类似架构产生灵感。C# core和C++等底层相关交互性更好。
NAO提供了语音相关的API,不用单独维护语音相关API,简化了框架搭建的细节。反正学校一般会购买全套的NAO应用。但是遗憾也在这里,因为昂贵无法改装,安装深度相机。
NAO可以通过中间件和ROS通信,可以进行ROS相关开发。
缺点
NAO虽然提供了灵活关节,但是没有深度相机和激光雷达。另外因为学校购买的原因,无法进行改装,在头顶安装深度相机。
NAO提供的两个摄像头无法和通用的基于深度相机的视觉slam开发相兼容。也就是说即使你花心思玩出了一些花样,也无法和主流社区兼容和迁移。
所以也就只能跳跳舞了。。。令人绝望的现实。。。
NAO价格昂贵却又不值得,很多学校维护不起队伍。借入借出大家都很小心。推荐大家还是玩模拟器吧
项目地址
最新文章
- phpstudy 80端口被占用,修改端口
- RPC 的概念模型与实现解析
- Makefile 编写 tips
- Computer Vision 学习 -- 图像存储格式
- "Unity测试系列"文章索引
- android使用其他应用打开文件
- Hive[4] 数据定义 HiveQL
- 省市区(县)三级联动代码(js 数据源)
- TreeView递归取值
- PHPMailer发匿名邮件及Extension missing: openssl的解决
- UNIX Filesystems - Evolution Design and Implementation.pdf
- logstash 处理tomcat日志
- interview collect
- AngularJS Front-End App with Cloud Storage Tutorial Part 1: Building a Minimal App in Seven Steps
- 20164305 徐广皓 Exp2 后门原理与实践
- NOIP2009 t3 最优贸易
- 时间Date.js
- Python:Day51 web框架
- 【转】【Linux】Linux下统计当前文件夹下的文件个数、目录个数
- golang学习笔记15 golang用strings.Split切割字符串
热门文章
- 200行代码理解Asp.Net Core
- centos7使用Dockerfile运行mysql库并初始化数据
- 【LeetCode】1014. Capacity To Ship Packages Within D Days 解题报告(Python)
- 【LeetCode】760. Find Anagram Mappings 解题报告
- 【LeetCode】598. Range Addition II 解题报告(Python)
- 【LeetCode】802. Find Eventual Safe States 解题报告(Python)
- A. Lorenzo Von Matterhorn
- 涛思数据 TDengine集群搭建
- TCP/IP协议竟然有这么多漏洞
- Android物联网应用程序开发(智慧城市)—— 购物信息的存储界面开发