Kinect For Windows V2开发日志九:侦测并绘制人体骨架
2024-10-11 08:28:03
# 简介
在上一篇[《侦测、追踪人体骨架》](http://www.cnblogs.com/xz816111/p/5187424.html)里,介绍了关节点的使用办法,这一篇记录将关节点与`OpenCV`结合的绘图方法。
代码
#include <iostream>
#include <opencv2\imgproc.hpp>
#include <opencv2\calib3d.hpp>
#include <opencv2\highgui.hpp>
#include <Kinect.h>
using namespace std;
using namespace cv;
void draw(Mat & img, Joint & r_1, Joint & r_2, ICoordinateMapper * myMapper);
int main(void)
{
IKinectSensor * mySensor = nullptr;
GetDefaultKinectSensor(&mySensor);
mySensor->Open();
IColorFrameSource * myColorSource = nullptr;
mySensor->get_ColorFrameSource(&myColorSource);
IColorFrameReader * myColorReader = nullptr;
myColorSource->OpenReader(&myColorReader);
int colorHeight = 0, colorWidth = 0;
IFrameDescription * myDescription = nullptr;
myColorSource->get_FrameDescription(&myDescription);
myDescription->get_Height(&colorHeight);
myDescription->get_Width(&colorWidth);
IColorFrame * myColorFrame = nullptr;
Mat original(colorHeight, colorWidth, CV_8UC4);
//**********************以上为ColorFrame的读取前准备**************************
IBodyFrameSource * myBodySource = nullptr;
mySensor->get_BodyFrameSource(&myBodySource);
IBodyFrameReader * myBodyReader = nullptr;
myBodySource->OpenReader(&myBodyReader);
int myBodyCount = 0;
myBodySource->get_BodyCount(&myBodyCount);
IBodyFrame * myBodyFrame = nullptr;
ICoordinateMapper * myMapper = nullptr;
mySensor->get_CoordinateMapper(&myMapper);
//**********************以上为BodyFrame以及Mapper的准备***********************
while (1)
{
while (myColorReader->AcquireLatestFrame(&myColorFrame) != S_OK);
myColorFrame->CopyConvertedFrameDataToArray(colorHeight * colorWidth * 4, original.data, ColorImageFormat_Bgra);
Mat copy = original.clone(); //读取彩色图像并输出到矩阵
while (myBodyReader->AcquireLatestFrame(&myBodyFrame) != S_OK); //读取身体图像
IBody ** myBodyArr = new IBody *[myBodyCount]; //为存身体数据的数组做准备
for (int i = 0; i < myBodyCount; i++)
myBodyArr[i] = nullptr;
if (myBodyFrame->GetAndRefreshBodyData(myBodyCount, myBodyArr) == S_OK) //把身体数据输入数组
for (int i = 0; i < myBodyCount; i++)
{
BOOLEAN result = false;
if (myBodyArr[i]->get_IsTracked(&result) == S_OK && result) //先判断是否侦测到
{
Joint myJointArr[JointType_Count];
if (myBodyArr[i]->GetJoints(JointType_Count, myJointArr) == S_OK) //如果侦测到就把关节数据输入到数组并画图
{
draw(copy, myJointArr[JointType_Head], myJointArr[JointType_Neck], myMapper);
draw(copy, myJointArr[JointType_Neck], myJointArr[JointType_SpineShoulder], myMapper);
draw(copy, myJointArr[JointType_SpineShoulder], myJointArr[JointType_ShoulderLeft], myMapper);
draw(copy, myJointArr[JointType_SpineShoulder], myJointArr[JointType_SpineMid], myMapper);
draw(copy, myJointArr[JointType_SpineShoulder], myJointArr[JointType_ShoulderRight], myMapper);
draw(copy, myJointArr[JointType_ShoulderLeft], myJointArr[JointType_ElbowLeft], myMapper);
draw(copy, myJointArr[JointType_SpineMid], myJointArr[JointType_SpineBase], myMapper);
draw(copy, myJointArr[JointType_ShoulderRight], myJointArr[JointType_ElbowRight], myMapper);
draw(copy, myJointArr[JointType_ElbowLeft], myJointArr[JointType_WristLeft], myMapper);
draw(copy, myJointArr[JointType_SpineBase], myJointArr[JointType_HipLeft], myMapper);
draw(copy, myJointArr[JointType_SpineBase], myJointArr[JointType_HipRight], myMapper);
draw(copy, myJointArr[JointType_ElbowRight], myJointArr[JointType_WristRight], myMapper);
draw(copy, myJointArr[JointType_WristLeft], myJointArr[JointType_ThumbLeft], myMapper);
draw(copy, myJointArr[JointType_WristLeft], myJointArr[JointType_HandLeft], myMapper);
draw(copy, myJointArr[JointType_HipLeft], myJointArr[JointType_KneeLeft], myMapper);
draw(copy, myJointArr[JointType_HipRight], myJointArr[JointType_KneeRight], myMapper);
draw(copy, myJointArr[JointType_WristRight], myJointArr[JointType_ThumbRight], myMapper);
draw(copy, myJointArr[JointType_WristRight], myJointArr[JointType_HandRight], myMapper);
draw(copy, myJointArr[JointType_HandLeft], myJointArr[JointType_HandTipLeft], myMapper);
draw(copy, myJointArr[JointType_KneeLeft], myJointArr[JointType_FootLeft], myMapper);
draw(copy, myJointArr[JointType_KneeRight], myJointArr[JointType_FootRight], myMapper);
draw(copy, myJointArr[JointType_HandRight], myJointArr[JointType_HandTipRight], myMapper);
}
}
}
delete[]myBodyArr;
myBodyFrame->Release();
myColorFrame->Release();
imshow("TEST", copy);
if (waitKey(30) == VK_ESCAPE)
break;
}
myMapper->Release();
myDescription->Release();
myColorReader->Release();
myColorSource->Release();
myBodyReader->Release();
myBodySource->Release();
mySensor->Close();
mySensor->Release();
return 0;
}
void draw(Mat & img, Joint & r_1, Joint & r_2, ICoordinateMapper * myMapper)
{
//用两个关节点来做线段的两端,并且进行状态过滤
if (r_1.TrackingState == TrackingState_Tracked && r_2.TrackingState == TrackingState_Tracked)
{
ColorSpacePoint t_point; //要把关节点用的摄像机坐标下的点转换成彩色空间的点
Point p_1, p_2;
myMapper->MapCameraPointToColorSpace(r_1.Position, &t_point);
p_1.x = t_point.X;
p_1.y = t_point.Y;
myMapper->MapCameraPointToColorSpace(r_2.Position, &t_point);
p_2.x = t_point.X;
p_2.y = t_point.Y;
line(img, p_1, p_2, Vec3b(0, 255, 0), 5);
circle(img, p_1, 10, Vec3b(255, 0, 0), -1);
circle(img, p_2, 10, Vec3b(255, 0, 0), -1);
}
}
详细说明
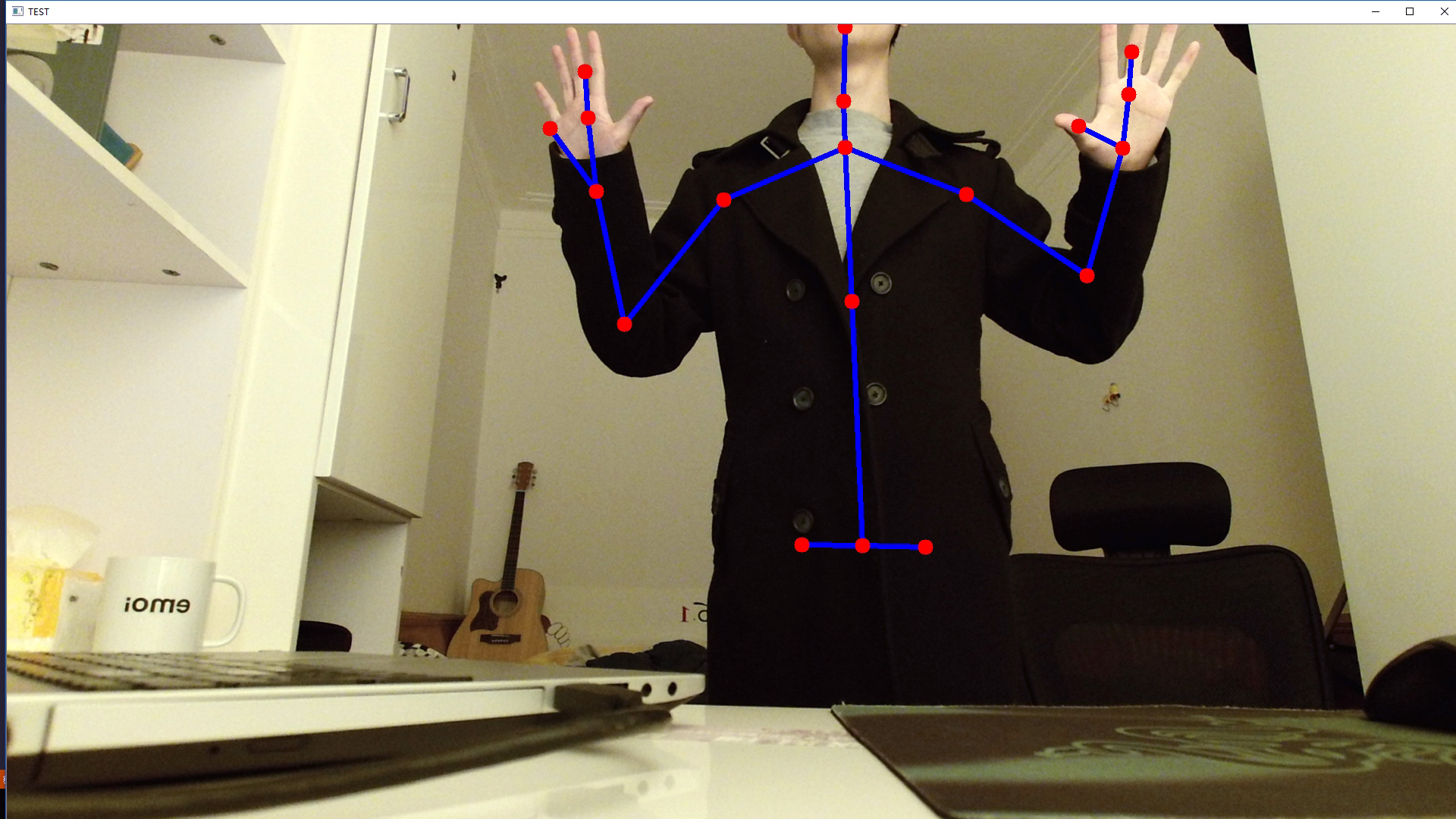
不难发现代码跟前面一篇非常类似,不同的地方就在于绘图部分。首先要将关节点用的CameraSpace转换到ColorSpace,这一操作可以借助ICoordinateMapper完成,然后就用两个关节点来作为线段的两端画线。这里采用了广度优先的办法,从上到下一层一层选取关节点。
效果图
最新文章
- LeetCode House Robber III
- Python中MySQLdb模块的安装
- java集合类的学习(二)
- log file switch (checkpoint incomplete)
- ServletContext2
- ORACLE 更新关联多张表
- jQuery按钮复制文本内容
- Spring配置文件模板
- Eclipse添加和查看书签
- Loadrunner脚本录制注意事项(七)
- eclipse 项目引入第三方jar包 3种方法
- 高并发WEB网站优化方案
- CopyOnWriteArrayList源码解析
- min_25筛
- 中文乱码总结之JSP乱码
- 为什么做java开发的公司需要那么多程序员?
- 纯手工编写的PE可执行程序
- 高质量PHP代码的50个实用技巧:非常值得收藏
- appium API接口
- python删除列表元素remove,pop,del
热门文章
- android获取手机的所有通讯录的号码和sim卡号码
- 转载:你可能没注意的CSS单位
- Java工具类 Apache Commons:commons-lang
- Oracle和plsql developer编码设置
- <meta http-equiv = "X-UA-Compatible" cotent = "IE=edge,chrome=1"/>
- JDK - Tomcat - Eclipse - JSP - Servlet 配置运行全攻略
- 浅析jQuery框架与构造对象
- 实战项目:通过当当API将订单抓取到SAP(一)
- PHP对大小写敏感问题的处理比较乱,写代码时可能偶尔出问题,所以这里总结一下。以便用到的出现错误
- 【JS】defer / async