OpenCV2马拉松第5圈——线性滤波
收入囊中
Vision: Algorithms and ApplicationsのImage processing中都有讲过
- 相关和卷积工作原理
- 边界处理
- 滤波器的工作原理
- 会使用均值滤波,高斯滤波
- 使用自己创造的核函数进行双线性滤波
- 可分离的滤波(加速)
葵花宝典
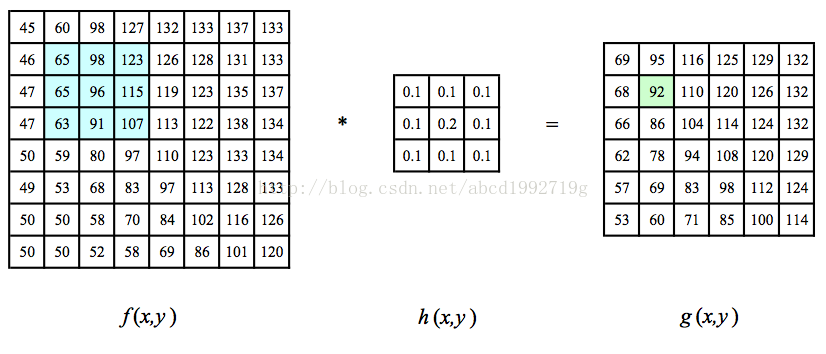
 与数据列表的卷积.
与数据列表的卷积.



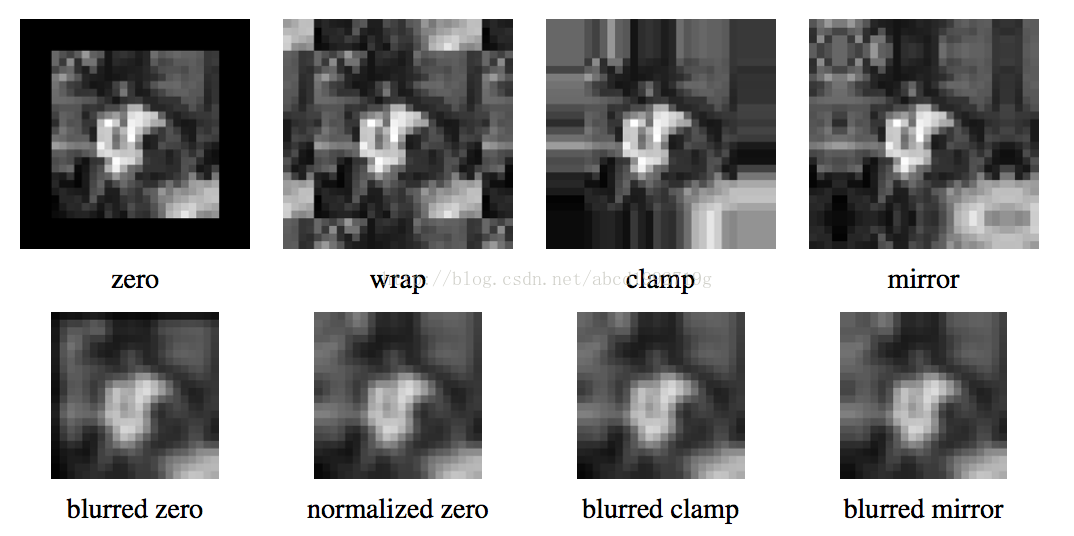
- 0填充。非常easy的处理方式
- 常数填充
- 夹取填塞(clamp),不断地复制边缘像素的值
- 重叠填塞(wrap),以环状形态围绕图像进行循环
- 镜像填塞(mirror),像素围绕图像边界进行镜像反射
- 延长(extend)。通过在边缘像素值中减去镜像信号的方式延长信号
/*
Various border types, image boundaries are denoted with '|' * BORDER_REPLICATE: aaaaaa|abcdefgh|hhhhhhh
* BORDER_REFLECT: fedcba|abcdefgh|hgfedcb
* BORDER_REFLECT_101: gfedcb|abcdefgh|gfedcba
* BORDER_WRAP: cdefgh|abcdefgh|abcdefg
* BORDER_CONSTANT: iiiiii|abcdefgh|iiiiiii with some specified 'i'
*/
watermark/2/text/aHR0cDovL2Jsb2cuY3Nkbi5uZXQvYWJjZDE5OTI3MTln/font/5a6L5L2T/fontsize/400/fill/I0JBQkFCMA==/dissolve/70/gravity/Center" alt="" />
初识API
-
C++: void blur(InputArray src,
OutputArray dst, Size ksize, Point anchor=Point(-1,-1), int borderType=BORDER_DEFAULT )
-
- src – 原始图像
- dst – 输出图像
- ksize – 核函数大小
- anchor – 锚点,普通情况下默觉得(-1,-1)。意味着在中心进行卷积
- borderType – 边界类型
The function smoothes an image using the kernel:

高斯滤波。对去除正态分布的噪声非常实用
-
C++: void GaussianBlur(InputArray src,
OutputArray dst, Size ksize, double sigmaX, double sigmaY=0, int borderType=BORDER_DEFAULT )
-
- src – 输入图像
- dst – 输出图像
- ksize – 核大小
- sigmaX – 控制幅度的參数(大家应该都学过或看过高斯函数吧,比方在正态分布中),假设sigmaX,sigmaY都为0,则由核的高度宽度自己计算
- sigmaY – 二维高斯函数有两个方向能够控制幅度。或这个不设置则和X一样
- borderType – 边界类型
用自己的核函数进行滤波
-
C++: void filter2D(InputArray src,
OutputArray dst, int ddepth, InputArray kernel, Point anchor=Point(-1,-1), double delta=0, intborderType=BORDER_DEFAULT )
-
- src – 输入图像.
- dst – 输出图像.
- depth – ddepth=-1,输出图像具有和输入图像一样的depth
- kernel – 核函数,单通道浮点矩阵
- anchor – 同之前
- delta – 可选,直接加到输出图像
- borderType – 边界类型
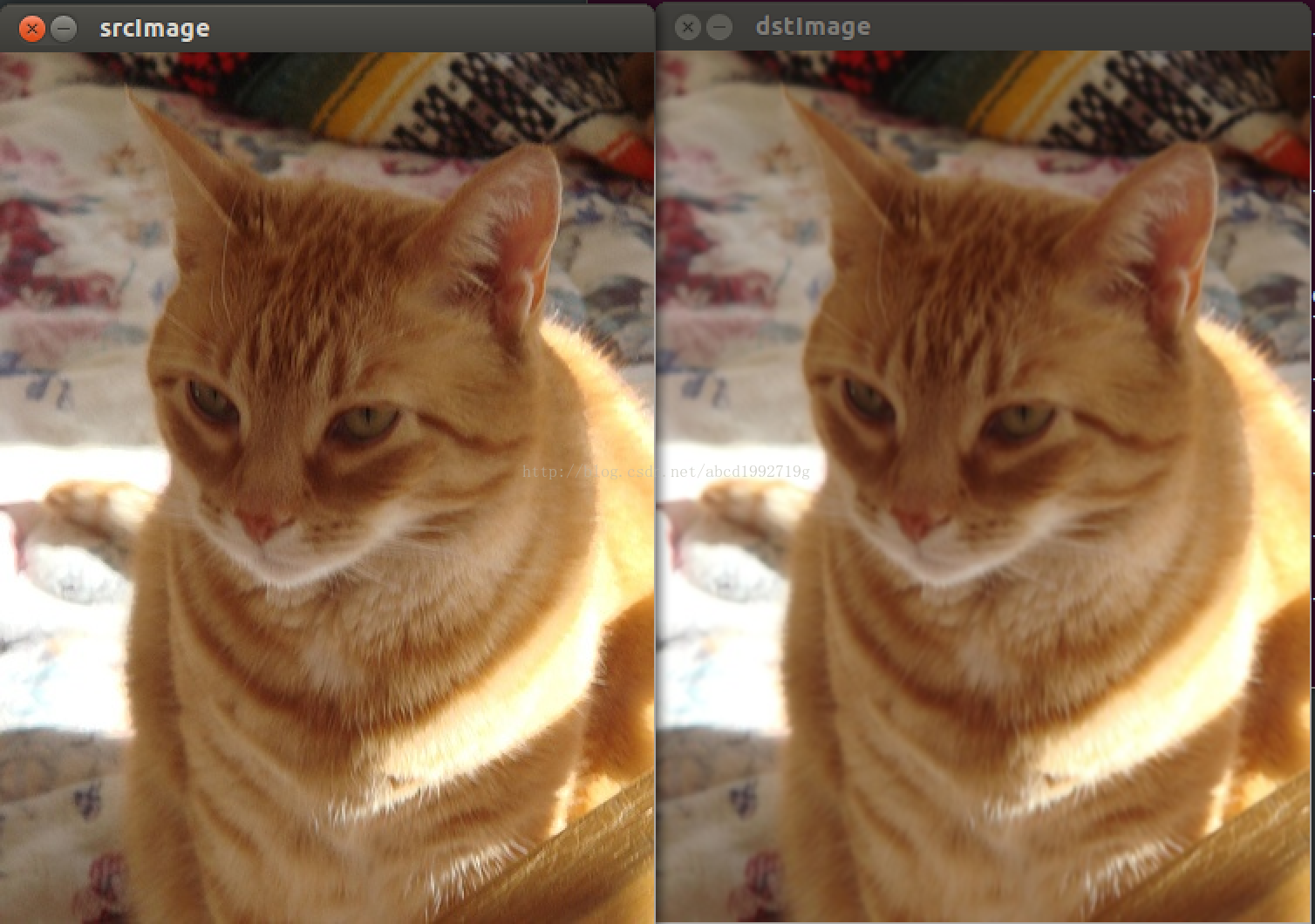
荷枪实弹
watermark/2/text/aHR0cDovL2Jsb2cuY3Nkbi5uZXQvYWJjZDE5OTI3MTln/font/5a6L5L2T/fontsize/400/fill/I0JBQkFCMA==/dissolve/70/gravity/Center" alt="" />
#include "opencv2/highgui/highgui.hpp"
#include "opencv2/imgproc/imgproc.hpp"
using namespace cv;
Mat src,dst;
int i = 1;
static void change_dst(int, void*)
{
if(i%2 == 0)i++;
blur( src, dst, Size( i, i ), Point(-1,-1));
imshow("dstImage", dst);
}
int main( int, char** argv )
{
src = imread( argv[1] );
namedWindow("srcImage", 1);
namedWindow("dstImage", 1);
createTrackbar( "mean filter:", "dstImage", &i, 20, change_dst);
change_dst(0, 0);
imshow("srcImage", src);
waitKey();
return 0;
}使用高斯滤波
watermark/2/text/aHR0cDovL2Jsb2cuY3Nkbi5uZXQvYWJjZDE5OTI3MTln/font/5a6L5L2T/fontsize/400/fill/I0JBQkFCMA==/dissolve/70/gravity/Center" alt="" />
#include "opencv2/highgui/highgui.hpp"
#include "opencv2/imgproc/imgproc.hpp"
using namespace cv;
Mat src,dst;
int i = 1;
static void change_dst(int, void*)
{
if(i%2 == 0)i++;
GaussianBlur( src, dst, Size( i, i ), 0, 0 );
imshow("dstImage", dst);
}
int main( int, char** argv )
{
src = imread( argv[1] );
namedWindow("srcImage", 1);
namedWindow("dstImage", 1);
createTrackbar( "gauss filter:", "dstImage", &i, 20, change_dst);
change_dst(0, 0);
imshow("srcImage", src);
waitKey();
return 0;
}使用自己定义线性滤波
#include "opencv2/highgui/highgui.hpp"
#include "opencv2/imgproc/imgproc.hpp"
using namespace cv;
Mat src,dst,Kernel;
int main( int, char** argv )
{
src = imread( argv[1] );
namedWindow("srcImage", 1);
namedWindow("dstImage", 1);
Kernel = (Mat_<double>(3,3) << 1, 2, 1, 2, 4, 2, 1, 2, 1)/16;
filter2D(src, dst, -1 , Kernel, Point(-1,-1));
imshow("dstImage", dst);
imshow("srcImage", src);
waitKey();
return 0;
}举一反三
K =vhT
将卷积核K拆分成列向量v和行向量h
-
C++: void sepFilter2D(InputArray src,
OutputArray dst, int ddepth, InputArray kernelX, InputArray kernelY, Point anchor=Point(-1,-1), doubledelta=0, int borderType=BORDER_DEFAULT )
-
- src – Source image.
- dst – Destination image of the same size and the same number of channels as src .
- ddepth –
- Destination image depth. The following combination of src.depth() and ddepth are
supported: -
- src.depth() = CV_8U, ddepth =
-1/CV_16S/CV_32F/CV_64F - src.depth() = CV_16U/CV_16S, ddepth =
-1/CV_32F/CV_64F - src.depth() = CV_32F, ddepth =
-1/CV_32F/CV_64F - src.depth() = CV_64F, ddepth =
-1/CV_64F
- src.depth() = CV_8U, ddepth =
when ddepth=-1, the destination image will have the same depth
as the source. - Destination image depth. The following combination of src.depth() and ddepth are
- kernelX – Coefficients for filtering each row.
- kernelY – Coefficients for filtering each column.
- anchor – Anchor position within the kernel. The default value
 means
means
that the anchor is at the kernel center. - delta – Value added to the filtered results before storing them.
- borderType – Pixel extrapolation method. See
highlight=sepfilter2d#int%20borderInterpolate(int%20p,%20int%20len,%20int%20borderType)" rel="nofollow" title="int borderInterpolate(int p, int len, int borderType)" style="color:rgb(0,144,217);text-decoration:none;">borderInterpolate()
for
details.
參数基本没什么好讲,都是一样的,以下我们用这个函数来进行高斯卷积(滤波)
#include "opencv2/highgui/highgui.hpp"
#include "opencv2/imgproc/imgproc.hpp"
using namespace cv;
Mat src,dst,kernelX,kernelY;
int main( int, char** argv )
{
src = imread( argv[1] );
namedWindow("srcImage", 1);
namedWindow("dstImage", 1);
kernelX = (Mat_<double>(1,5) << 1,4,6,4,1)/16;
kernelY = (Mat_<double>(1,5) << 1,4,6,4,1)/16;
sepFilter2D(src, dst, -1, kernelX, kernelY);
imshow("dstImage", dst);
imshow("srcImage", src);
waitKey();
return 0;
}最新文章
- leetcode
- Android SDK Manager无法更新的解决[ 转]
- Unity内存优化(贴图层面)
- Other linker flags
- [转]解决IIS下UTF-8文件报错乱码的问题
- golang获取数据表转换为json通用方法
- 阿里巴巴笔试整理系列 Session2 高级篇
- OC基础 可变数组与不可变数组的使用
- Hibernate学习笔记(1)Hibernate构造
- 超市RFID结算系统项目进度与总结
- XML文档读取-DOM4j
- Python_如何去除字符串里的空格
- Static,重载,List的知识点
- IMDb、烂番茄、MTC、各种电影行业评分名字整理
- Go-day02
- Eclipse Java EE IDE for Web Developers集成的Maven 3 指向自己安装的 Maven
- cpu的组成及分工
- Asp.net core 学习笔记 ( User Secrets )
- windows 下,CCXT库的安装
- JavaScript之字符串的常用操作函数