ROS-SLAM仿真-hector
2024-10-01 11:08:33
前言:hector_slam可以很好的在空中机器人,手持构图设备及特种机器人中运行。
hector_slam不需要订阅里程计信息/odmo消息,而是直接使用激光估算里程计信息,因此,当机器人速度较快时会发生打滑现象,导致建图效果出现误差。
前提:已下载并编译了相关功能包集,如还未下载,可通过git下载:https://github.com/huchunxu/ros_exploring.git
一、安装hector_slam功能包
ros中已集成了hector_slam功能包
sudo apt-get install ros-kinetic-hector-slam
二、在Gzebo中仿真SLAM
2.1 启动仿真环境
cd ~/catkin_ws/src/robot_mrobot/mrobot_gazebo/launchroslaunch mrobot_laser_nav_gazebo.launch
2.2 启动slam导航
cd ~/catkin_ws/src/robot_mrobot/mrobot_navigation/launch roslaunch hector_demo.launch
2.3 启动键盘控制
roslaunch mrobot_teleop mrobot_teleop.launch
-----------------------------------------
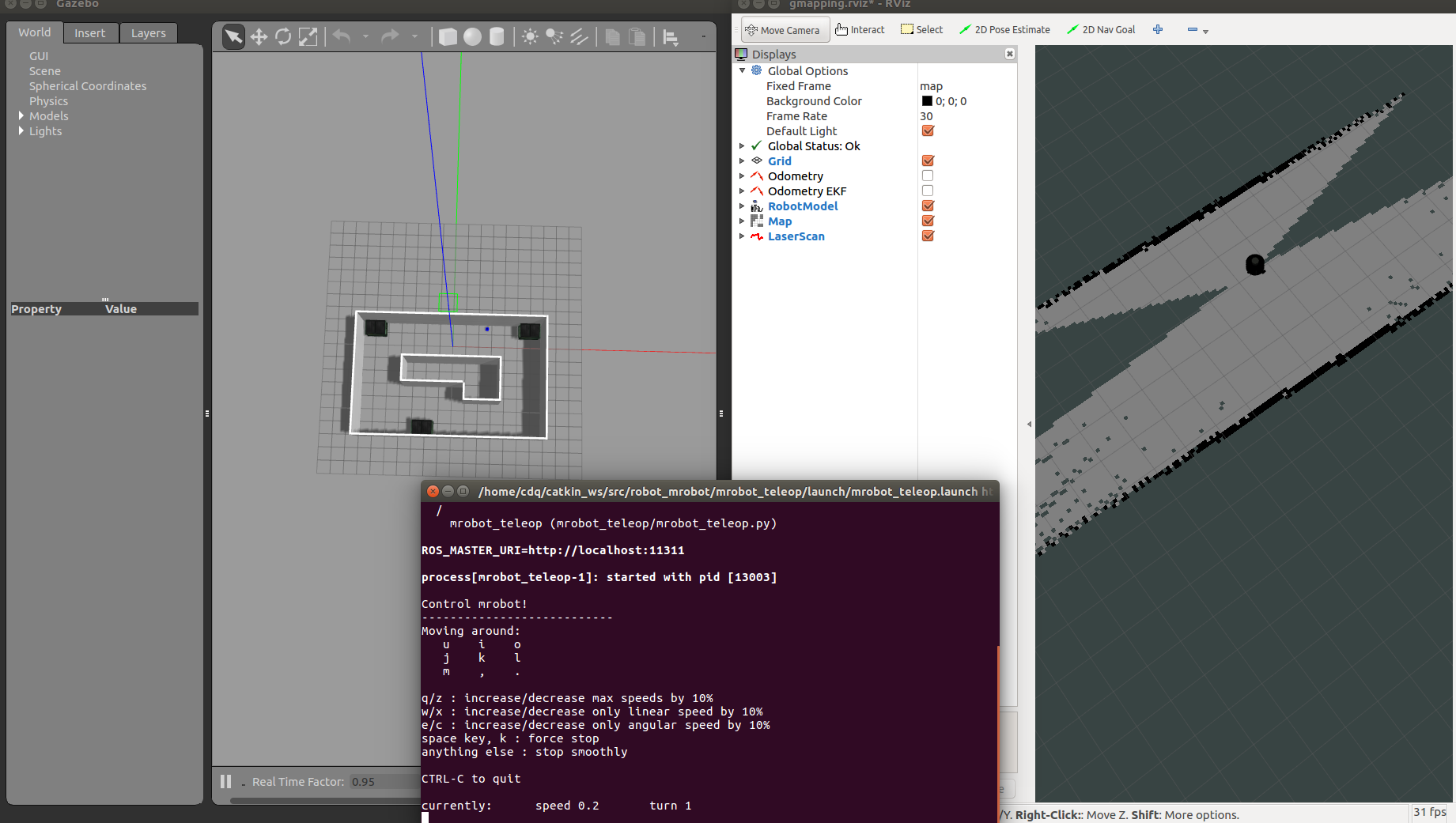
显示如下:
-END-
最新文章
- 【Python五篇慢慢弹】数据结构看python
- Palm是一家英國智能手機公司
- vs2013 支持C#6.0 Install-Package Microsoft.Net.Compilers
- 如何把excel数据导入数据库
- Haxe - Actuate.Tween
- ASP.NET WEB API 2 框架揭秘 读书笔记(一)
- 【Leetcod】Unique Binary Search Trees II
- 【原创】leetCodeOj --- Interleaving String 解题报告
- Javaweb阶段知识回顾一
- fs模块(二)
- Mysql AVG() 值 返回NULL而非空结果集
- 佳鑫:信息流广告CTR一样高,哪条文案转化率更好?
- 嵌入式FIFO核的调用
- PyCharm的基本快捷键和配置简介
- unity3d 第一人称脚本解释MouseLook
- linux中使用另一用户打开拥有图形界面的程序
- topcoder srm 480 div1
- MMU理解
- Flexbox指南
- hdu2088