LR Optimization-Based Estimator Design for Vision-Aided Inertial Navigation
Abstract
我们设计了一个 hybrid 估计器, 组合了两种算法, sliding-window EKF 和 EKF-SLAM.
我们的结果表示, hybrid算法比单一的好.
1. Introduction
EKF-SLAM和sliding-window EKF对相同的测量信息以不同的处理.
我们展示说, 最优的处理方式是, 基于特征跟踪长度 的分布来处理每个特征.
这个分布不是事先知道的(它基于环境, 相机运动), 所以我们从图像序列中学习. 使用了这个信息, 最优的策略来处理特征测量可以通过解决一个 单变量优化问题 来解决.
2. Related Work
a) Exact Reformulations of the SLAM equation
..
b) Approximations of the SLAM equations
[5-7] 用了SLAM等式的近似来减少计算量, 我们的方法没有写信息丢失, 没有近似, 比起EKF的线性化的不准确.
c) Feature Selection methods
..
3. Estimators for VIO
MSCKF和EKF-SLAM都用了一样的信息, 只是用不同的方法来组织算力和线性化.
如果测量模型是线性的, 两个方法会有一样的结果,跟IMU位姿的MAP是一样的.
在算力上, 就很不一样了. EKF-SLAM的算力是特征数量的立方(因为在状态向量里, 所有特征是可观的), 而MSCKF是跟特征数量线性的, 而跟特征跟踪的长度立方.
所以,
- 如果很多特征被跟踪, 即使是在很小的帧中, MSCKF会更好.
- 如果有很多点被长期跟踪, EKF-SLAM会计算力更低
所以EKF-SLAM和MSCKF是互补的.
4. The Hybrid MSCKF/SLAM Algorithm
A. The MSCKF algorithm for VIO
特征向量:
\mathbf{x}_{I_{k}}^{T} & \mathbf{x}_{C_{1}}^{T} & \mathbf{x}_{C_{2}}^{T} & \cdots & \mathbf{x}_{C_{m}}^{T}
\end{array}\right]^{T}
\]
IMU的状态是:
\overline{\mathbf{q}}^{T} & \mathbf{p}^{T} & \mathbf{v}^{T} & \mathbf{b}_{g}^{T} & \mathbf{b}_{a}^{T}
\end{array}\right]^{T}
\]
MSCKF用IMU测量来传播当前的IMU状态和协方差矩阵, \(P_{k+1|k}\).
我们假设第 \(i-th\)个特征, 它在 \(l\) 个图像被观测到, 然后刚跟踪失效. 这时候, 我们用所有的特征测量来做EKF更新.
观测的非线性等式是: \(z_{ij} = h(x_{C_j}, f_i) + n_{ij}\) , for \({h = 1, ..., l}\), \(f_i\) 是特征的位置(逆深度表示); $n_{ij} $ 是噪声向量, 零均值高斯, cov是\(\sigma^2 \mathbf{I}_2\).
使用所有的观测, 我们计算特征观测 \(\hat{f}_i\) , 然后计算残差 \(\tilde{z}_{ij} = z_{ij}- h(\hat{x}_{C_j}, \hat{f}_i), j= 1 ... l\). 通过线性化, 这些残差可以被写为:
\]
因为特征没有被包括在MSCKF的状态向量里, 我们把它边缘化掉.
首先, 我们形成这个 \(l\) 个残差(一个地图点的所有观测):
\]
这里 \(\tilde {z}_i\) 和 \(n_i\) 是元素 \(\tilde{z}_{ij}\) 和 \(n_{ij}\) 组成.
我们定义残差向量 \(\tilde{z}^o_i = V^T \tilde{z}_i\), 这里 \(V\) 是一个列形成 \(H_{fi}\) 左零空间 (left nullspace) 的矩阵. 所以, 我们有:
\]
然后, 我们可以用马氏gating test, 对于残差 \(\tilde{z}^o_i\):
\]
通过把所有的残差堆叠在一起, 我们有:
\]
如果在某个时刻有很多特征要处理, 可以省略更多的计算资源. 在[10]中, 我们可以计算 \(H^o\) 的QR分解, 写作 \(H^o=QH^r\), 然后用 \(\tilde{z}^r\) 来更新:
\]
这里 \(n^r\) 是一个 \(r\times1\) 的噪声向量, 协方差矩阵 \(\sigma^2 \mathbf{I}_r\).
一旦 \(\tilde{z}^r\) 和矩阵 \(H^R\) 被计算了, 我们计算state correction 和 update covariance矩阵通过标准的EKF公式:
\Delta \mathbf{x} &=\mathbf{K} \tilde{\mathbf{z}}^{r} \\
\mathbf{P}_{k+1 \mid k+1} &=\mathbf{P}_{k+1 \mid k}-\mathbf{K} \mathbf{S} \mathbf{K}^{T} \\
\mathbf{S} &=\mathbf{H}^{r} \mathbf{P}_{k+1 \mid k}\left(\mathbf{H}^{r}\right)^{T}+\sigma^{2} \mathbf{I}_{r} \\
\mathbf{K} &=\mathbf{P}_{k+1 \mid k}\left(\mathbf{H}^{r}\right)^{T} \mathbf{S}^{-1}
\end{aligned}
\]
B. Computational complexity of the MSCKF
MSCKF计算特征观察的方式是最优的, 因为除了EKF的线性化[22]之外, 没有用任何近似.
这个在滑窗的状态 \(m\) , 包含最少最长的特征跟踪的状态.
如果不是的话, 那么大于 \(m\) 过去的观测就没法被处理了. 所以为了利用所有可用的特征, MSCKF必须保持一个足够长的滑窗的状态.
MSCKF的计算量以如下决定:
- Eq 5计算的残差和雅克比矩阵. 如果有 \(n\) 个特征要处理, 特征跟踪的长度是 \(l_i\), 那就需要 \(\mathcal{O}(\Sigma_{i=1}^n \mathcal{l}^3_i)\) 个操作.
- 马氏测试, 需要 \(\mathcal{O}(\Sigma_{i=1}^nl^3)\) 个操作.
- Eq 8中的计算, 大约是 \(\mathcal{O}(\Sigma_{i=1}^nl^3)\)个操作
- 卡尔曼增益和协方差更新的计算, 需要 \(\mathcal{O}\left(r^{3} / 6+r(15+6 m)^{2}\right)\) . 这里 \(15+6m\) 是状态协方差的大小, \(r\) 是 \(H^r\) 个行数.
\]
这里 l _1,2,3 是三个最长的特征跟踪.
C. The hybrid MSCKF/SLAM algorithm
我们的状态向量是, 有IMU状态, 滑窗的m个相机, 和\(s_k\) 个特征.
\mathbf{x}_{I_{k}}^{T} & \mathbf{x}_{C_{1}}^{T} & \cdots & \mathbf{x}_{C_{m}}^{T} & \mathbf{f}_{1}^{T} & \cdots & \mathbf{f}_{s_{k}}^{T}
\end{array}\right]^{T}
\]
最优的(考虑计算需求)策略来用特征是简单的:
- 如果特征的track数少于 \(m\), (i.e. \(l_i < m\)), 那么用MSCKF来处理.
- 如果大于\(m\) 个track, 就初始化到state vector.
\tilde{\mathbf{z}}_{k}^{r} \\
\tilde{\mathbf{z}}_{1 m} \\
\vdots \\
\tilde{\mathbf{z}}_{s_{k} m}
\end{array}\right] \simeq\left[\begin{array}{c}
\mathbf{H}^{r} \\
\mathbf{H}_{1 m} \\
\vdots \\
\mathbf{H}_{s_{k} m}
\end{array}\right] \tilde{\mathbf{x}}_{k}+\mathbf{n}_{k}=\mathbf{H}_{k} \tilde{\mathbf{x}}_{k}+\mathbf{n}_{k}
\]
在上式中, \(\tilde{z}_{jm}\) 是 \(s_k\) SLAM特征的残差观测, \(H_{jm}\) 是相关的雅克比. 每个残差是一个 \(2\times1\) 的向量, \(H_{jm}\) 是一个 \(2\times(15+6m+3s_k)\) 的矩阵.
为了初始化新的特征, \(m\) 个观测会用来三角化 然后计算它的初始协方差 和 跟其他滤波状态的互相关.
我们用逆深度, 因为它很棒的线性化特性. 最新的相机clone, \(x_{C_m}\) 是用作"anchor" state.

5. 优化Hybrid EKF的表现
\(m\) 的选择有一个深渊的影响在算法的视觉需要上.
A. Operation count for each update
每个迭代的浮点运算的数量:
f_{k}=& \alpha_{1} \sum_{i=1}^{n} \ell_{i}^{3}+\alpha_{2}\left(r+2 s_{k}\right)^{3} \\
&+\alpha_{3}\left(r+2 s_{k}\right)\left(15+6 m+3 s_{k}\right)^{2}+l . o . t
\end{aligned}\tag{16}
\]
\(\alpha_i\) 是已知常量, \(n\) 是MSCKF的特征数, \(r\) 是Eq13, \(l.o.t.\) 表示lower order terms.
上式的三个项对应MSCKF残差的计算, 矩阵 \(\mathbf{S}\) 的Cholesky factorization, 和协方差的更新等式.
\(r\) 表示约束的个数, it is bounded above by \(6m-7\): 滑窗中的位置量是 \(6m\), 特征估计不能提供任何全局pose和scale的信息, 也就是7个自由度; 如果有很多特征, 我们有$r \approx 6m-7 $:
f_{k} \approx & \alpha_{1} \sum_{i=1}^{n} \ell_{i}^{3}+\alpha_{2}\left(6 m+2 s_{k}-7\right)^{3} \\
&+\alpha_{3}\left(6 m+2 s_{k}-7\right)\left(15+6 m+3 s_{k}\right)^{2}
\end{aligned}
\]
B. Minimizing the average operation count
我们现在来决定 \(m\) 的最优值, 来最小化 hybrid EKF的时间.
Eq 16提供了一次滤波更新计算的操作数. 第一眼看的时候, 我们可能会觉得是根据 \(m\) 来最小化公式. 但是实际是一个病态的问题. 举例, 如果\(m=20\) , 这时候有10个特征有20个track; 这时候我们可以选择提升window size或者是加到state vector. 但是最优解是基于未来的行为的, 如果有>>20个track, 自然是加到状态里好. 如果只有21个track, 自然increase \(m\) 是更好的做法.
我们可以用统计数据. 在滤波操作的时候, 我们收集数据来学习probability mass function(pmf) 在特征跟踪长度上 \(p(l_i)\). 用pmfs, 我们可以计算平均下来EKF更新的操作数 \(\bar{f}(m)\).
我们发现这个cost curve是 quasiconvix(准凸面).

所以, 为了减少优化需要的时间, 我们从一个足够好的初始猜测(e.g. the last computed threshold)通过局部搜索来做优化. 因为特征track的数据特征会会随着时间改变, 我们在15秒的区间做pmf的学习.
注意在现代电脑, flop计算来model计算量的cost不一定是永远work的, 因为表现还会被一些因素影响, 比如: vectorization, cache access patterns, data locality, etc.
6. Experimental Results
我们基于数据集[26]来做测试, 有29.6km长的轨迹.
**我们发现纯MSCKF得到最高的精度. 我们把这个归因于两个原因: 1. MSCKF特征都显式的边缘化了, 也没有Gaussianity假设给pdf在特征位置误差上(在SLAM里是这么做的). 2. 特征的所有测量都在MSCKF里联合用了, 这样外点会被更容易的检测, 也可以计算更好的线性点. ** ???
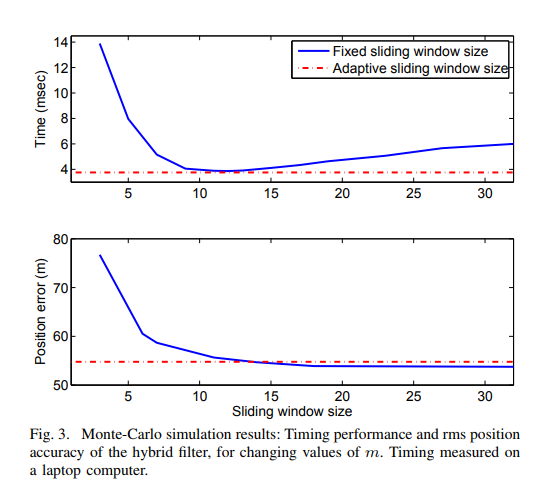
通过融合MSCKF和EKF-SLAM, 可能丢失了一些精度, 因为在状态向量里的特征被假设是Gaussian的. 但是, 我们可以看到, 如果window的size大于一个值(比如9), 精度的变化就可以忽略不计了.
这个insight是, 如果有足够数量的观测来初始化特征, 那么特征的errors'pdf就变得"足够高斯", 这样hybrid filter的精度就跟MSCKF很接近了, 在我们的优化中, 我们不允许 \(m\) 的值比一个阈值(7)小.
Fig. 3的时间损耗是在Core i7(2.13 GHz)上算的. 如果在这个平台上, 是很容易实时的, hybrid filter需要4msec之内(在最优的值 \(m\) 的时候).
B. Real-world data
每帧平均track 540个特征点, 平均track长度是5.06帧.
在移动处理器上跑的时候, MSCKF平均更新时间是139ms, EKF是774ms, hybrid是77ms.
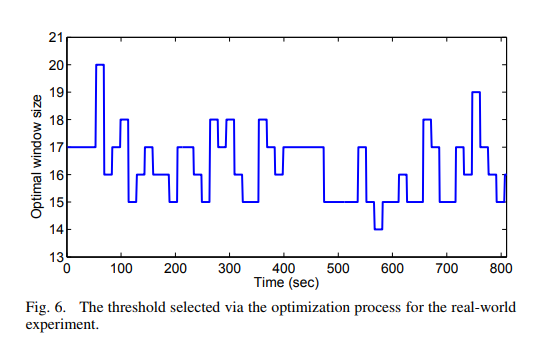
我们每15秒计算一次, 这个过程要0.31ms.
7. Discussion and Concluding Remarks
没啥
最新文章
- 动力节点Java培训告诉你Java线程的多功能用法
- How does Unity.Resolve know which constructor to use?
- javascript学习内容--改变样式、取消设置、显示内容、隐藏内容
- unity3d Vector3.Lerp解析
- BootCDN和npm
- Motion images compression and restoration based on computer vision
- 在CentOS上装 ElasticSearch
- 247. Strobogrammatic Number II
- [置顶] Effective STL 学习笔记
- Android RelativeLayout 布局android:layout_centerHorizontal="true"注意
- Objective-C学习篇06—NSString与NSMutableString
- if最简单的用法
- CocoaPods在使用中的几个问题
- kubernetes 命令使用
- LoadRunner录制手机APP教程
- SQL 农经权数据库问题提取_身份证号码相同(字段值出现多次);身份证号码相同但姓名不同(A字段相同,B字段不相同);发包方无承包方信息(A表有,B表无)等
- iOS开发笔记(Swift)-针对Swift调用PPiFlatSegmentedControl项目的一些修改
- grid 操作实例
- SQL 优化tips 及误区
- 微信小程序template模板与component组件的区别和使用