GPS定位RTK解决方案
2024-09-05 08:20:06
GPS差分:
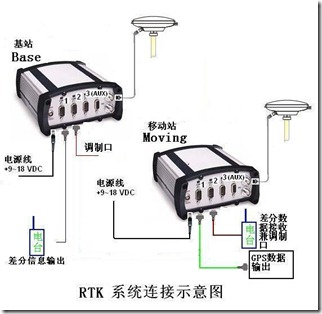
实时差分定位是指在测量点上实时得到高精度的定位结果。这种模式的具体方法是:在一个已知测站上架设GPS基准站接收机和数据电台,连续跟踪所有可见卫星,并通过数据电台向移动站发送差分改正数据。移动站接收机通过移动站数据电台接收基准站发射来的差分改正数据,并在移动站接收机内部进行处理,从而实时得到移动站的高精度位置。
实时差分定位分为伪距差分和载波相位差分。伪距差分也叫DGPS,精度为亚米级到米级,这种方式是基准站将基准站上测量得到的RTCM数据(伪距改正数)通过数据链传输到移动站,移动站接收到改正数后,自动进行解算,得到经差分改正以后的坐标。载波相位差分也叫RTK,它的工作思路与DGPS相似,只不过是基准站是将载波相位改正数发送到移动站(而不是发射伪距改正数),移动站接收到改正数后,自动进行解算,得到经改正以后的比DGPS高得多的实时测量结果。这种方法的精度一般为2厘米左右。
硬件需求:
项目 设备名称
一 基准站
1 GPS 接收机propak (内置GPS板卡)
2 高精度 GPS 天线
3 GPS 天线电缆
4 基准站发射电台 35W
5 电台天线及电缆
6 电池及充电器
二 移动站
1 GPS 接收机 propak(内置GPS板卡)
2 高精度 GPS 天线
3 GPS 天线电缆
4 移动站接收电台 2W
5 电台天线及电缆
6 电池及充电器
最新文章
- React Native的环境搭建以及开发的IDE
- udacity google deep learning 学习笔记
- 将事件绑定在html标签中和js动态绑定的区别
- Leetcode#99 Recover Binary Search Tree
- iframe根据子页面自动调整大小
- mac下的改装人生——把主硬盘换成ssd
- 【iOS开发-71】解决方式:Attempting to badge the application icon but haven't received permission from the...
- 让ECSHOP模板支持转smarty时间戳
- CNN中的卷积核及TensorFlow中卷积的各种实现
- 开源一款iOS中国地图行政区控件(含一级与二级行政区)
- django框架简介
- Python 安装 BeautifulSoup(Win7)
- JavaScript charAt() 方法
- Leetcode_Easy_14
- Go语言学习之1 基本概念、环境搭建、第一个Go程序
- UE 不生成.bak文件
- (贪心)School Marks -- codefor -- 540B
- 爬虫---selenium动态网页数据抓取
- jackson的小知识
- vue通过(NGINX)部署在子目录或者二级目录实践