第三期 行为规划——11.在C ++中实现第二个成本函数
2024-10-08 02:38:35
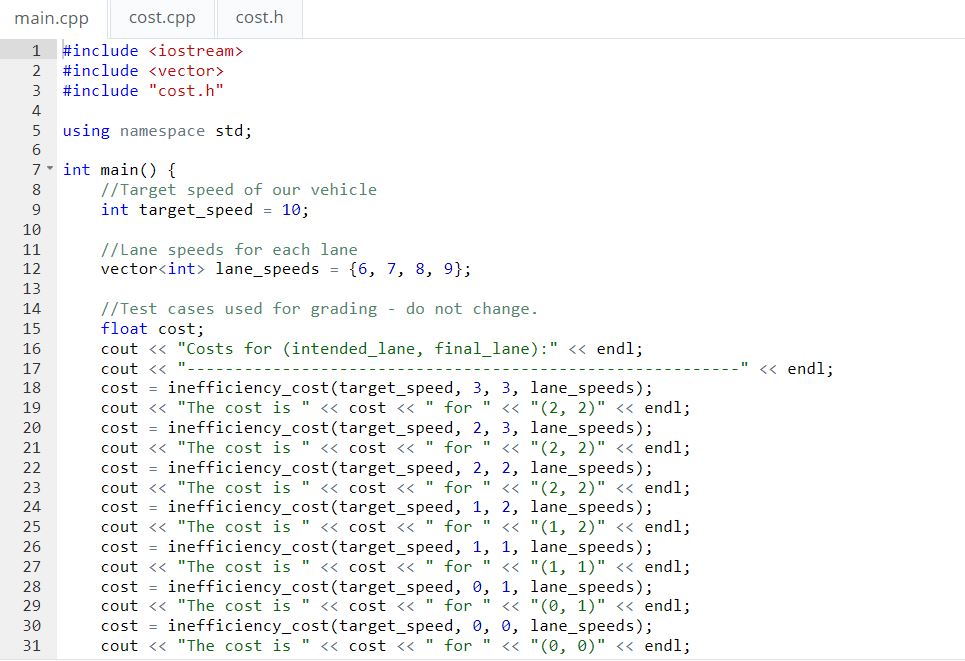
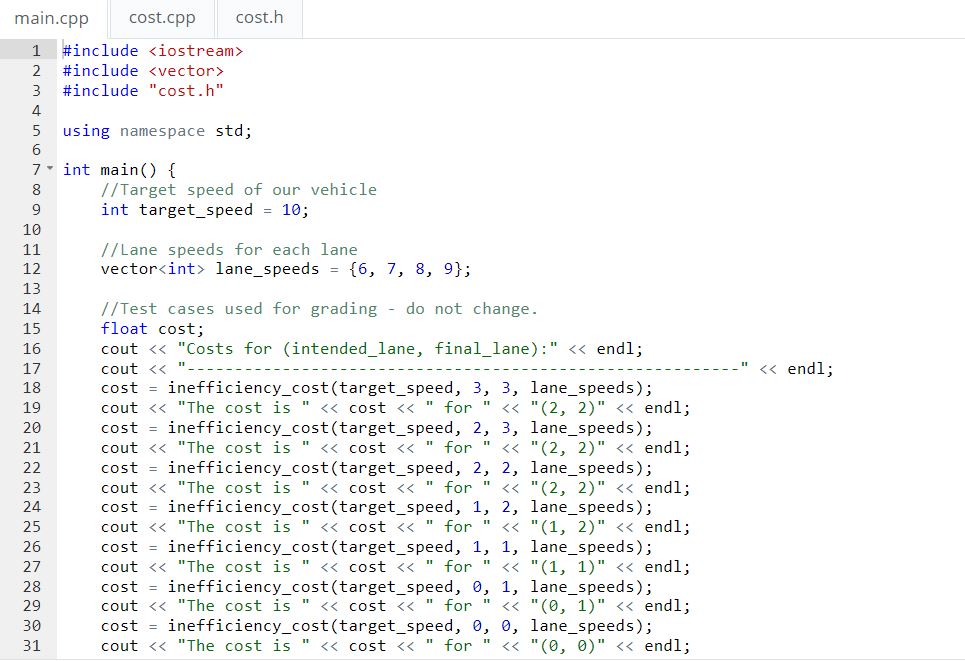
在大多数情况下,单一成本函数不足以产生复杂的车辆行为。在这个测验中,我们希望您在C ++中实现更多的成本函数。我们稍后会在本课中使用这两个C ++成本函数。这个测验的目标是创建一个成本函数,使车辆在最快的车道中行驶,给出几个行为选项。我们将为该功能提供以下四个输入:
- 目标速度:目前设置为10(无单位),您希望车辆行驶的速度。
- 预定车道:给定行为的预定车道。对于PLCR,PLCL,LCR和LCL,这将是当前车道的一个车道。
- 最后车道:给定行为的最终通道。对于LCR和LCL,这将是一条通道。
- 基于该车道中的交通量的车道速度向量:{6,7,8,9}。
您在实施中的任务是创建一个满足以下条件的成本函数:
- 由于预定车道和最终车道都是高速车道,所以成本降低。
- 成本函数为每种可能的行为提供不同的成本:KL,PLCR / PLCL,LCR / LCL。
- 成本函数生成的值在0到1的范围内。


最新文章
- EXT.NET 使用总结(3)--动态图表
- Lesson: The "Hello World!" Application
- SQL数据库约束行为---防止数据漏填
- STL map 用法
- NET中级课--文件,流,序列化3
- keyDown keyPress keyUp 事件的区别
- C语言 大小端 字节对齐
- Android Develop【转】
- Ubuntu 14.04 LAMP搭建(Apache 2.47+MySQL 5.5+PHP5.5)
- 苹果笔记本只能上QQ,微信,任何浏览器不能打开网页的问题。
- 【转载】NetFPGA-1G-CML从零开始环境配置
- remove duplicate of the sorted array
- Egg 中 Controller 最佳实践
- Python多线程的简单实现(生产者消费者模型)
- 关于always块内for循环的执行方式
- ABP框架提示框
- C_数据结构_循环队列
- flask模板应用-消息闪现(flash())
- python 函数闭包()
- Python3.6安装OpenCV
热门文章
- C++: Mac上安装Boost库并使用CLion开发
- 使用neo4j-import导入数据及关系
- Centos无法连接无线网络解决办法
- 低价替代Vector CANoe CAN总线适配解决方案支持所有USBCAN(周立功CAN、PCAN、Kvaser、ValueCAN、NI CAN)
- 洛谷 2055 [ZJOI2009]假期的宿舍——二分图匹配
- python pattern 类
- 【风马一族_SQL Server】
- Jeff Dean 光辉事迹
- Docker数据管理-数据卷 data volumes和数据卷容器data volumes containers的使用详解
- node写简单的爬虫(二)