第13章节 BJROBOT 雷达跟随【ROS全开源阿克曼转向智能网联无人驾驶车】
2024-10-19 05:32:45
雷达跟随说明:注意深度摄像头的 USB 延长线,可能会对雷达扫描造成影响, 所以在雷达跟随前,把深度摄像头的 USB 延长线取下。另外雷达跟随范围大概是前方 50cm 和 120°内扫描到的物体都可以跟随。
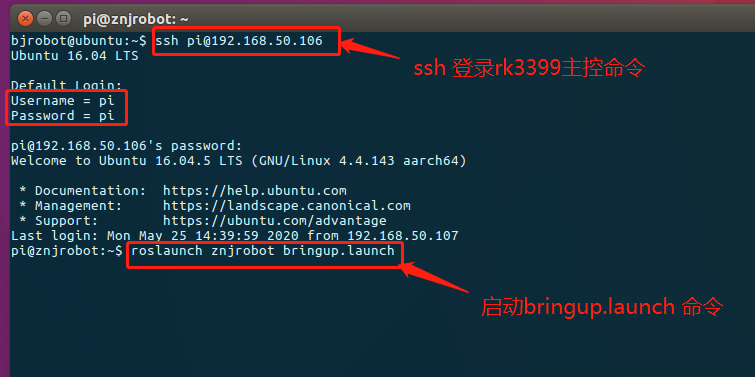
1.把小车平放在地板上,用资料里的虚拟机,打开一个终端 ssh 过去主控端启动roslaunch znjrobot bringup.launch。
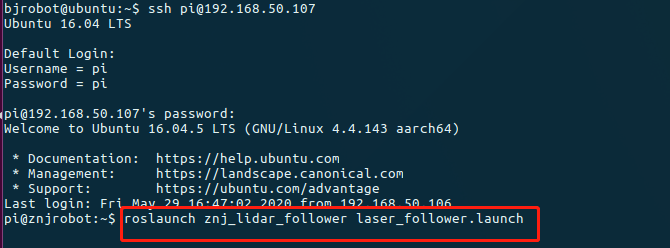
2.在虚拟机端再打开一个终端,ssh 过去启动 roslaunch znj_lidar_follower laser_follower.launch
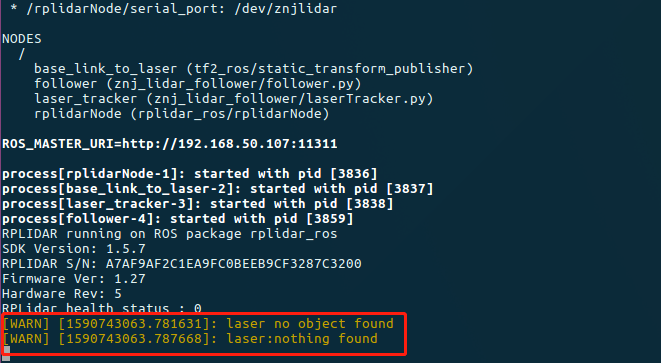
3.如下图出现的警告是因为没有识别物体,此时站过去小车前面,前后左右行走即可实现雷达跟随。
最新文章
- eclipse技巧总结
- 五、点数器《苹果iOS实例编程入门教程》
- UITableView 接口的调用顺序
- ArcGIS Engine要素渲染和专题图制作(转)
- hdoj 1874 畅通工程续
- 从0开始学Swift笔记整理(二)
- [platform]linux platform device/driver(二)--Platform Device和Platform_driver注册过程之详细代码
- MYSQL远程登录权限设置
- POJ 2986 A Triangle and a Circle
- window服务创建
- FPGA知识大梳理(四)FPGA中的复位系统大汇总
- 更好地认知Azure
- ACE定时器
- nginx location配置(URL)
- 1491: [NOI2007]社交网络
- 【前端】向blog或网站中添加语法高亮显示代码方法总结
- docke 基本安装使用
- beego orm 忽略字段
- C# 同步工作站与SQL服务器的时间
- ElasticSearch 2 (26) - 语言处理系列之打字或拼写错误