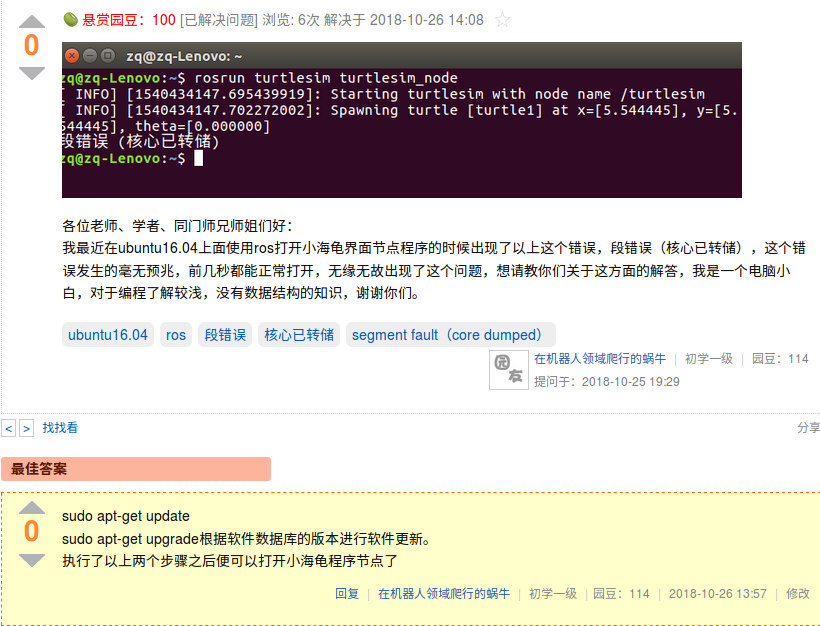
对于一个段错误(核心已转储)问题的解答,错误的英文翻译是segment fault(core dumped)
2024-08-28 18:42:01
笔者在学习ROS的时候遇到的这个问题,使用的系统是ubuntu16.04,ROS版本是kinetic,在运行小海龟程序的时候突然打不开海龟界面的程序节点turtlesim-node,四处寻找答案未果,最后在ROS的问答社区找到了答案,如下图所示,是我在博客问答区发布的问题,最后自己解答了,给大家参考参考。
最新文章
- About me
- Java 相关书籍
- mysql查询所有记录,并去掉重复的记录
- Windows Phone 执行模型概述
- Redis基础知识之—— 缓存应用场景
- 这是BUG吗?
- POJ 2531 Network Saboteur
- Effective JavaScript Item 30 理解prototype, getPrototypeOf和__proto__的不同
- Eclipse 输入出错时自动查找类
- opencl 和Renderscript总结
- SQL Server 远程更新目标表数据
- eclipse 使用Git教程
- ubuntu下python跑任务输出到文件中遇到的一些问题(输出重定向)
- Brocade SAN交换机常用命令
- 第三个Sprint ------第八天
- python 简明教程 【转】
- LeetCode 题解之Number Complement
- 乘风破浪:LeetCode真题_037_Sudoku Solver
- 【codevs1297】硬币 完全背包
- HTML5 中 Geolocation 获取地理位置的原理是什么?