RTT笔记-分析自动初始化机制转
首先全局搜索一个任意的自启动宏,便能找到在rtdef.h中由如下定义
1 #define INIT_BOARD_EXPORT(fn) INIT_EXPORT(fn, "1")
2
3 /* pre/device/component/env/app init routines will be called in init_thread */
4 /* components pre-initialization (pure software initilization) */
5 #define INIT_PREV_EXPORT(fn) INIT_EXPORT(fn, "2")
6 /* device initialization */
7 #define INIT_DEVICE_EXPORT(fn) INIT_EXPORT(fn, "3")
8 /* components initialization (dfs, lwip, ...) */
9 #define INIT_COMPONENT_EXPORT(fn) INIT_EXPORT(fn, "4")
10 /* environment initialization (mount disk, ...) */
11 #define INIT_ENV_EXPORT(fn) INIT_EXPORT(fn, "5")
12 /* appliation initialization (rtgui application etc ...) */
13 #define INIT_APP_EXPORT(fn) INIT_EXPORT(fn, "6")
关于宏INIT_EXPORT的定义就就在上方
1 #ifdef RT_USING_COMPONENTS_INIT
2 typedef int (*init_fn_t)(void);
3 #ifdef _MSC_VER /* we do not support MS VC++ compiler */
4 #define INIT_EXPORT(fn, level)
5 #else
6 #if RT_DEBUG_INIT
7 struct rt_init_desc
8 {
9 const char* fn_name;
10 const init_fn_t fn;
11 };
12 #define INIT_EXPORT(fn, level) \
13 const char __rti_##fn##_name[] = #fn; \
14 RT_USED const struct rt_init_desc __rt_init_desc_##fn SECTION(".rti_fn."level) = \
15 { __rti_##fn##_name, fn};
16 #else
17 #define INIT_EXPORT(fn, level) \
18 RT_USED const init_fn_t __rt_init_##fn SECTION(".rti_fn."level) = fn
19 #endif
20 #endif
21 #else
22 #define INIT_EXPORT(fn, level)
23 #endif
首先RT_USING_COMPONENTS_INIT宏需要在config.h中定义,否则自启动是无效的。
然后使用typedef定义了一个函数指针类型
这里补充一下关于typedef:
目前我知道的typedef有两种用法,其一是起别名,其二是定义新的类型,举个例程说明这两种用法
1 //生产了新类型fun_p
2 typedef int (*fun_p)(void);
3 int app(void)
4 {
5 return 0;
6 }
7
8 typedef struct sTest
9 {
10 fun_p * app_p;
11 }Test_s;
12
13 Test_s test;
14 tset.app_p = app;
回到上文,由于#ifdef后的宏均是未定义,所以一路走else,那么就仅仅剩一句话
1 RT_USED const init_fn_t __rt_init_##fn SECTION(".rti_fn."level) = fn
首先看看RT_USED这个宏,通用定义也在rtdeh.h中
- attribute((used))标识符作用是使定义被标记的函数或数据即使未使用也不会被编译器优化。
- init_fn_t是一个函数指针类型
- __rt_init_##fn是将__rt_init_和我们传入的需要自启动的函数名进行拼接
- SECTION(".rti_fn."level)也就是 __attribute__((section( ".rti_fn."level ))),
__attribute __((section(“name”)))
该函数便是实现自动初始化的关键了,他的作用是将标记的数据或者函数在编译时放到name的数据段中去。
例如系统中有如下语句
综上那么完整语句的翻译便是: 定义了一个名为(_rt_init+需要自动启的函数名)的函数指针,将其保存在(.rti_fn.level)数据段中,并且即使不使用也不会被编译器优化。
到这里基本就能明白自启动的方式了。也就是逐个建立一个指针指向需要自启动的函数,然后将这些指针保存到特定的数据段中。main启动时候,只需要将数据段中的指针函数全部执行一遍即可。
接下来我们看执行初始化的地方,也就是在components.c中
一上来便定义了一些标杆,用来区间化之前准备往里塞的函数指针
1 static int rti_start(void)
2 {
3 return 0;
4 }
5 INIT_EXPORT(rti_start, "0");
6
7 static int rti_board_start(void)
8 {
9 return 0;
10 }
11 INIT_EXPORT(rti_board_start, "0.end");
12
13 static int rti_board_end(void)
14 {
15 return 0;
16 }
17 INIT_EXPORT(rti_board_end, "1.end");
18
19 static int rti_end(void)
20 {
21 return 0;
22 }
23 INIT_EXPORT(rti_end, "6.end");
我们再看看map中的情况
1 __rt_init_rti_start 0x0801e6dc Data 4 components.o(.rti_fn.0)
2 __rt_init_rti_board_start 0x0801e6e0 Data 4 components.o(.rti_fn.0.end)
3 __rt_init_rt_hw_spi_init 0x0801e6e4 Data 4 drv_spi.o(.rti_fn.1)
4 __rt_init_rti_board_end 0x0801e6e8 Data 4 components.o(.rti_fn.1.end)
5 __rt_init_ulog_init 0x0801e6ec Data 4 ulog.o(.rti_fn.2)
6 __rt_init_ulog_console_backend_init 0x0801e6f0 Data 4 console_be.o(.rti_fn.2)
7 __rt_init_finsh_system_init 0x0801e6f4 Data 4 shell.o(.rti_fn.6)
8 __rt_init_fal_init 0x0801e6f8 Data 4 fal.o(.rti_fn.6)
9 __rt_init_rti_end 0x0801e6fc Data 4 components.o(.rti_fn.6.end)
10
我们想自启动的函数__rt_init_rt_hw_spi_init、__rt_init_ulog_init 等都被包夹在了这些标识杆中间。至于他的排序问题,文末将用代码进行测试推论。
按照系统执行顺序来分别看下自启动的两个函数:
首先是 rtthread_startup() →void rt_hw_board_init() →void rt_components_board_init(void)
1 const init_fn_t *fn_ptr;
2
3 for (fn_ptr = &__rt_init_rti_board_start; fn_ptr < &__rt_init_rti_board_end; fn_ptr++)
4 {
5 (*fn_ptr)();
6 }
其中__rt_init_rti_board_start和__rt_init_rti_board_end便是上面的两个标志杆,是经过宏里面的##拼接后的结果,然后我们再看看上面的map,就发现这个for循环实际上是执行了被包夹的__rt_init_rti_board_start和__rt_init_rt_hw_spi_init,拆解一下就是函数rti_board_start和rt_hw_spi_init。
我们再看第二个自启动的函数
rtthread_startup() →rt_application_init()→void main_thread_entry(void *parameter)→rt_components_init();
1 const init_fn_t *fn_ptr;
2
3 for (fn_ptr = &__rt_init_rti_board_end; fn_ptr < &__rt_init_rti_end; fn_ptr ++)
4 {
5 (*fn_ptr)();
6 }
这里和上面类似,只是标志杆变为了level2~6之间的函数了。也就是level0~2间的函数是一起执行的,level2~6间的函数是一起执行的。
下来我们研究一下这个字段的排序问题
首先由已知,在.rti_fn.后面是以数由小到大排序。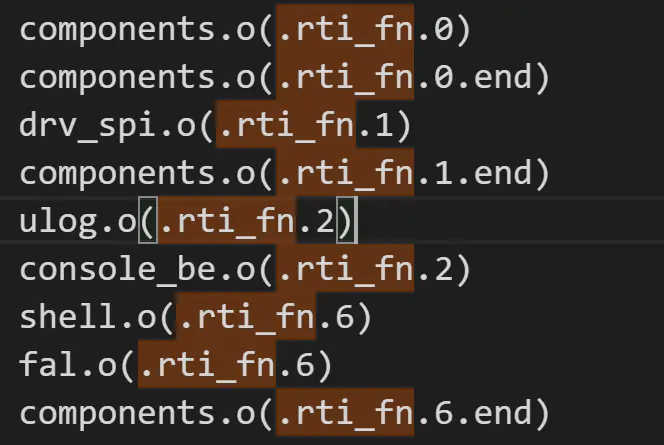
那么尝试一下在后面添加字符,添加两个新的标志杆
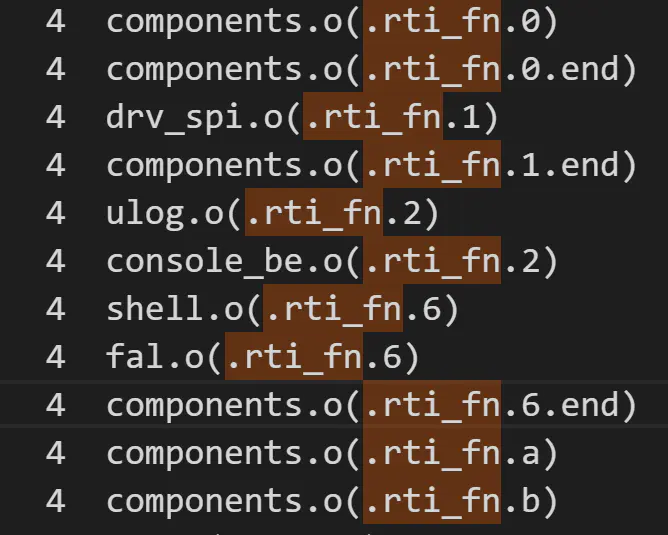
字符排在了数字后面,然后再添加一个大写字母

A排序到了小写字母之前数字之后,也就是这个排序可能就是ascii码的排序了。
还有个问题就是同字段的两个函数指针的顺序如何呢,例如
1 __rt_init_ulog_init 0x0801e6f8 Data 4 ulog.o(.rti_fn.2)
2 __rt_init_ulog_console_backend_init 0x0801e6fc Data 4 console_be.o(.rti_fn.2)
我将之前的标杆修改为
1 //测试用标志杆
2 static int rti_A(void)
3 {
4 return 0;
5 }
6 INIT_EXPORT(rti_A, "2");
7
8 //测试用标志杆
9 static int rti_a(void)
10 {
11 return 0;
12 }
13 INIT_EXPORT(rti_a, "2");
14
15 static int rti_1(void)
16 {
17 return 0;
18 }
19 INIT_EXPORT(rti_1, "2");
然后map结果是:
1 __rt_init_rti_start 0x0801e6e8 Data 4 components.o(.rti_fn.0)
2 __rt_init_rti_board_start 0x0801e6ec Data 4 components.o(.rti_fn.0.end)
3 __rt_init_rt_hw_spi_init 0x0801e6f0 Data 4 drv_spi.o(.rti_fn.1)
4 __rt_init_rti_board_end 0x0801e6f4 Data 4 components.o(.rti_fn.1.end)
5 __rt_init_rti_A 0x0801e6f8 Data 4 components.o(.rti_fn.2)
6 __rt_init_rti_a 0x0801e6fc Data 4 components.o(.rti_fn.2)
7 __rt_init_rti_1 0x0801e700 Data 4 components.o(.rti_fn.2)
8 __rt_init_ulog_init 0x0801e704 Data 4 ulog.o(.rti_fn.2)
9 __rt_init_ulog_console_backend_init 0x0801e708 Data 4 console_be.o(.rti_fn.2)
10 __rt_init_finsh_system_init 0x0801e70c Data 4 shell.o(.rti_fn.6)
11 __rt_init_fal_init 0x0801e710 Data 4 fal.o(.rti_fn.6)
12 __rt_init_rti_end 0x0801e714 Data 4 components.o(.rti_fn.6.end)
13
可以看出排序和我代码顺序有关,也就是应该和编译顺序有关。
最新文章
- 聊聊 Apache 开源协议
- sql 语句
- 【Codeforces717G】Underfail Hash + 最大费用最大流
- mapReduce编程之Recommender System
- 重构Web Api程序(Api Controller和Entity)续篇
- leetcode 100. Same Tree
- 创建一个EMS 扩展包
- [HNOI 2013] 消毒 (搜索,二分图匹配)
- Verilog 读写文件
- 房费制 之 登录BUG
- ch4-注册 登陆 实现 cookie使用
- 第二章 ArrayList源码解析
- A problem has been detected and windows has been shut down to prevent damage to your computer.他么啥意思?看这里!【蓝屏】
- pyinstaller 打包exe可执行文件
- VS2017 配置glfw3
- 使用nginx运行thinkphp的nginx配置
- Hibernate配置关系(申明:来源于csdn)
- [cf1038E][欧拉路]
- Visual Studio 2017 常用快捷键
- robot framework下载文件操作