2. A Distributional Perspective on Reinforcement Learning
本文主要研究了分布式强化学习,利用价值分布(value distribution)的思想,求出回报\(Z\)的概率分布,从而取代期望值(即\(Q\)值)。
Q-Learning
Q-Learning的目标是近似Q函数,即在策略\(\pi\)下回报\(Z_t\)的期望值:
\]
Q-Learning的核心是Bellman方程。它可以通过时序差分学习迭代更新Q函数
\]
然后,最小化估计项\(Q(s,a)\)和目标项\(r+\gamma \max_{a^\prime}Q(s^\prime,a^\prime)\)的均方误差损失
\]
通过假设目标\(r+\gamma \max_{a^\prime}Q(s^\prime,a^\prime)\)为定量,最小化公式(2)使\(Q(s,a)\)朝目标方向移动来优化网络。
Distributional RL
对于给定状态\(s\)和动作\(a\),智能体获得的回报\(Z(s,a)\)是服从某种分布的随机变量,传统的方法是利用它的期望值来优化策略。
而分布式强化学习的思想是直接作用在回报\(Z(s,a)\)的价值分布上,而不是它的期望。
学习\(Z(s,a)\)的概率分布,以此取代它的期望函数\(Q(s,a)\),有以下几个优势:
- 学习到的概率分布所含信息比期望值要丰富。当两个动作期望值相同时,可以选择方差较小的动作
- 针对一些稀疏奖励的场景,使用价值分布可以有效缓解
- 只考虑期望值,可能会忽略再某一状态下回报显著的动作,导致学习陷入次优策略
Value Distribution
使用一个随机变量\(Z(s,a)\)替代\(Q(s,a)\),\(Z(s,a)\)用于表示回报的分布,被称为价值分布(value distribution),它们的关系式为
\]
\(x_t\sim P(\cdot|x_{t-1},a_{t-1},a_t\sim\pi(\cdot|x_t),x_0=x,a_0=a)\)
同时,可以推出当前状态和下一状态的\(Z\)都服从同一分布\(D\),因此,定义transition算子\(\mathcal{P}^\pi\):
\]
\(s^\prime\sim P(\cdot|s,a),a^\prime\sim \pi(\cdot|s^\prime)\),\(P^\pi:Z\to Z\)
Policy Evaluation
根据公式(1)的Bellman方程,可以定义Bellman算子\(\mathcal{T}^\pi\),如下
\]
再结合公式(3),可以推出Bellman方程的分布式版本
\]
上式表示\(Z(s,a)\)和\(Z(s^\prime,a^\prime)\)都服从同一分布\(D\)。
衡量两个价值分布距离时,不光要考虑\(Z\)本身的随机性,还需要考虑输入自变量\(s\)和\(a\)。因此,该距离定义为:
\]
\(s^\prime \sim p(\cdot|s,a)\)
【注】上式式代替公式(2)来优化网络,但优化策略时仍然使用期望\(Q(s,a)\)。论文用Wassertein metric作为距离度量,并证明了在该度量下,通过分布式Bellman方程更新,最终都能收敛于真实的价值分布,即Bellman算子\(\mathcal{T}^\pi:Z\to Z\)可以看作\(\gamma\)收缩:\(\text{dist}(\mathcal{T}Q_1,\mathcal{T}Q_2)\le \gamma \text{dist}(Q_1,Q_2)\),由于\(Q^\pi\)是唯一不动点,即\(\mathcal{T}Q=Q\Leftrightarrow Q=Q^\pi\),所以在不考虑近似误差的情况下,使\(\mathcal{T}^\infty Q=Q^\pi\)。
Control
最优策略的定义是使回报期望最大的策略,因此,最优策略对应的价值分布也应是最优的。在只考虑期望的时候,最优策略是没有歧义的,也就是说,选择的最优价值函数只有一个,即唯一不动点\(Q^\pi\)(Banach's Fixed Point Theorem)。但考虑价值分布时,会存在期望值相同的同等最优价值分布,因此存在一族不稳定的最优价值分布。论文中对所有最优策略排序,只允许存在一个最优策略,即可产生一个唯一不动点\(Z^{\pi^*}\)。
Implement
本文提出通过多个支持构建的离散分布表示价值分布,且\(Z\)和\(Z'\)共享相同的离散支持集。这种离散分布的优点是表现力强(即它可以表示任何类型的分布,不限于高斯分布)。
此外,因为Wassertein距离作为度量难以实现,所以改用交叉熵损失优化网络。
实现原理:
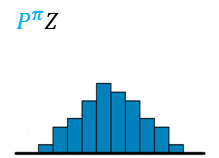
- 构建\(Z(s^\prime,a^\prime)\)价值分布模型,将价值分布的区间\([V_\text{MIN},V_\text{MAX}]\)分为N等分,每份间距为\(\triangle z=\frac{V_\text{MAX}-V_\text{MIN}}{N-1}\),得到一个离散支持的原子集\(\{z_i=V_{\rm MIN}+i \triangle z,0\le i<N \}\),图示如下
然后,用参数化模型\(\theta:\mathcal{S}\times\mathcal{A}\to\mathbb{R}^N\)得到原子概率
\]
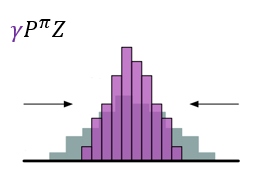
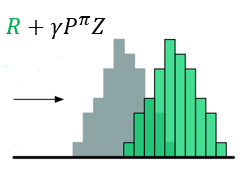
- 对\(Z(s',a')\)先用\(\gamma\)进行缩放,再用\(R\)进行位移,得到目标分布
\]
图示如下
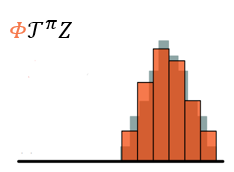
- \(\gamma\)是折扣回报,且奖励值不一定为\(\triangle z\)的整数倍,所以不能保证通过Bellman算子更新所得的\(Z(s^\prime,a^\prime)\)落在更新前相同值的原子上,因此,需要利用\(\Phi\)投影。
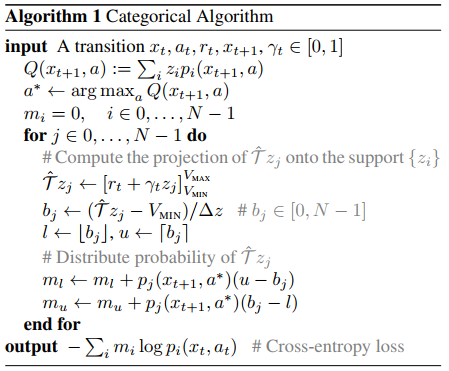
将样本Bellman更新\(\mathcal{\hat T} Z_\theta\)投影到\(Z_\theta\)的支持上,有效地将Bellman更新减少到多类别分类。给出采样转移\((s,a,r,s^\prime)\),可以计算出每个原子\(z_j\)的Bellman更新\(\mathcal{\hat T} z_j\doteq r+\gamma z_j\),然后分配其概率\(p_j(s^\prime,\pi(s^\prime))\)。因此,投影更新\(\Phi \hat{\mathcal{T}} Z_\theta(s,a)\)的第\(i\)个组成部分为
\]
其中,\([\cdot]_a^b\)将参数限制在范围\([a,b]\),\(\pi\)是贪心策略。图示如下
- 使用KL散度来约束两个分布
\]
最终,得到交叉熵损失函数
\]
C51算法:
Append
1. Wasserstein Metric
它用于衡量概率分布的累积分布函数距离。\(p\)-Wasserstein度量\(W_p(p\in[1,\infty])\)可以看作是逆累积分布函数的\(L^p\)度量。假设两个分布为\(U\)和\(V\),则\(p\)-Wasserstein距离为
\]
对于随机变量\(Y\),它的累积分布函数为\(F_Y(y)=\Pr(Y\le y)\),对应的逆累积分布函数为
\]
【注】对于\(p=\infty\),\(W_\infty(Y,U)=\sup_{\mathcal{w}\in [0,1]|F^{-1}_Y(\mathcal{w})-F^{-1}_U(\mathcal{w})|}\)
2. KL散度与交叉熵损失
对于离散情况,\(p\)和\(q\)分布的KL散度为
D_{KL}(p||q) &=\sum_{i=1}^N p(x_i)\log \frac{p(x_i)}{q(x_i)} \\
&=\sum_{i=1}^N p(x_i)[\log p(x_i)-\log q(x_i)] \\
&=-\sum_{i=1}^N p(x_i)\log q(x_i) + \sum_{i=1}^N p(x_i)\log p(x_i)\\
&=H(p,q)+H(p)
\end{aligned}\]
References
Marc G. Bellemare, Will Dabney, Rémi Munos. A Distributional Perspective on Reinforcement Learning. 2017.
Distributional Bellman and the C51 Algorithm
Distributional RL
最新文章
- 微信JS SDK配置授权,实现分享接口
- Objective-c防止数组越界而崩溃(全局效果)
- Java.lang.String 乱码反编译
- jetty简介
- 网格导入设置 Import settings for Meshes
- Lua,Lua API,配置文件
- 自己动手为PHP7添加新的语法特性
- SpringBoot Unable to start EmbeddedWebApplicationContext due to missing EmbeddedServletContainerFactory bean.
- SSM框架中前端页面(AJAX+Jquery+spring mvc+bootstrap)
- spark shuffle
- [spring transaction],service实现类中非事务方法直接调用自身事务方法导致事务无效的原因
- win+R启动列表
- python flask 如何修改默认端口号
- slecte下拉框的多选操作及获取值的 变化
- MDX Cookbook 07 - 在不同层次结构的成员中实现 逻辑 OR 的效果
- android gradle jnilibs
- Flappy Bird
- 分享一篇 Git Web 开发流程
- RocketMQ 事务消息
- AngularJS入门基础——控制器