VINS 估计器之外参初始化
2024-09-05 21:30:42
为何初始化外参
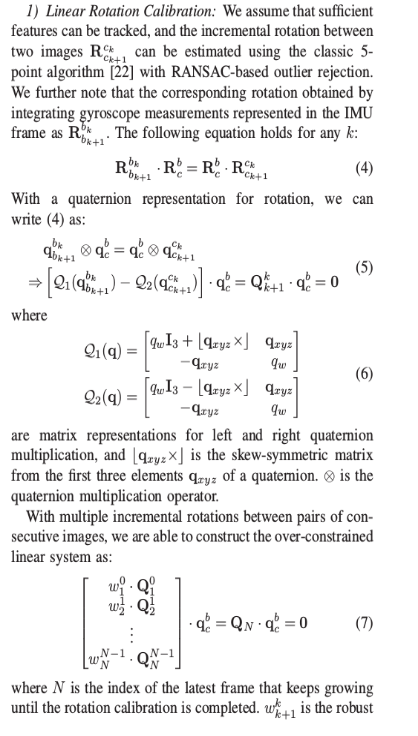
当外参完全不知道的时候,VINS也可以在线对其进行估计(rotation),先在processImage内进行初步估计,然后在后续优化时,会在optimize函数中再次优化。
如何初始化外参
外参校准函数为:
if(ESTIMATE_EXTRINSIC == 2)
{
ROS_INFO("calibrating extrinsic par am, rotation movement is needed");
if (frame_count != 0)
{
vector<pair<Vector3d, Vector3d>> corres = f_manager.getCorresponding(frame_count - 1, frame_count);
Matrix3d calib_ric;
if (initial_ex_rotation.CalibrationExRotation(corres, pre_integrations[frame_count]->delta_q, calib_ric))
{
ROS_WARN("initial extrinsic rotation calib success");
ROS_WARN_STREAM("initial extrinsic rotation: " << endl << calib_ric);
//有几个相机,就有几个ric,目前单目情况下,ric内只有一个值
ric[0] = calib_ric;
RIC[0] = calib_ric;
//如果校准成功就设置flag为1
ESTIMATE_EXTRINSIC = 1;
}
}
}
核心函数在initial_ex_rotaion.cpp内
bool InitialEXRotation::CalibrationExRotation(vector<pair<Vector3d, Vector3d>> corres, Quaterniond delta_q_imu, Matrix3d &calib_ric_result)
{
frame_count++;
//计算前后两帧的旋转矩阵,加到Rc向量内,直到校准成功
Rc.push_back(solveRelativeR(corres));
Rimu.push_back(delta_q_imu.toRotationMatrix());
Rc_g.push_back(ric.inverse() * delta_q_imu * ric);
Eigen::MatrixXd A(frame_count * 4, 4);
A.setZero();
int sum_ok = 0;
for (int i = 1; i <= frame_count; i++)
{
Quaterniond r1(Rc[i]);
Quaterniond r2(Rc_g[i]);
double angular_distance = 180 / M_PI * r1.angularDistance(r2);
ROS_DEBUG(
"%d %f", i, angular_distance);
double huber = angular_distance > 5.0 ? 5.0 / angular_distance : 1.0;
++sum_ok;
Matrix4d L, R;
double w = Quaterniond(Rc[i]).w();
Vector3d q = Quaterniond(Rc[i]).vec();
L.block<3, 3>(0, 0) = w * Matrix3d::Identity() + Utility::skewSymmetric(q);
L.block<3, 1>(0, 3) = q;
L.block<1, 3>(3, 0) = -q.transpose();
L(3, 3) = w;
Quaterniond R_ij(Rimu[i]);
w = R_ij.w();
q = R_ij.vec();
R.block<3, 3>(0, 0) = w * Matrix3d::Identity() - Utility::skewSymmetric(q);
R.block<3, 1>(0, 3) = q;
R.block<1, 3>(3, 0) = -q.transpose();
R(3, 3) = w;
A.block<4, 4>((i - 1) * 4, 0) = huber * (L - R);
}
JacobiSVD<MatrixXd> svd(A, ComputeFullU | ComputeFullV);
Matrix<double, 4, 1> x = svd.matrixV().col(3);
Quaterniond estimated_R(x);
ric = estimated_R.toRotationMatrix().inverse();
//cout << svd.singularValues().transpose() << endl;
//cout << ric << endl;
Vector3d ric_cov;
ric_cov = svd.singularValues().tail<3>();
if (frame_count >= WINDOW_SIZE && ric_cov(1) > 0.25)
{
calib_ric_result = ric;
return true;
}
else
return false;
}
通过SVD解旋转外参原理如下:
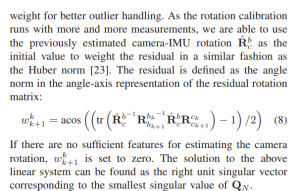
SVD的原理与应用可参考博客。
通过计算匹配图像之间的的本质矩阵得到旋转矩阵
Matrix3d InitialEXRotation::solveRelativeR(const vector<pair<Vector3d, Vector3d>> &corres)
{
if (corres.size() >= 9)
{
vector<cv::Point2f> ll, rr;
for (int i = 0; i < int(corres.size()); i++)
{
ll.push_back(cv::Point2f(corres[i].first(0), corres[i].first(1)));
rr.push_back(cv::Point2f(corres[i].second(0), corres[i].second(1)));
}
cv::Mat E = cv::findFundamentalMat(ll, rr);
cv::Mat_<double> R1, R2, t1, t2;
decomposeE(E, R1, R2, t1, t2);
if (determinant(R1) + 1.0 < 1e-09)
{
E = -E;
decomposeE(E, R1, R2, t1, t2);
}
//选出合适的R和T
double ratio1 = max(testTriangulation(ll, rr, R1, t1), testTriangulation(ll, rr, R1, t2));
double ratio2 = max(testTriangulation(ll, rr, R2, t1), testTriangulation(ll, rr, R2, t2));
cv::Mat_<double> ans_R_cv = ratio1 > ratio2 ? R1 : R2;
Matrix3d ans_R_eigen;
for (int i = 0; i < 3; i++)
for (int j = 0; j < 3; j++)
ans_R_eigen(j, i) = ans_R_cv(i, j);
return ans_R_eigen;
}
return Matrix3d::Identity();
}
double InitialEXRotation::testTriangulation(const vector<cv::Point2f> &l,
const vector<cv::Point2f> &r,
cv::Mat_<double> R, cv::Mat_<double> t)
{
cv::Mat pointcloud;
cv::Matx34f P = cv::Matx34f(1, 0, 0, 0,
0, 1, 0, 0,
0, 0, 1, 0);
cv::Matx34f P1 = cv::Matx34f(R(0, 0), R(0, 1), R(0, 2), t(0),
R(1, 0), R(1, 1), R(1, 2), t(1),
R(2, 0), R(2, 1), R(2, 2), t(2));
cv::triangulatePoints(P, P1, l, r, pointcloud);
int front_count = 0;
for (int i = 0; i < pointcloud.cols; i++)
{
double normal_factor = pointcloud.col(i).at<float>(3);
cv::Mat_<double> p_3d_l = cv::Mat(P) * (pointcloud.col(i) / normal_factor);
cv::Mat_<double> p_3d_r = cv::Mat(P1) * (pointcloud.col(i) / normal_factor);
if (p_3d_l(2) > 0 && p_3d_r(2) > 0)
front_count++;
}
ROS_DEBUG("MotionEstimator: %f", 1.0 * front_count / pointcloud.cols);
return 1.0 * front_count / pointcloud.cols;
}
//请参考视觉slam14讲第145页
void InitialEXRotation::decomposeE(cv::Mat E,
cv::Mat_<double> &R1, cv::Mat_<double> &R2,
cv::Mat_<double> &t1, cv::Mat_<double> &t2)
{
cv::SVD svd(E, cv::SVD::MODIFY_A);
cv::Matx33d W(0, -1, 0,
1, 0, 0,
0, 0, 1);
cv::Matx33d Wt(0, 1, 0,
-1, 0, 0,
0, 0, 1);
R1 = svd.u * cv::Mat(W) * svd.vt;
R2 = svd.u * cv::Mat(Wt) * svd.vt;
t1 = svd.u.col(2);
t2 = -svd.u.col(2);
}
最新文章
- Notepad++正则表达式语法
- PHP 生成验证码
- thinkPHP 5.0.x 使用SQLite3 进行缓存设置 Cache
- SYSTick 定时器
- Android test---CTS
- hdu1535 SPFA
- MySQL Cluster(MySQL 集群) 初试(转)
- Ubuntu下Apache+php+mysql网站架设详解
- 关于安装Android Studio的一些问题的解决方法
- 黑盒测试用例设计方法&理论结合实际 -> 判定表驱动法
- microsoft的罗马帝国——浪潮之巅
- Linux 系统下原版 texlive 2016 的安装与配置
- 前端开发中使用mac自带apache服务
- CBV源码分析
- 20175224 2018-2019-2 《Java程序设计》第六周学习总结
- javascript文档
- [原创]php任务调度器 hellogerard/jobby
- flask第三方插件WTForms
- 增强织梦DedeCMS“更新系统缓存”清理沉余缓存的功能
- LeetCode Design Compressed String Iterator
热门文章
- 【NOIP2015模拟11.3】备用钥匙
- poj 3352 : Road Construction 【ebcc】
- linux运维、架构之路-jumpserver
- UITableView和MJReFresh结合使用问题记录
- 软件安装——internal error2503/2502
- [CSP-S模拟测试]:array(单调栈)
- React-Native 之 GD (七)下拉刷新 及 上拉加载更多
- int 和 字节 相互转换
- NLog记录日志到本地或数据库
- tool 'xcodebuild' requires Xcode, but active developer directory '/Library/Developer/CommandLineTools' is a command line tools instance