2018-2019-1 20189215《Linux内核原理与分析》第三周作业
《庖丁解牛》第二章书本知识总结
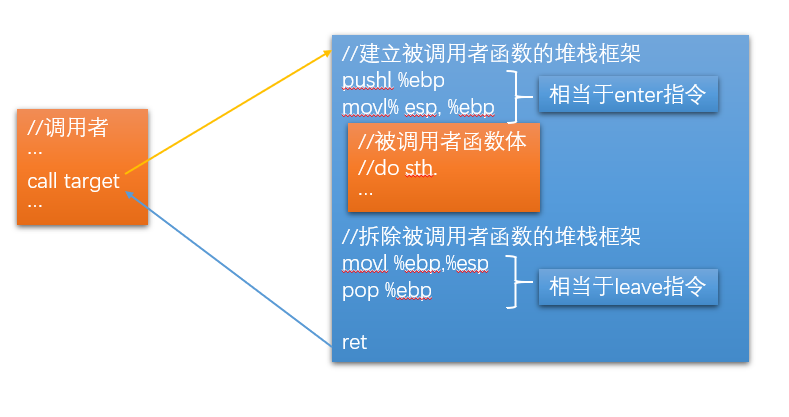
函数调用框架
call指令有两个作用:
(1) 将CS:EIP中下一条指令的地址A保存在栈顶;
(2)设置CS:EIP指向被调用程序的第一行。
ret指令在被调用函数完成之后,将地址A恢复到CS:EIP中。
传递参数
因为存储参数使用堆栈,根据后入先出的规则,传递参数的方法是从右到左依次压栈。计算机的3大法宝:存储程序计算机、函数调用堆栈机制、中断。
内嵌汇编语法规则
asm volatile (
汇编语句:
输出部分: //需要在行首加上冒号:
输入部分: //需要在行首加上冒号:
破环描述部分
)
(1)volatile是告诉编译器不要优化代码
(2)汇编代码嵌入时和直接方式有些许不同,体现在%转义符号。寄存器前面会有两个%,而%加数字则表示在输出部分、输入部分、破环描述部分的编号,从零开始,最高到总个数-1。
(3)一些符号
"c"、"d"等符号分别表示寄存器
ecx、edx。
"r"表示将输入变量放到通用寄存器,也就是eax、ebx、ecx、edx、esi、edi中的一个。
"="表示操作数在指令中是只写的,输出操作数。
"+"表示输入输出操作数是读写类型的。
"m"表示内存变量。
实验:mykernel时间片轮转多道程序内核
- 进入实验楼实验,在终端中分别输入以下命令
cd LinuxKernel/linux-3.9.4
rm -rf mykernel
patch -p1 < ../mykernel_for_linux3.9.4sc.patch //打补丁
make allnoconfig
make //编译内核时间较长
qemu -kernel arch/x86/boot/bzImage
make过程如下图:
make成功后mykernel运行:
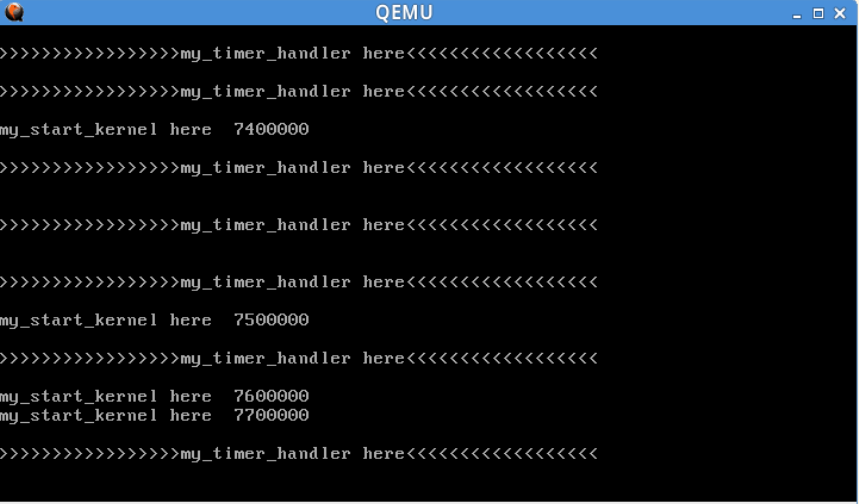
- 在mykernel的基础上添加
mypcb.h,修改mymain.c和myinterrupt.c文件,实现一个简单的操作系统内核,设置为时钟中断发生100次时,将需要调度的flagmy_need_sched设置为1。运行结果如下:

mykernel时间片轮转代码分析
实验中,基于mykernel,添加了
mypcb.h,修改mymain.c和myinterrupt.c文件,下面对这三个文件的代码进行分析。
- mypcb.h头文件
#define MAX_TASK_NUM 4
#define KERNEL_STACK_SIZE 1024*8
/* CPU-specific state of this task */
struct Thread {
unsigned long ip; //对应eip
unsigned long sp; //对应esp
};
typedef struct PCB{
int pid; //定义进程id
volatile long state; //-1 unrunnable, 0 runnable, >0 stopped
char stack[KERNEL_STACK_SIZE]; //内核堆栈
/* CPU-specific state of this task */
struct Thread thread;
unsigned long task_entry; //入口
struct PCB *next;
}tPCB;
void my_schedule(void); //声明调度函数
这段代码主要定义了进程控制块PCB,包括:
pid:进程id
state:进程状态,初始化值就是-1,如果被调度运行起来,其值就会变成0 ,被终端后,其值>0
stack:本进程使用的堆栈
thread:当前正在执行的线程信息
task_entry:进程入口函数
next:指向下一个PCB,实验环境中所有的PCB是以链表的形式组织起来的。
- mymain.c文件
#include <linux/types.h>
#include <linux/string.h>
#include <linux/ctype.h>
#include <linux/tty.h>
#include <linux/vmalloc.h>
#include "mypcb.h"
tPCB task[MAX_TASK_NUM]; //PCB的数组task
tPCB * my_current_task = NULL; //当前task指针
volatile int my_need_sched = 0; //是否需要调度
void my_process(void); //my_process函数声明
void __init my_start_kernel(void) //mykernel内核代码的入口
{
int pid = 0;
int i;
/* 初始化0号进程*/
task[pid].pid = pid;
task[pid].state = 0;/* -1 unrunnable, 0 runnable, >0 stopped */
task[pid].task_entry = task[pid].thread.ip = (unsigned long)my_process;
task[pid].thread.sp = (unsigned long)&task[pid].stack[KERNEL_STACK_SIZE-1];
task[pid].next = &task[pid];
/*fork其他进程 */
for(i=1;i<MAX_TASK_NUM;i++)
{
memcpy(&task[i],&task[0],sizeof(tPCB));
task[i].pid = i;
task[i].state = -1;
task[i].thread.sp = (unsigned long)&task[i].stack[KERNEL_STACK_SIZE-1];
task[i].next = task[i-1].next;
task[i-1].next = &task[i];
}
/* 用task[0]开始0号进程 */
pid = 0;
my_current_task = &task[pid];
asm volatile(
"movl %1,%%esp\n\t" /* set task[pid].thread.sp to esp */
"pushl %1\n\t" /* push ebp */
"pushl %0\n\t" /* push task[pid].thread.ip */
"ret\n\t" /* pop task[pid].thread.ip to eip */
"popl %%ebp\n\t"
:
: "c" (task[pid].thread.ip),"d" (task[pid].thread.sp) /* input c or d mean %ecx/%edx*/
);
}
void my_process(void)
{
int i = 0;
while(1)
{
i++;
if(i%10000000 == 0)
{
printk(KERN_NOTICE "this is process %d -\n",my_current_task->pid);
if(my_need_sched == 1) //判断是否需要调度
{
my_need_sched = 0;
my_schedule(); //这是一个主动调度
}
printk(KERN_NOTICE "this is process %d +\n",my_current_task->pid);
}
}
}
本实验环境中,mykernel是内核代码的入口,负责初始化内核的各个组成部分,在实际的Linux内核中,入口为init/main.c中的start_kernel(void)函数。
在本实验环境中,每个进程的函数都是 my_process函数,进程在运行中打印当前进程号,并通过my_need_sched变量判断是否需要调度,这是在myinterrupt.c文件中进行赋值的一个变量。
下面对0号进程的启动进行分析:
1"movl %1,%%esp\n\t" %1指第2个输入输出"d" (task[pid].thread.sp),将进程的栈顶位置存入ESP寄存器
2"pushl %1\n\t" 将task[0].thread.sp压栈,即保存当前EBP值
3"pushl %0\n\t" 将task[0].thread.ip压栈,当前进程的EIP值入栈
4"ret\n\t" 将栈顶值取出到EIP寄存器,即刚刚入栈的0号进程ip值
5 "popl %%ebp\n\t" 在执行完其他进程之后,回到0号进程,释放栈空间
6 : 没有输出
7 : "c" (task[pid].thread.ip),"d" (task[pid].thread.sp) 输入,将0号进程的ip、sp值分别存入ecx、edx寄存器中。
- myinterrupt.c文件
#include <linux/types.h>
#include <linux/string.h>
#include <linux/ctype.h>
#include <linux/tty.h>
#include <linux/vmalloc.h>
#include "mypcb.h"
extern tPCB task[MAX_TASK_NUM]; //extern引用全局变量
extern tPCB * my_current_task;
extern volatile int my_need_sched;
volatile int time_count = 0;
void my_timer_handler(void) //时钟中断触发本函数
{
#if 1
if(time_count%100 == 0 && my_need_sched != 1) //当时钟中断发生100次,并且my_need_sched不为1时,赋值为1
{
printk(KERN_NOTICE ">>>my_timer_handler here<<<\n");
my_need_sched = 1;
}
time_count ++ ;
#endif
return;
}
void my_schedule(void)
{
tPCB * next; //下一进程
tPCB * prev; //当前进程
if(my_current_task == NULL
|| my_current_task->next == NULL)
{
return;
}
printk(KERN_NOTICE ">>>my_schedule<<<\n");
/* schedule */
next = my_current_task->next;
prev = my_current_task;
if(next->state == 0)/* -1 unrunnable, 0 runnable, >0 stopped */ //下一个进程可运行,执行进程切换
{
my_current_task = next;
printk(KERN_NOTICE ">>>switch %d to %d<<<\n",prev->pid,next->pid);
/* 切换进程 */
asm volatile(
"pushl %%ebp\n\t" /* save ebp */
"movl %%esp,%0\n\t" /* save esp */
"movl %2,%%esp\n\t" /* restore esp */
"movl $1f,%1\n\t" /* save eip */
"pushl %3\n\t"
"ret\n\t" /* restore eip */
"1:\t" /* next process start here */
"popl %%ebp\n\t"
: "=m" (prev->thread.sp),"=m" (prev->thread.ip)
: "m" (next->thread.sp),"m" (next->thread.ip)
);
}
else
{
next->state = 0;
my_current_task = next;
printk(KERN_NOTICE ">>>switch %d to %d<<<\n",prev->pid,next->pid);
/* switch to new process */
asm volatile(
"pushl %%ebp\n\t" /* save ebp */
"movl %%esp,%0\n\t" /* save esp */
"movl %2,%%esp\n\t" /* restore esp */
"movl %2,%%ebp\n\t" /* restore ebp */
"movl $1f,%1\n\t" /* save eip */
"pushl %3\n\t"
"ret\n\t" /* restore eip */
: "=m" (prev->thread.sp),"=m" (prev->thread.ip)
: "m" (next->thread.sp),"m" (next->thread.ip)
);
}
return;
}
myinterrupt.c包含my_timer_handler和my_schedule两个函数。 my_timer_handler每隔100次将my_need_sched赋值为1,等待mymain.c中my_process函数的主动调度。my_schedule保存恢复进程上下文。
切换进程的分析:
01 "pushl %%ebp\n\t 保存当前ebp到堆栈中
02 "movl %%esp,%0\n\t" 保存当前ESP到当前进程sp中
03 "movl %2,%%esp\n\t" esp指向下一个进程
04 "movl $1f,%1\n\t" 将1f存储到thread.ip中,$1f是标号“1:\t”处,再次调度到该进程时就会从1:开始执行
05 "pushl %3\n\t" 将下一个进程的ip入栈
06 "ret\n\t" eip指向下一个进程的起始地址,也做了一次出栈操作
07 "1:\t" 标号1:,即next进程开始执行的位置
08 "popl %%ebp\n\t" 待下一个进程执行完后释放栈空间,恢复现场
09 : "=m" (prev->thread.sp),"=m" (prev->thread.ip) %0、%1分别对应,m代表内存变量
10 : "m" (next->thread.sp),"m" (next->thread.ip) %2、%3分别对应
遇到的问题
- 实验中修改代码后,make找不到文件。
解决:修改代码是在/mykernel目录下进行修改的,make编译内核需要在LinuxKernel/linux-3.9.4目录下进行,修改完之后要cd ..。 - 不懂myinterrupt.c文件中
my_timer_handler函数在哪调用。
解决:仔细看了书上的35页,在实验环境中已经配置好了一个时钟中断,在时钟中断发生的时候就会调用一次该函数。 - 不懂
$1f的含义。
解决:查阅资料得知,"movl $1f,%1\n\t"是将进程原来的ip替换为$1f,是at&t的一种语法,f代表向后跳转(b表示向前,f表示向后),1f指的就是下一条指令,即当前进程的eip。
最新文章
- 【.net 深呼吸】跨应用程序域执行程序集
- IEEE 802.11p (WAVE,Wireless Access in the Vehicular Environment)
- 转载:Bootstrap之表格checkbox复选框全选
- 最牛逼android上的图表库MpChart(三) 条形图
- SOA问题处理
- 19.python笔记之Rabbitmq
- Howto add permanent static routes in Ubuntu
- START167 AND BOOT167
- 2015南阳CCPC E - Ba Gua Zhen 高斯消元 xor最大
- Ruby编码
- audio标签
- 【CSS初识】
- Oracle误删数据文件后出现oracle initialization or shutdown in progress解决
- word_count
- chrome主页被篡改为hao123 win10系统
- laravel migrate时报错:Syntax error or access violation: 1071 Specified key was too long; max key length is 767 bytes
- [luogu2446][bzoj2037][SDOI2008]Sue的小球【区间DP】
- 用itext合并多个pdf文件【转】【补】
- ubuntu中python3安装package
- Docker 部署 portainer