eclipse软件仿真操作
2024-08-28 23:25:50
1.编写程序代码(以SDRAM为例)
1.1 编写head.s汇编文件
.equ SDRAM_BASE, 0x30000000
.equ MEM_CTL_BASE, 0x48000000 .text
.global _start
_start:
bl disable_watch_dog
bl memsetup
bl copy_steppingstone_to_sdram
ldr pc,=on_sdram
on_sdram:
ldr sp,=0x34000000
bl main
halt_loop:
b halt_loop disable_watch_dog:
mov r1,#0x53000000
mov r2,#0x00
str r2,[r1]
mov pc,lr copy_steppingstone_to_sdram:
mov r1,#0x00
ldr r2,=SDRAM_BASE
mov r3,#*
:
ldr r4,[r1],#
str r4,[r2],#
cmp r1,r3
bne 1b
mov pc,lr memsetup:
mov r1,#MEM_CTL_BASE
adrl r2,mem_cfg_val
add r3,r1,#
:
ldr r4,[r2],#
ldr r4,[r1],#
cmp r1,r3
bne 1b
mov pc,lr .align
mem_cfg_val:
.long 0x22011110 @BWSCON
.long 0x00000700 @BANKCON0
.long 0x00000700 @BANKCON1
.long 0x00000700 @BANKCON2
.long 0x00000700 @BANKCON3
.long 0x00000700 @BANKCON4
.long 0x00000700 @BANKCON5
.long 0x00018005 @BANKCON6
.long 0x00018005 @BANKCON7
.long 0x008C07A3 @REFRESH
.long 0x000000B1 @BANKSIZE
.long 0x00000030 @MRSRB6
.long 0x00000030 @MRSRB7
1.2 编写led.c C程序文件
#define GPBCON *((volatile unsigned long*)0x56000010)
#define GPBDAT *((volatile unsigned long*)0x56000014) int main()
{
GPBCON=0x00000400;
GPBDAT=0x00000000; return ;
}
1.3 编写makefile文件
all:head.o led.o
arm-linux-ld -Ttext 0x30000000 led.o head.o -o sdram.elf
arm-linux-objcopy -O binary -S sdram.elf sdram.bin
arm-linux-objdump -D -m arm sdram.elf > sdram.dis
head.o:head.s
arm-linux-gcc -g -c head.s
led.o:led.c
arm-linux-gcc -g -c led.c
clean:
rm -f sdram.dis sdram.bin sdram.elf *.o
注:必须用all否则编译会报错
2.编译
打开eclipse->project->build all 没有错误可以进行下一步
3.连接JLink
dongry@d-linux:~$ cd arm-tools
dongry@d-linux:~/arm-tools$ ls
ARM-tools
dongry@d-linux:~/arm-tools$ cd ARM-tools
dongry@d-linux:~/arm-tools/ARM-tools$ ls
arm-linux-gcc-4.3.2.tgz eclipse-cpp-helios-SR2-linux-gtk.tar.gz
arm-linux-gdb-7.5 JLink_Linux_V434a
dnw JLink_Linux_V434a.tgz
dnw_usb.ko
dongry@d-linux:~/arm-tools/ARM-tools$ cd JLink_Linux_V434a
dongry@d-linux:~/arm-tools/ARM-tools/JLink_Linux_V434a$ ls
45-jlink.rules JLinkGDBServer libjlinkarm.so.4.34.1 start
JLinkExe libjlinkarm.so. README
dongry@d-linux:~/arm-tools/ARM-tools/JLink_Linux_V434a$ ./JLinkGDBServer //运行JLink
SEGGER J-Link GDB Server V4.34a JLinkARM.dll V4.34a (DLL compiled Aug ::)
4.配置eclipse
虫子->debug configureation->双击Zylin Embedded debug(Native)->单击New_configuration
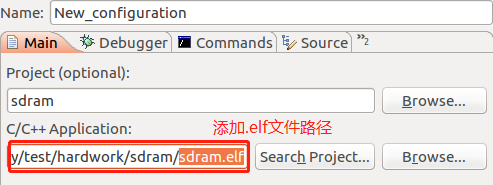
配置1:main(添加.elf文件)
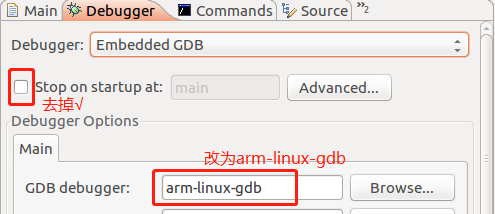
配置2:debugger
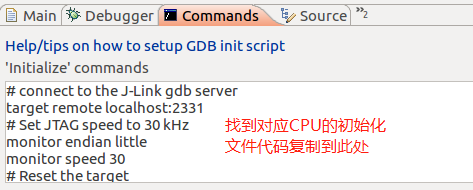
配置3:command(复制粘贴初始化脚本)
最新文章
- Centos7 and docker practices
- C++ 之 auto_ptr and shared_ptr
- 关于Animation动画事件的几项测试
- Hdu 4514 湫湫系列故事——设计风景线
- Google Map API 学习2-界面展示
- [置顶] 【Git入门之十三】Ubuntu和git
- Delphi控件大全:www.vclcomponents.com
- 计算阶乘并显示_winform (20以后的阶乘溢出)
- Glide加载圆形图片
- HDU -2100-Lovekey
- js文字滚动效果实现
- opencv3+版本感觉还是不稳定啊
- HTML5无插件多媒体Media——音频audio与视频video
- flask 上传文件
- 翻转一个数组(c++实现)
- java中变量关系
- ML.NET 0.10特性简介
- Ubuntu 12.04图形界面不能登录问题
- Java集合:HashSet的源码分析
- redis 集群模式安装