红外解码编码学习----verilog
2024-10-18 23:29:20
在设计中运用红外遥控器可以很好的解决按键缺少的问题,还可以方便的控制产品。
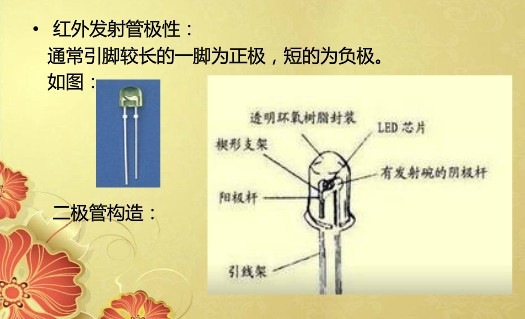
红外发射部分:
红外发射管:

判断红外发射管的好坏
 :
:
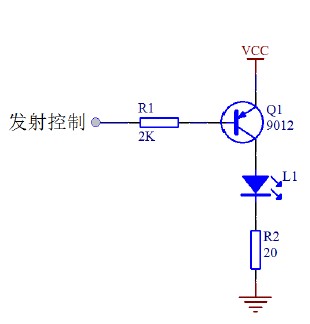
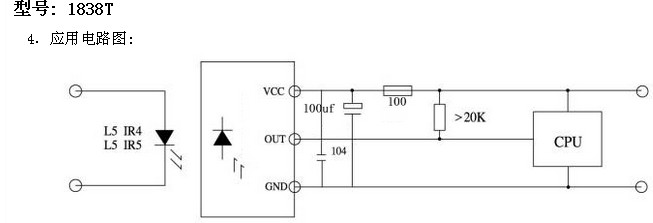
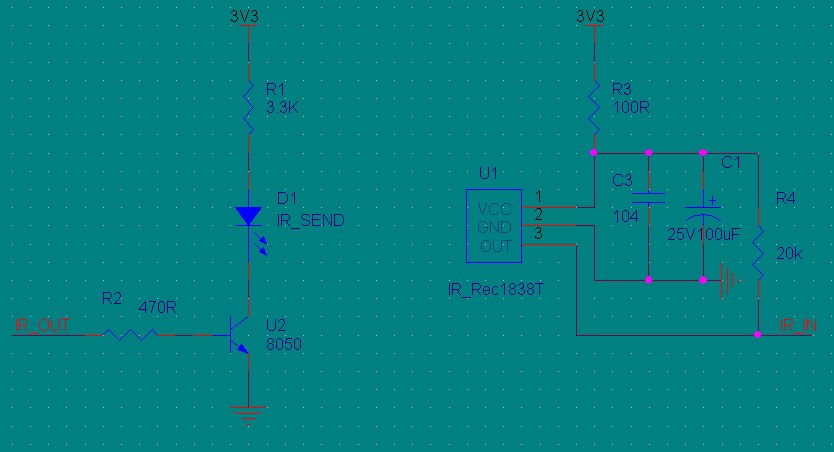
电路原理图:

接收部分:

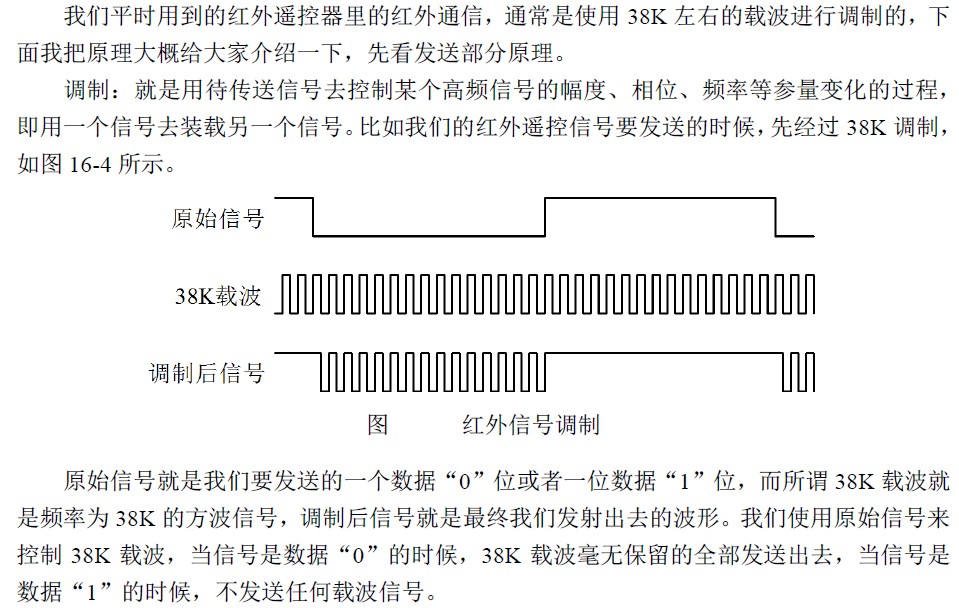
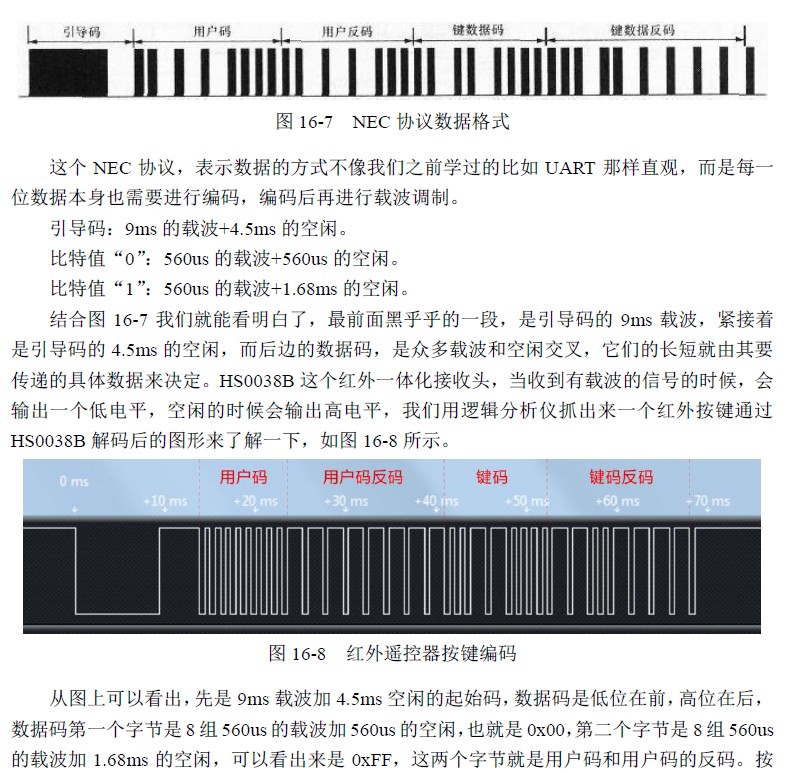
传输的NEC协议:

本实验电路:
verilog 程序:
发送程序:
/********************************Copyright**************************************
**----------------------------File information--------------------------
** File name :IR_send.v
** CreateDate :2015.06
** Funtions :红外信号的发送程序,发送格式:引导码+8bit用户码+8bit用户反码(或者用户反码)+8bit数据码+8bit用户反码+结束码
** Operate on :M5C06N3L114C7
** Copyright :All rights reserved.
** Version :V1.0
**---------------------------Modify the file information----------------
** Modified by :
** Modified data :
** Modify Content:
*******************************************************************************/
module IR_send (
clk,
rst_n,
key_1,
key_2,
IR_out,
led_1,
led_2,
led_3,
led_4
// testdata
);
input clk; //24M/20m
input rst_n;
input key_1;
input key_2;
output IR_out;
output reg led_1;
output reg led_2;
output led_3;
output led_4;
// output [7;0] testdata;
//-------------------//
`define CLK_20M
// `define CLK_24M
// `define CLK_50M
`ifdef CLK_20M
parameter t_38k = 'd526;
parameter t_38k_half = 'd263;
parameter t_9ms = 'd179999;
parameter t_4_5ms = 'd89999;
parameter t_13_5ms = 'd269999;
parameter t_560us = 'd11199;
parameter t_1_12ms = 'd22399;
parameter t_1_68ms = 'd33599;
parameter t_2_24ms = 'd44799;
`endif
`ifdef CLK_24M
parameter t_38k = 'd630;
parameter t_38k_half = 'd315;
parameter t_9ms = 'd215999;
parameter t_4_5ms = 'd107999;
parameter t_13_5ms = 'd323999;
parameter t_560us = 'd13439;
parameter t_1_12ms = 'd26879;
parameter t_1_68ms = 'd40319;
parameter t_2_24ms = 'd53759;
`endif
`ifdef CLK_50M
parameter t_38k = 'd1315;
parameter t_38k_half = 'd657;
parameter t_9ms = 'd449999;
parameter t_4_5ms = 'd224999;
parameter t_13_5ms = 'd674999;
parameter t_560us = 'd27999;
parameter t_1_12ms = 'd55999;
parameter t_1_68ms = 'd83999;
parameter t_2_24ms = 'd111999;
`endif
parameter DATA_USER = 'h00;
//---------------------------------//
//分频38Khz时钟
reg [:] cnt1;
wire clk_38k;
always @(posedge clk or negedge rst_n)
begin
if(!rst_n)
begin
cnt1 <= ;
end
else if(cnt1 == t_38k)
begin
cnt1 <= ;
end
else cnt1 <= cnt1 + ;
end
assign clk_38k = (cnt1<t_38k_half)?:;
//-------------------------------------------//
// wire key_1_flg;
// wire key_2_flg;
// key_shake U1(
// .clk_100M(clk),
// .rst_n(rst_n),
//
// .key_in(key_1),
// .key_out(key_1_flg)
// );
//
// key_shake U2(
// .clk_100M(clk),
// .rst_n(rst_n),
//
// .key_in(key_2),
// .key_out(key_2_flg)
// );
reg [:] key_1_flag;
wire key_1_neg;
wire key_1_pos;
always @(posedge clk or negedge rst_n)
begin
if(!rst_n)
begin
key_1_flag <= 'b000;
end
else
begin
key_1_flag <= {key_1_flag[:],key_1};
end
end
assign key_1_pos = (key_1_flag[:]== 'b01);
reg [:] key_2_flag;
wire key_2_neg;
wire key_2_pos;
always @(posedge clk or negedge rst_n)
begin
if(!rst_n)
begin
key_2_flag <= 'b000;
end
else
begin
key_2_flag <= {key_2_flag[:],key_2};
end
end
assign key_2_pos = (key_2_flag[:] == 'b01);
//------------------------------------------//
parameter IDEL = 'D0; //初始化状态,等待发送命令
parameter START = 'D1; //开始发送引导码
parameter SEND_USER = 'D2; //发送用户码
parameter SEND_UNUSER= 'D3; //发送用户反码
parameter SEND_DATA = 'D4; //发送数据
parameter SEND_UNDATA= 'D5; //发送数据反码
parameter FINISH = 'D6; //发送结束码
parameter FINISH_1 = 'D7; //发送结束
reg [:] state;
reg start_en;
wire start_over;
reg zero_en;
wire zero_over;
reg one_en;
wire one_over;
reg finish_en;
wire finish_over;
reg sendover;
reg [:] shiftdata;
reg [:] i;
reg [:] DATA;
always @(posedge clk or negedge rst_n)
begin
if(!rst_n)
begin
state <= IDEL;
start_en <= ;
zero_en <= ;
one_en <= ;
finish_en <= ;
sendover <= ;
shiftdata <= ;
i <= ;
DATA <= 'D0;
led_1 <= ;
led_2 <= ;
end
else
begin
case(state)
IDEL:
begin
start_en <= ;
zero_en <= ;
one_en <= ;
finish_en <= ;
sendover <= ;
shiftdata <= ;
i <= ;
DATA <= 'd0;
if(key_1_pos)
begin
state <= START;
DATA <= 'd1;
end
else if(key_2_pos)
begin
state <= START;
DATA <= 'd2;
end
else state <= IDEL;
end
START: //发送引导码
begin
if(start_over)
begin
start_en <= ;
state <= SEND_USER;
shiftdata <= DATA_USER;
end
else
begin
start_en <= ;
state <= START;
end
end
SEND_USER:
begin
// led_3 <= 1;
if((i==)&&(one_over||zero_over)) //结束位
begin
i <=;
shiftdata <= ~DATA_USER;
state <= SEND_UNUSER;
one_en <= ;
zero_en <= ;
end
else
begin
if(zero_over||one_over) //1bit发送结束
begin
i <= i + ;
one_en <= ;
zero_en <= ;
end
else if(shiftdata[i])
begin
one_en <= ;
end
else if(!shiftdata[i]) zero_en <= ;
else
begin
i <= i ;
one_en <= one_en;
zero_en <= zero_en;
end
end
end
SEND_UNUSER:
begin
led_1 <= ~led_1;
if((i==)&&(one_over||zero_over)) //结束位
begin
i <=;
state <= SEND_DATA;
shiftdata <= DATA;
one_en <= ;
zero_en <= ;
end
else
begin
if(zero_over||one_over) //1bit发送结束
begin
i <= i + ;
one_en <= ;
zero_en <= ;
end
else if(shiftdata[i])
begin
one_en <= ;
end
else if(!shiftdata[i]) zero_en <= ;
else
begin
i <= i ;
one_en <= one_en;
zero_en <= zero_en;
end
end
end
SEND_DATA:
begin
led_2 <= ~led_2 ;
if((i==)&&(one_over||zero_over)) //结束位
begin
i <=;
state <= SEND_UNDATA;
shiftdata <= ~DATA;
one_en <= ;
zero_en <= ;
end
else
begin
if(zero_over||one_over) //1bit发送结束
begin
i <= i + ;
one_en <= ;
zero_en <= ;
end
else if(shiftdata[i])
begin
one_en <= ;
end
else if(!shiftdata[i]) zero_en <= ;
else
begin
i <= i ;
one_en <= one_en;
zero_en <= zero_en;
end
end
end
SEND_UNDATA:
begin
if((i==)&&(one_over||zero_over)) //结束位
begin
i <=;
shiftdata <= ;
state <= FINISH;
one_en <= ;
zero_en <= ;
end
else
begin
if(zero_over||one_over) //1bit发送结束
begin
i <= i + ;
one_en <= ;
zero_en <= ;
end
else if(shiftdata[i])
begin
one_en <= ;
end
else if(!shiftdata[i]) zero_en <= ;
else
begin
i <= i ;
one_en <= one_en;
zero_en <= zero_en;
end
end
end
FINISH:
begin
if(finish_over)
begin
finish_en <= ;
state <= FINISH_1;
end
else
begin
finish_en <= ;
state <= FINISH;
end
end
FINISH_1:
begin
sendover <= ;
state <= IDEL;
end
default: state <= IDEL;
endcase
end
end
//----------------------------------------------//
//引导码,9ms载波加4.5ms空闲
reg [:] cnt2;
wire start_flag;
always @(posedge clk or negedge rst_n)
begin
if(!rst_n)
begin
cnt2 <= ;
end
else if(start_en)
begin
if(cnt2 >= t_13_5ms) cnt2 <= t_13_5ms+;
else cnt2 <= cnt2 + ;
end
else cnt2 <= ;
end
assign start_over = (cnt2 == t_13_5ms)?:;
assign start_flag = (start_en&&(cnt2 <= t_9ms))?:;
//----------------------------------------------//
//比特0, 560us载波 + 560us空闲
reg [:] cnt3;
wire zero_flag;
always @(posedge clk or negedge rst_n)
begin
if(!rst_n)
begin
cnt3 <= ;
end
else if(zero_en)
begin
if(cnt3 >= t_1_12ms) cnt3 <= t_1_12ms+;
else cnt3 <= cnt3 + ;
end
else cnt3 <= ;
end
assign zero_over = (cnt3 == t_1_12ms)?:;
assign zero_flag = (zero_en&&(cnt3 <= t_560us))?:;
//----------------------------------------------//
//比特1, 560us载波 + 1.68ms空闲
reg [:] cnt4;
wire one_flag;
always @(posedge clk or negedge rst_n)
begin
if(!rst_n)
begin
cnt4 <= ;
end
else if(one_en)
begin
if(cnt4 >= t_2_24ms) cnt4 <= t_2_24ms+;
else cnt4 <= cnt4 + ;
end
else cnt4 <= ;
end
assign one_over = (cnt4 == t_2_24ms)?:;
assign one_flag = (one_en&&(cnt4 <= t_560us))?:;
//----------------------------------------------//
//结束码, 560us载波
reg [:] cnt5;
wire finish_flag;
always @(posedge clk or negedge rst_n)
begin
if(!rst_n)
begin
cnt5 <= ;
end
else if(finish_en)
begin
if(cnt5 >= t_560us) cnt5 <= t_560us+;
else cnt5 <= cnt5 + ;
end
else cnt5 <= ;
end
assign finish_over = (cnt5 == t_560us)?:;
assign finish_flag = (finish_en&&(cnt5 <= t_560us))?:;
//-----------------------------------//
wire ir_out;
assign ir_out = start_flag||zero_flag||one_flag||finish_flag;
assign IR_out = ir_out&&clk_38k;
assign led_3 = i[];
assign led_4 = i[];
endmodule
接收程序:
/********************************Copyright**************************************
**----------------------------File information--------------------------
** File name :ir_resive.v
** CreateDate :2015.06
** Funtions : 中断接收程序。结束数据为:引导码+用户码+用户反码+数据码+数据反码。
** Operate on :M5C06N3L114C7
** Copyright :All rights reserved.
** Version :V1.0
**---------------------------Modify the file information----------------
** Modified by :
** Modified data :
** Modify Content:
*******************************************************************************/
module IR_resive (
clk,
rst_n,
ir_in,
led_error,
led_5,
led_6,
led_7,
test_data
);
input clk;
input rst_n;
input ir_in;
output led_error;
output led_5;
output led_6;
output led_7;
output [:] test_data;
//---------------------------------------------//
reg [:] ir_in_reg;
wire ir_in_pos;
wire ir_in_neg;
wire ir_in_change;
always @(posedge clk or negedge rst_n)
begin
if(!rst_n)
begin
ir_in_reg <= 'b111;
end
else
begin
ir_in_reg <= {ir_in_reg[:],ir_in};
end
end
assign ir_in_pos = (ir_in_reg[:] == 'b01)?1:0;
assign ir_in_neg = (ir_in_reg[:] == 'b10)?1:0;
assign ir_in_change = ir_in_pos|ir_in_neg;
//------------------------------------//
//设计分频和计数部分:从1838T的 技术手册中,可以得出最小的脉冲持续时间为500us,在采样时可以对最小的电平采样16次,即对500us采样16次,
//则每次的采样间隔时间是 500us/16=31.25us 时钟频率为FCLK = X MHZ, 则最小采样计数为:N =31.25*X,
//然后再用一个计数器计数同一电平的采样计数时间。
//最后判断是leader的9ms 还是4.5ms,或是数据的 0 还是 1。
//--------------------------------------------------------//
`define FCLK_20M
// `define FCLK_24M `
`ifdef FCLK_20M
parameter t_31_25us = 'd625;
parameter t_100k = ;
`endif
`ifdef FCLK_24M
parameter t_31_25us = 'd750; //
parameter t_100k = ;
`endif
`ifdef FCLK_50M
parameter t_31_25us = 'd1562; //
parameter t_100k = ;
`endif
parameter t_low_H = ;
parameter t_low_L = ; //16
parameter t_high_H=; //54 1.7MS左右
parameter t_high_L= ;
parameter t_9ms_H ='d398; //288
parameter t_9ms_L ='d278;
parameter t_4_5ms_H ='d154; //144
parameter t_4_5ms_L ='d134;
parameter t_watch = 'd500; //定时,计数达到500,则已经跑飞,
parameter t_1s = 'd31999;
//---------------------------------------------//
reg idel_flag;
reg [:] cnt;
always @(posedge clk or negedge rst_n)
begin
if(!rst_n)
begin
cnt <= ;
end
else if(idel_flag) cnt <= ; //空闲状态,不再变化
else if(ir_in_change) cnt <= ;
else if(cnt == t_31_25us) cnt <= ;
else cnt<= cnt + ;
end
reg [:] cnt1;
always @(posedge clk or negedge rst_n)
begin
if(!rst_n)
begin
cnt1 <= ;
end
else if(idel_flag) cnt1 <= ;
else if(ir_in_change) cnt1 <= ;
else if(cnt == t_31_25us) cnt1 <= cnt1 + ;
else cnt1 <= cnt1;
end
wire t_9ms_flag;
wire t_4_5_ms_flag;
wire short_flag; //短电平,可是高电平也可以是低电平
wire long_flag; //长电平,肯定是高电平
assign t_9ms_flag = ((cnt1 > t_9ms_L)&&(cnt1 < t_9ms_H));
assign t_4_5_ms_flag = ((cnt1 > t_4_5ms_L)&&(cnt1 < t_4_5ms_H));
assign long_flag = ((cnt1 > t_high_L)&&(cnt1 < t_high_H));
assign short_flag = ((cnt1 > t_low_L)&&(cnt1 < t_low_H));
wire watchdog;
assign watchdog = (cnt1 > t_watch)?:;
//---------------------------------------------//
parameter IDEL = 'd0;
parameter L_9MS = 'd1;
parameter L_4_5MS = 'd2;
parameter DATA_R = 'd4;
parameter FINISH_R= 'd8;
reg [:] state;
reg [:] shiftdata;
reg [:] n;
reg error_flag;
reg r_over;
reg [:] rdata;
always @(posedge clk or negedge rst_n)
begin
if(!rst_n)
begin
state <= IDEL;
shiftdata <= ;
n <= ;
error_flag <= ;
rdata <= ;
r_over<= ;
idel_flag <= ;
// led_5 <= 1;
// led_6 <= 1;
end
// else if(watchdog) state <= IDEL;
else
begin
case(state)
IDEL:
begin
idel_flag <= ; //空闲状态
shiftdata <= ;
n <= ;
error_flag <= ;
r_over<= ;
if(ir_in_reg[] ==)
begin
state <= L_9MS; //检测到拉低数据线
idel_flag <= ;
end
else state <= IDEL;
end
L_9MS: //9ms为低电平,数据线拉高时结束
begin
// led_5 <= 0;
if(watchdog) state <= IDEL;
else if(ir_in_pos)
begin
if(t_9ms_flag) state <= L_4_5MS;
else
begin
state <= IDEL;
error_flag <= ;
end
end
else state <= L_9MS;
end
L_4_5MS:
begin
if(watchdog) state <= IDEL;
else if(ir_in_neg)
begin
if(t_4_5_ms_flag) state <= DATA_R;
else
begin
state <= IDEL;
error_flag <= ;
end
end
else state <= L_4_5MS;
end
DATA_R:
begin
// led_6 <= 0;
if(watchdog) state <= IDEL;
else if((n == )&&(ir_in_reg[:] == 'b11)) state <= FINISH_R;
else if(ir_in_pos)
begin
if(short_flag) state <= DATA_R;
else
begin
state <= IDEL;
error_flag <= ;
end
end
else if(ir_in_neg)
begin
n<= n + ;
if(short_flag) shiftdata[n] <= ; //从低位到高位依次接收,这样数据的位置是 相反的
else if(long_flag) shiftdata[n] <= ; //从原来的{用户码,用户反码,数据,数据反码}变为{数据反码,数据,用户反码,用户码}
else //所以要调整数据位置
begin
state <= IDEL;
error_flag <= ;
end
end
else state <= DATA_R;
end
FINISH_R:
begin
r_over <= ;
rdata <= {shiftdata[:],shiftdata[:],shiftdata[:],shiftdata[:]}; //调整位置
state <= IDEL;
end
default:state <= IDEL;
endcase
end
end
//---------------------------------------------//
assign led_5 = (rdata[:] == 'h01)?0:1;
assign led_6 = (rdata[:] == 'h02)?0:1;
assign led_7 = (rdata[:] == 'h00)?0:1;
assign test_data = rdata[:];
// assign test_data = {error_flag,t_4_5_ms_flag,ir_in_change,ir_in_reg[1],state[3:0]};
endmodule
按键消抖(与以前有修改):
/********************************Copyright**************************************
**----------------------------File information--------------------------
** File name :key_shake.v
** CreateDate :2015.03
** Funtions : 按键的消抖操作:在复位之后的100us内,不响应按键的操作,在之后有按键按下后,有20ms的延迟,之后输出按键输出.
** Operate on :M5C06N3L114C7
** Copyright :All rights reserved[F].
** Version :V1.0
**---------------------------Modify the file information----------------
** Modified by :
** Modified data : 2015.04 2015.06
** Modify Content:V1.1:clk-->clk_100M, 常数声明放到一起,便于修改。 增加实用20Mclk,并将输出修改为连续高电平
*******************************************************************************/ module key_shake (
clk_100M,
rst_n, key_in,
key_out
);
input clk_100M; //100Mhz
input rst_n; input key_in;
output key_out; //-------------------------------------- //在复位之后的100us内,不响应按键的操作 // `define CLK_100M
`define CLK_20M `ifdef CLK_100M
parameter t_100us = 'd9999;
parameter t1ms = 'd99999; //定时1ms
parameter t_20ms = 'd20;
`endif `ifdef CLK_20M
parameter t_100us = 'd1999;
parameter t1ms = 'd19999; //定时1ms
parameter t_20ms = 'd20;
`endif reg [:] cnt;
reg key_en; //复位之后允许按键输入标志
always @(posedge clk_100M or negedge rst_n)
begin
if(!rst_n)
begin
cnt <= ;
key_en <=;
end
else
begin
if(cnt == t_100us)
begin
key_en <= ;
end
else
begin
key_en <= ;
cnt <= cnt + ;
end
end
end //--------------------------------------------------
wire HtoL_flag; //下降沿标志
wire LtoH_flag; //上升沿标志
reg [:] key_reg;
always @(posedge clk_100M or negedge rst_n)
begin
if(!rst_n)
begin
key_reg <= 'b111; //默认没按下状态为高,按下之后为低.反之则为3'b000;
end
else
begin
key_reg <= {key_reg[:],key_in};
end
end assign HtoL_flag = key_en?(key_reg[:] == 'b10):0; //下降沿检测,一个时钟的高电平
assign LtoH_flag = key_en?(key_reg[:] == 'b01):0; //上升沿检测,一个时钟的高电平
//---------------------------------------------
reg cnt_en; //计数使能标志 reg [:] cnt2;
always @(posedge clk_100M or negedge rst_n)
begin
if(!rst_n)
begin
cnt2 <= 'd0;
end
else if((cnt_en)&&(cnt2 == t1ms))
begin
cnt2 <= 'd0;
end
else if(cnt_en)
begin
cnt2 <= cnt2 + 'd1;
end
else
cnt2 <= 'd0;
end reg [:] cnt3;
always @(posedge clk_100M or negedge rst_n)
begin
if(!rst_n)
begin
cnt3 <= 'd0;
end
else if((cnt_en)&&(cnt2 == t1ms))
begin
if(cnt3 == t_20ms )
cnt3 <= t_20ms;
else
cnt3 <= cnt3 + ;
end
else if(!cnt_en)
cnt3 <= 'd0;
end //----------------------------------
//按键状态机
reg [:] i;
reg key_down; //按键按下标志
reg key_up; //按键释放标志
always @(posedge clk_100M or negedge rst_n)
begin
if(!rst_n)
begin
key_down <= ;
key_up <= ;
i <= ;
cnt_en <= ;
end
else
begin
case(i)
'd0:
begin
key_down <= ;
key_up <= ;
if(HtoL_flag) i <= 'd1; //检测到按下
else if(LtoH_flag) i <= 'd2; //检测到释放按键
else i <= 'd0;
end
'd1:
begin
if(cnt3 == t_20ms )
begin
if(!key_in) //检测到按键依然被按下
begin
key_down <= ; //按键按下成功
i <= 'd3;
cnt_en <= ;
end
else
begin
key_down <= ;
i <= 'd0;
cnt_en <= ;
end
end
else
cnt_en <= ;
end
'd2:
begin
if(cnt3 == t_20ms )
begin
if(key_in) //检测到按键被释放
begin
key_up <= ; //按键释放成功
i <= 'd4;
cnt_en <= ;
end
else
begin
key_up <= ;
i <= 'd0;
cnt_en <= ;
end
end
else
cnt_en <= ;
end
'd3:
begin
if(key_in)
begin
key_down <= ;
i <= 'd0;
end
else
i <= 'd3;
end
'd4:
begin
if(!key_in)
begin
key_up <= ;
i <= 'd0;
end
else
i <= 'd4;
end
default:i <= 'd0;
endcase
end
end assign key_out = key_down; //当按键被按下有效时
// assign key_out = key_up; //当按键被释放后才有效时
endmodule
将两个程序合在一起的顶层文件:
/********************************Copyright**************************************
**----------------------------File information--------------------------
** File name :IR_TOP.v
** CreateDate :2015.06
** Funtions : 中断的顶层文件
** Operate on :M5C06N3F256C7
** Copyright :All rights reserved.
** Version :V1.0
**---------------------------Modify the file information----------------
** Modified by :
** Modified data :
** Modify Content:
*******************************************************************************/
module IR_TOP (
clk,
rst_n,
ir_in,
ir_out,
key_1,
key_2,
led_d1,
led_d2,
led_d3,
led_d4,
led_d5,
led_d6,
led_d7,
led_d8,
test_data
);
input clk;
input rst_n;
input key_1;
input key_2;
input ir_in;
output ir_out;
output led_d1;
output led_d2;
output led_d3;
output led_d4;
output led_d5;
output led_d6;
output led_d7;
output led_d8;
output [:] test_data;
//---------------------------------------------//
wire key_1_flag;
wire key_2_flag;
key_shake U1(
.clk_100M(clk),
.rst_n(rst_n),
.key_in(key_1),
.key_out(key_1_flag)
);
key_shake U2(
.clk_100M(clk),
.rst_n(rst_n),
.key_in(key_2),
.key_out(key_2_flag)
);
wire [:] data_t;
IR_send u1(
.clk(clk),
.rst_n(rst_n),
.key_1(key_1_flag),
.key_2(key_2_flag),
.IR_out(ir_out),
.led_1(led_d1),
.led_2(led_d2),
.led_3(led_d3),
.led_4(led_d4)
);
IR_resive u2(
.clk(clk),
.rst_n(rst_n),
.ir_in(ir_in),
.led_error(led_d8),
.led_5(led_d5),
.led_6(led_d6),
.led_7(led_d7),
.test_data(data_t)
);
//---------------------------------------------//
assign test_data = data_t;
endmodule
仿真图:
接收仿真图:


发送仿真图:

最新文章
- 理解AX InventTrans的几种状态
- C语言程序设计第7堂作业
- 《CLR.via.C#第三版》第一部分读书笔记(一)
- struts2使用Convention Plugin在weblogic上以war包部署时,找不到Action的解决办法
- DispatcherHelper
- 动态规划(一)——最长公共子序列和最长公共子串
- zepto的tap事件的穿透分析
- Codeforces Gym 100418B 暴力
- ASP.NET中如何实现负载均衡
- [leetcode-495-Teemo Attacking]
- 使用phpExcel导出excel时,报500错
- RabbitMQ的应用场景以及基本原理介绍
- Identity Server 4 - Hybrid Flow - 保护API资源
- MS-DOS 6.22 +Vim+masm 汇编环境
- LOJ 6277-6280 数列分块入门 1-4
- L2-016. 愿天下有情人都是失散多年的兄妹(深搜)*
- HDU 4686 Arc of Dream(矩阵)
- [九省联考2018] 一双木棋 chess
- [aaronyang原创] Mssql 一张表3列的sql面试题,看你sql学的怎么样
- list转换为树结构--递归