如何使用 numpy 和 pytorch 快速计算 IOU
前言
在目标检测中用交并比(Interection-over-unio,简称 IOU)来衡量两个边界框之间的重叠程度,下面就使用 numpy 和 pytorch 两种框架的矢量计算方式来快速计算各种情况下的 IOU。
一对一
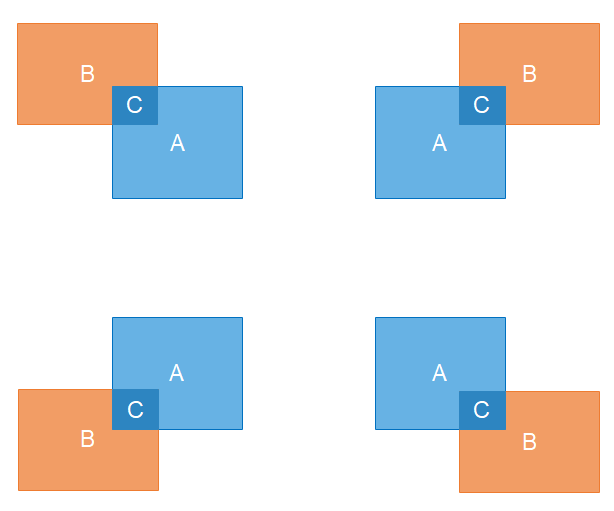
先来计算最简单的单框对单框的交并比。假设两个预测框 \(b_0=(x_{min0},\ y_{min0},\ x_{max0},\ y_{max0})\) 和 \(b_1=(x_{min1},\ y_{min1},\ x_{max1},\ y_{max1})\) ,固定 \(b_0\) 的位置不变,移动 \(b_1\),他们之间会有四种重叠情况,如下图所示,此时交并比计算公式为 \(IOU=C/(A+B-C)\),就是交集面积除以并集面积。虽然图中有四种重叠情况,但是计算的时候可以合并为一种 \(C=w_c*h_c\):
交集 \(C\) 的宽度 \(w_c=x_2-x_1\),其中 \(x_2=\min\{x_{max0},\ x_{max1}\}\),\(x_1=\max\{x_{min0},\ x_{min1} \}\);
交集 \(C\) 的高度 \(h_c=y_2-y_1\),其中 \(y_2=\min\{y_{max0},\ y_{max1}\}\),\(y_1=\max\{y_{min0},\ y_{min1} \}\);
numpy
def iou(box0: np.ndarray, box1: np.ndarray):
""" 计算一对一交并比
Parameters
----------
box0, box1: `~np.ndarray` of shape `(4, )`
边界框
"""
xy_max = np.minimum(box0[2:], box1[2:])
xy_min = np.maximum(box0[:2], box1[:2])
# 计算交集
inter = np.clip(xy_max-xy_min, a_min=0, a_max=np.inf)
inter = inter[0]*inter[1]
# 计算并集
area_0 = (box0[2]-box0[0])*(box0[3]-box0[1])
area_1 = (box1[2]-box1[0])*(box1[3]-box1[1])
union = area_0 + area_1- inter
return inter/union
pytorch
def iou(box0: torch.Tensor, box1: torch.Tensor):
""" 计算一对一交并比
Parameters
----------
box0, box1: Tensor of shape `(4, )`
边界框
"""
xy_max = torch.min(box0[2:], box1[2:])
xy_min = torch.max(box0[:2], box1[:2])
# 计算交集
inter = torch.clamp(xy_max-xy_min, min=0)
inter = inter[0]*inter[1]
# 计算并集
area_0 = (box0[2]-box0[0])*(box0[3]-box0[1])
area_1 = (box1[2]-box1[0])*(box1[3]-box1[1])
union = area_0 + area_1- inter
return inter/union
一对多
一对多的代码和一对一几乎是一模一样的,就是有一个参数多了一个维度而已。
numpy
def iou(box: np.ndarray, boxes: np.ndarray):
""" 计算一个边界框和多个边界框的交并比
Parameters
----------
box: `~np.ndarray` of shape `(4, )`
边界框
boxes: `~np.ndarray` of shape `(n, 4)`
其他边界框
Returns
-------
iou: `~np.ndarray` of shape `(n, )`
交并比
"""
# 计算交集
xy_max = np.minimum(boxes[:, 2:], box[2:])
xy_min = np.maximum(boxes[:, :2], box[:2])
inter = np.clip(xy_max-xy_min, a_min=0, a_max=np.inf)
inter = inter[:, 0]*inter[:, 1]
# 计算面积
area_boxes = (boxes[:, 2]-boxes[:, 0])*(boxes[:, 3]-boxes[:, 1])
area_box = (box[2]-box[0])*(box[3]-box[1])
return inter/(area_box+area_boxes-inter)
pytorch
def iou(box: torch.Tensor, boxes: torch.Tensor):
""" 计算一个边界框和多个边界框的交并比
Parameters
----------
box: Tensor of shape `(4, )`
一个边界框
boxes: Tensor of shape `(n, 4)`
多个边界框
Returns
-------
iou: Tensor of shape `(n, )`
交并比
"""
# 计算交集
xy_max = torch.min(boxes[:, 2:], box[2:])
xy_min = torch.max(boxes[:, :2], box[:2])
inter = torch.clamp(xy_max-xy_min, min=0)
inter = inter[:, 0]*inter[:, 1]
# 计算并集
area_boxes = (boxes[:, 2]-boxes[:, 0])*(boxes[:, 3]-boxes[:, 1])
area_box = (box[2]-box[0])*(box[3]-box[1])
return inter/(area_box+area_boxes-inter)
多对多
假设边界框矩阵 boxes0 的维度为 (A, 4),boxes1 的维度为 (B, 4),要计算这二者间的交并比,一种直观的想法是开个循环,一次从 boxes0 中拿出一个边界框 box,然后和 boxes1 里面的所有边界框计算交并比。但是在边界框很多的情况下,这种计算是很低效的。有没有什么办法可以代替循环呢?
来仔细思考一下:开循环的原因是我们不能像之前那样对两个边界框矩阵进行切片,然后计算 \([x_2, y_2]\) 以及 \([x_1, y_1]\)。所以我们只要想个办法能像之前那样切片就好了。 这时候就需要使用广播机制,将 boxes0 广播为 (A, B, 4) 维度的矩阵,boxes1 也广播为 (A, B, 4) 维度的矩阵。广播之后的 boxes0 任意沿着某行切下来的矩阵 boxes0[:, i, :]都是相同的(就是广播前的 boxes0),广播之后的 boxes1 沿着某一个通道切下来的矩阵 boxes1[i, :, :] 也是相同的。
numpy
def iou(boxes0: np.ndarray, boxes1: np.ndarray):
""" 计算多个边界框和多个边界框的交并比
Parameters
----------
boxes0: `~np.ndarray` of shape `(A, 4)`
边界框
boxes1: `~np.ndarray` of shape `(B, 4)`
边界框
Returns
-------
iou: `~np.ndarray` of shape `(A, B)`
交并比
"""
A = boxes0.shape[0]
B = boxes1.shape[0]
xy_max = np.minimum(boxes0[:, np.newaxis, 2:].repeat(B, axis=1),
np.broadcast_to(boxes1[:, 2:], (A, B, 2)))
xy_min = np.maximum(boxes0[:, np.newaxis, :2].repeat(B, axis=1),
np.broadcast_to(boxes1[:, :2], (A, B, 2)))
# 计算交集面积
inter = np.clip(xy_max-xy_min, a_min=0, a_max=np.inf)
inter = inter[:, :, 0]*inter[:, :, 1]
# 计算每个矩阵的面积
area_0 = ((boxes0[:, 2]-boxes0[:, 0])*(
boxes0[:, 3] - boxes0[:, 1]))[:, np.newaxis].repeat(B, axis=1)
area_1 = ((boxes1[:, 2] - boxes1[:, 0])*(
boxes1[:, 3] - boxes1[:, 1]))[np.newaxis, :].repeat(A, axis=0)
return inter/(area_0+area_1-inter)
pytorch
def iou(boxes0: Tensor, boxes1: Tensor):
""" 计算多个边界框和多个边界框的交并比
Parameters
----------
boxes0: Tensor of shape `(A, 4)`
边界框
boxes1: Tensor of shape `(B, 4)`
边界框
Returns
-------
iou: Tensor of shape `(A, B)`
交并比
"""
A = boxes0.size(0)
B = boxes1.size(0)
# 将先验框和边界框真值的 xmax、ymax 以及 xmin、ymin进行广播使得维度一致,(A, B, 2)
# 再计算 xmax 和 ymin 较小者、xmin 和 ymin 较大者,W=xmax较小-xmin较大,H=ymax较小-ymin较大
xy_max = torch.min(boxes0[:, 2:].unsqueeze(1).expand(A, B, 2),
boxes1[:, 2:].broadcast_to(A, B, 2))
xy_min = torch.max(boxes0[:, :2].unsqueeze(1).expand(A, B, 2),
boxes1[:, :2].broadcast_to(A, B, 2))
# 计算交集面积
inter = (xy_max-xy_min).clamp(min=0)
inter = inter[:, :, 0]*inter[:, :, 1]
# 计算每个矩形的面积
area_boxes0 = ((boxes0[:, 2]-boxes0[:, 0]) *
(boxes0[:, 3]-boxes0[:, 1])).unsqueeze(1).expand(A, B)
area_boxes1 = ((boxes1[:, 2]-boxes1[:, 0]) *
(boxes1[:, 3]-boxes1[:, 1])).broadcast_to(A, B)
return inter/(area_boxes0+area_boxes1-inter)
最新文章
- 基于webdriver的jmeter性能测试-通过jmeter实现jar录制脚本的性能测试
- android培训机构排名
- "数学口袋精灵"bug的发现及单元测试
- entity framework里的继承映射关系TPH、TPT和TPC
- MySQL的Grant命令
- C#获取友好时间差
- GreenDao 使用二
- Arch Linux安装Firefox 火狐中文版
- learning makefile 模式规则
- redis key命令
- tiny4412 --Uboot移植(5) DDR3内存
- Win10系统下如何禁止同步主机session?windows 10禁止同步主机session的方法
- iOS 第三方框架-MBProgressHUD
- Android开发6——布局中的wrap_content和fill_parent以及match_parent
- 汇编_指令_JMP
- Redis的安装和部署(windows )
- RabbitMQ入门:在Spring Boot 应用中整合RabbitMQ
- Spark Streaming性能调优详解(转)
- oracle解惑
- DIV中display和visibility属性差别
热门文章
- 「算法笔记」数位 DP
- Spring Boot 2 中的默认日志管理与 Logback 配置详解
- [数学]高数部分-Part VII 微分方程
- 基于GO语言的PBFT共识算法
- CSS基础 行内元素/行内块元素设置垂直对齐方式及常见使用案例
- python接口自动化,从excel取param的内容太多,使用eval转换报错'EOL while scanning string literal
- win10系统微软账号登陆错误报错误码0x80190001
- HBase环境搭建(hbase1.2.5+zookeeper3.4.6)
- 使用altium designer 21极坐标绘制异形焊盘 比如焊接螺母的 环绕焊盘
- kafka学习笔记(七)kafka的状态机模块