Neural Network模型复杂度之Residual Block - Python实现
背景介绍
Neural Network之模型复杂度主要取决于优化参数个数与参数变化范围. 优化参数个数可手动调节, 参数变化范围可通过正则化技术加以限制. 本文从优化参数个数出发, 以Residual Block技术为例, 简要演示Residual Block残差块对Neural Network模型复杂度的影响.算法特征
①. 对输入进行等维度变换; ②. 以加法连接前后变换扩大函数空间算法推导
典型残差块结构如下,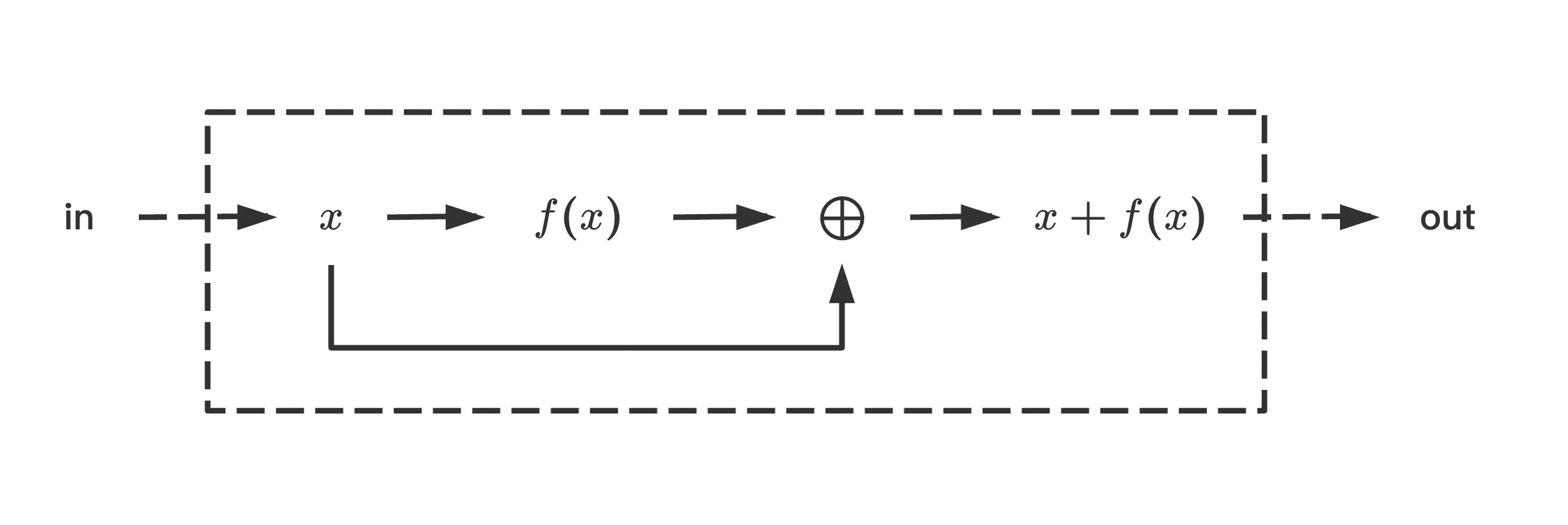
即, 输入\(x\)之函数空间通过加法\(x + f(x)\)扩大. 可以看到, 在前向计算过程中, 函数\(f(x)\)之作用类似于残差, 补充输入\(x\)对标准输出描述之不足; 同时, 在反向传播过程中, 对输入\(x\)之梯度计算分裂在不同影响链路上, 降低了函数\(f(x)\)对梯度的直接影响.
数据、模型与损失函数
数据生成策略如下,\[\left\{
\begin{align*}
x &= r + 2g + 3b \\
y &= r^2 + 2g^2 + 3b^2 \\
lv &= -3r - 4g - 5b
\end{align*}
\right.
\]Neural Network网络模型如下,
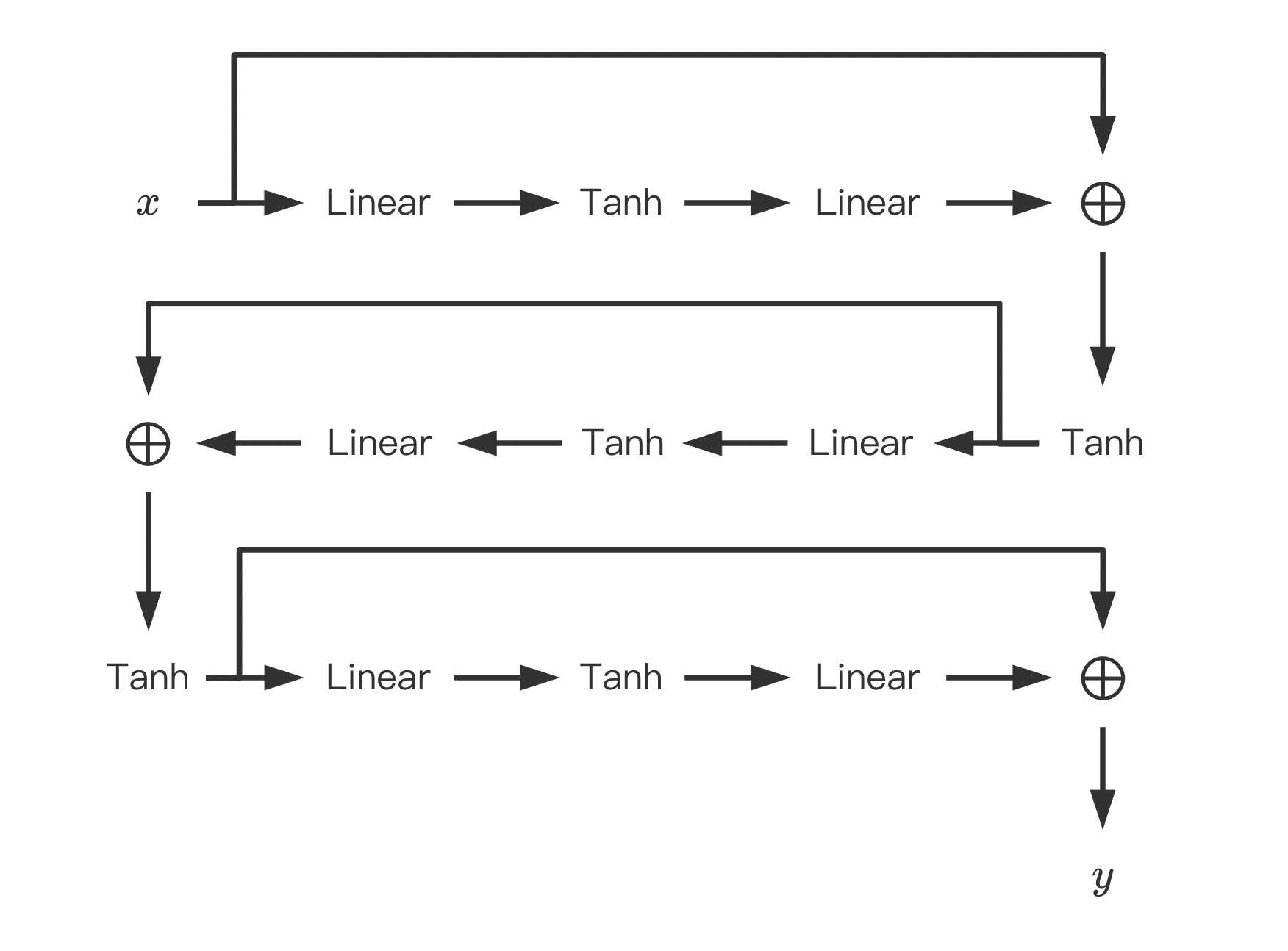
其中, 输入层\(x:=(r, g, b)\), 输出层\(y:=(x, y, lv)\), 中间所有隐藏层与输入之dimension保持一致.
损失函数如下,\[L = \sum_{i}\frac{1}{2}(\bar{x}^{(i)} - x^{(i)})^2 + \frac{1}{2}(\bar{y}^{(i)} - y^{(i)})^2 + \frac{1}{2}(\bar{lv}^{(i)} - lv^{(i)})^2
\]其中, \(i\)为data序号, \((\bar{x}, \bar{y}, \bar{lv})\)为相应观测值.
代码实现
本文以是否采用Residual Block为例(即在上述模型中是否去除\(\oplus\)), 观察Residual Block对模型复杂度的影响.code
import numpy
import torch
from torch import nn
from torch import optim
from torch.utils import data
from matplotlib import pyplot as plt numpy.random.seed(0) # 获取数据与封装数据
def xFunc(r, g, b):
x = r + 2 * g + 3 * b
return x def yFunc(r, g, b):
y = r ** 2 + 2 * g ** 2 + 3 * b ** 2
return y def lvFunc(r, g, b):
lv = -3 * r - 4 * g - 5 * b
return lv class GeneDataset(data.Dataset): def __init__(self, rRange=[-1, 1], gRange=[-1, 1], bRange=[-1, 1], \
num=100, transform=None, target_transform=None):
self.__rRange = rRange
self.__gRange = gRange
self.__bRange = bRange
self.__num = num
self.__transform = transform
self.__target_transform = target_transform self.__X = self.__build_X()
self.__Y_ = self.__build_Y_() def __build_Y_(self):
rArr = self.__X[:, 0:1]
gArr = self.__X[:, 1:2]
bArr = self.__X[:, 2:3]
xArr = xFunc(rArr, gArr, bArr)
yArr = yFunc(rArr, gArr, bArr)
lvArr = lvFunc(rArr, gArr, bArr)
Y_ = numpy.hstack((xArr, yArr, lvArr))
return Y_ def __build_X(self):
rArr = numpy.random.uniform(*self.__rRange, (self.__num, 1))
gArr = numpy.random.uniform(*self.__gRange, (self.__num, 1))
bArr = numpy.random.uniform(*self.__bRange, (self.__num, 1))
X = numpy.hstack((rArr, gArr, bArr))
return X def __len__(self):
return self.__num def __getitem__(self, idx):
x = self.__X[idx]
y_ = self.__Y_[idx]
if self.__transform:
x = self.__transform(x)
if self.__target_transform:
y_ = self.__target_transform(y_)
return x, y_ # 构建模型
class Model(nn.Module): def __init__(self, is_residual_block=True):
super(Model, self).__init__()
torch.random.manual_seed(0) self.__is_residual_block = is_residual_block
self.__in_features = 3
self.__out_features = 3 self.lin11 = nn.Linear(3, 3, dtype=torch.float64)
self.lin12 = nn.Linear(3, 3, dtype=torch.float64)
self.lin21 = nn.Linear(3, 3, dtype=torch.float64)
self.lin22 = nn.Linear(3, 3, dtype=torch.float64)
self.lin31 = nn.Linear(3, 3, dtype=torch.float64)
self.lin32 = nn.Linear(3, 3, dtype=torch.float64) def forward(self, X):
X1 = self.lin12(torch.tanh(self.lin11(X)))
if self.__is_residual_block:
X1 += X
X1 = torch.tanh(X1) X2 = self.lin22(torch.tanh(self.lin21(X1)))
if self.__is_residual_block:
X2 += X1
X2 = torch.tanh(X2) X3 = self.lin32(torch.tanh(self.lin31(X2)))
if self.__is_residual_block:
X3 += X2
return X3 # 构建损失函数
class MSE(nn.Module): def forward(self, Y, Y_):
loss = torch.sum((Y - Y_) ** 2)
return loss # 训练单元与测试单元
def train_epoch(trainLoader, model, loss_fn, optimizer):
model.train(True) loss = 0
with torch.enable_grad():
for X, Y_ in trainLoader:
optimizer.zero_grad() Y = model(X)
lossVal = loss_fn(Y, Y_)
lossVal.backward()
optimizer.step() loss += lossVal.item() loss /= len(trainLoader.dataset)
return loss def test_epoch(testLoader, model, loss_fn, optimzier):
model.train(False) loss = 0
with torch.no_grad():
for X, Y_ in testLoader:
Y = model(X)
lossVal = loss_fn(Y, Y_)
loss += lossVal.item()
loss /= len(testLoader.dataset)
return loss def train_model(trainLoader, testLoader, epochs=100):
model_RB = Model(True)
loss_RB = MSE()
optimizer_RB = optim.Adam(model_RB.parameters(), 0.001) model_No = Model(False)
loss_No = MSE()
optimizer_No = optim.Adam(model_No.parameters(), 0.001) trainLoss_RBList = list()
testLoss_RBList = list()
trainLoss_NoList = list()
testLoss_NoList = list()
for epoch in range(epochs):
trainLoss_RB = train_epoch(trainLoader, model_RB, loss_RB, optimizer_RB)
testLoss_RB = test_epoch(testLoader, model_RB, loss_RB, optimizer_RB)
trainLoss_No = train_epoch(trainLoader, model_No, loss_No, optimizer_No)
testLoss_No = test_epoch(testLoader, model_No, loss_No, optimizer_No) trainLoss_RBList.append(trainLoss_RB)
testLoss_RBList.append(testLoss_RB)
trainLoss_NoList.append(trainLoss_No)
testLoss_NoList.append(testLoss_No)
if epoch % 50 == 0:
print(epoch, trainLoss_RB, trainLoss_No, testLoss_RB, testLoss_No) fig = plt.figure(figsize=(5, 4))
ax1 = fig.add_subplot(1, 1, 1)
X = numpy.arange(1, epochs+1)
ax1.plot(X, trainLoss_RBList, "r-", lw=1, label="train with RB")
ax1.plot(X, testLoss_RBList, "r--", lw=1, label="test with RB")
ax1.plot(X, trainLoss_NoList, "b-", lw=1, label="train without RB")
ax1.plot(X, testLoss_NoList, "b--", lw=1, label="test without RB")
ax1.set(xlabel="epoch", ylabel="loss", yscale="log")
ax1.legend()
fig.tight_layout()
fig.savefig("loss.png", dpi=300)
plt.show() if __name__ == "__main__":
trainData = GeneDataset([-1, 1], [-1, 1], [-1, 1], num=1000, \
transform=torch.tensor, target_transform=torch.tensor)
testData = GeneDataset([-1, 1], [-1, 1], [-1, 1], num=300, \
transform=torch.tensor, target_transform=torch.tensor)
trainLoader = data.DataLoader(trainData, batch_size=len(trainData), shuffle=False)
testLoader = data.DataLoader(testData, batch_size=len(testData), shuffle=False)
epochs = 10000
train_model(trainLoader, testLoader, epochs)
结果展示
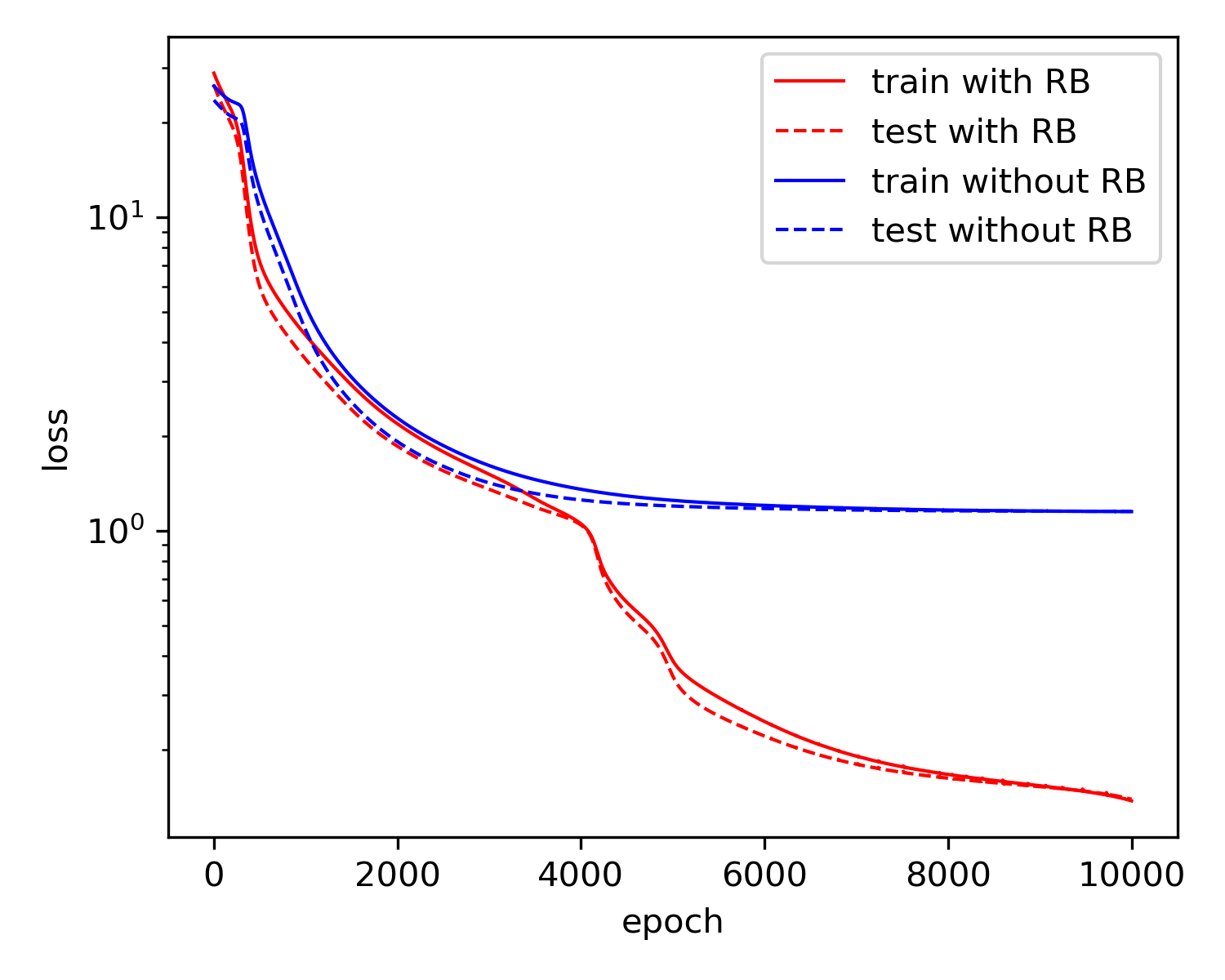
可以看到, 由于Residual Block结构引入额外的优化参数, 模型复杂度得以提升. 同时, 相较于常规Neural Network(对应去除Residual Block之\(\oplus\)), Residual Block之Neural Network在优化参数个数相同的前提下更加稳妥地扩大了函数空间.
使用建议
①. 残差函数之设计应当具备与目标输出匹配之能力;
②. 残差函数之设计可改变dimension, 此时\(\oplus\)侧之输入应当进行线性等维调整;
③. 若训练数据之复杂度高于测试数据, 则在训练起始, 训练数据之loss可能也要高于测试数据.参考文档
①. 动手学深度学习 - 李牧
最新文章
- 了解HTML图像
- Java字节、十进制、十六进制、字符串之间的相互转换
- 如何撰写PRD
- [转]阎宏博士的JAVA与模式
- [实践] ubuntu下编译安装ambari
- 一起来写2048(160行python代码)
- js面向对象的五种写法
- Vijos1051. 送给圣诞夜的极光
- rownum(转载)
- 在SSIS包中使用 Checkpoint从失败处重新启动包
- IP包头
- IDL 实现求算 DEM 坡度坡向
- switch条件语句规则
- mac 下 wget 安装
- EmptyBeanUtil
- sql语句order by排序问题
- Django框架(三)
- .net 表达式返回值和等号赋值的区别
- 算法图解 (Aditya Bhargava 著)
- 【刷题】BZOJ 2194 快速傅立叶之二