激光SLAM
2024-09-29 18:41:12
1、激光分类
维度分类:
a、二维激光(单点反射、平面、旋转台)
b、三维激光
距离分类:
a、近距离:壁障、碰撞检测、路边检测
b、远距离:行人检测、定位、建图
特点:
优点:
a、可以直接获取深度信息;
b、不受环境光照影响,比较稳定;
缺点:
a、稀疏性;
b、几何信息区分度小;
SLAM研究历史
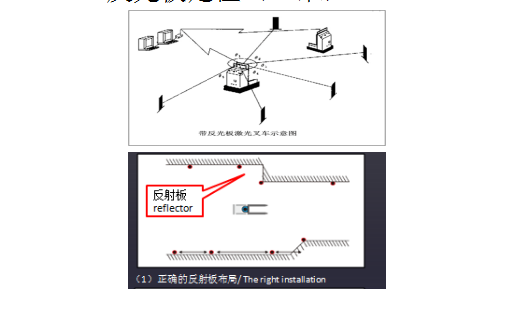
1、反光板定位(二维)
2、ekf特征定位(二维) 主要形式为角点、线。 一般要配以里程计、imu,或者运动模型来提供运动预测 算法以ekf、粒子滤波等模型形式。
http://blog.csdn.net/renshengrumenglibing/article/details/8604245
3、点或特征的ICP(二维) 里程计推导用直接的ICP替代了之前的efk过程。 定位使用粒子滤波方式。 最有代表性的是gmapping
4、技巧 1.去除信息量较少的点、例如分割去除地面、动态物体等 2.只提取一些关注信息,例如路牙 3.多种方法融合,ndt和特征、激光和相机等。 4.往二维方法上靠,二维网格、二维配准方法等。 5.隐性的借鉴十年前的有效方法 6.更强调工程型,例如行人检测等内容 7.闭环检测很多情况下不需要、不现实。(A Flexible and Scalable SLAM System with Full3D Motion Estimation)。
LOAM
最新文章
- Dynamics CRM 2015-Data Encryption激活报错
- Entity Framework 6 Recipes 2nd Edition(10-8)译 - >映射插入、修改、删除操作到存储过程
- Failed creating java D:/jre6/bin/client/jvm.dll
- 东大oj-1511: Caoshen like math
- 原!!jar包 --可执行exe文件--安装包
- UVaLive 6698 Sightseeing Bus Drivers (水题,贪心)
- iOS7自定义statusbar和navigationbar的若干问题
- ***PHP请求服务curl以及json的解析
- STM32 定时器用于外部脉冲计数
- QVariant类学习(非常强大的类型,甚至能处理QMap<QString ,QVariant>)
- oracle查询和断开用户session
- windows 下面的内存泄漏排查.
- 如何搭建DNS服务(转)
- HTML5学习系列之表单与文件
- 同一容器中a标签比较多的情况下通过title属性值隐藏
- python Cookie Session 相关用法
- man exportfs(exportfs命令中文手册)
- [luogu4556][Vani有约会]
- java-pdf转word
- JwtUtils 工具类