【Notes_3】现代图形学入门——基础变换、MVP变换模型
基础变换(二维)
三维变化与二维变换矩阵类似
齐次坐标下的基础变换
Scale:
s_x &0 &0\\
0 & s_y & 0 \\
0&0&1
\end{pmatrix}\]
Rotation:
\cos\alpha& - \sin\alpha & 0 \\
\sin\alpha & \cos \alpha &0 \\
0&0&1
\end{pmatrix}\]
Translation:
1 & 0 & t_x \\
0 &1& t_y\\
0 &0& 1
\end{pmatrix}\]
组合变换(Compositon Transform)
矩阵变换把先变化的矩阵放到右边:矩阵运算是从右向左

四元数与旋转公式
四元数
罗德里格斯旋转公式
Rodrigue's Rotation Formula: Raotation by angle \(\alpha\) around axis \(\vec{n}\)
\begin{matrix} \underbrace{
\begin{pmatrix}
0 & -n_z & n_y \\
n_z & 0 & -n_x \\
-n_y & n_x & 0
\end{pmatrix}
} \\ N\end{matrix}\]
In the formula
I :Identity matrix
最后乘积的结果是一个3*3的矩阵
MVP变换
Model Transformation
引用博客:MVP变换
对模型进行模型变换时,需要注意坐标系是在世界坐标系原点。当绕模型中心进行变换时,首先要将模型的中心点移动到世界坐标系的原点,之后在进行模型变换,之后移回到原来的位置。
矩阵描述为:$$M=M_t^{-1} M_r M_s M_t$$
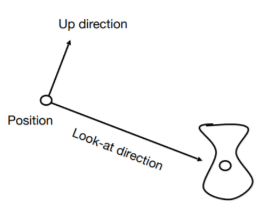
View/Camera Transformation
这个过程是将确定相机的位置:将相机的位置通过下面的过程移动到固定的点和方向。
(1) 相机的位置固定在世界坐标系的原点: \(\vec{e}\)
(2) 相机的朝向 \(-\vec{Z}\): \(\hat{g}\)
(3) 相机的向上方向\(\vec Y\): \(\hat t\)
基于上述过程,要求视图变换矩阵\(M_{view}\)分别求相机的平移矩阵\(T_{view}\)、旋转矩阵\(R_{view}\)
1 & 0 & 0 & -x_{\vec{e}} \\
0 & 1 & 0 & -y_{\vec{e}} \\
0 & 0 & 1 & -z_{\vec{e}} \\
0 & 0 & 0 & 1
\end{bmatrix}\]
求旋转矩阵时,直接求相机旋转到原点的矩阵不容易求解,但求原点到相机位置的旋转矩阵容易求。
所以先求原点到相机的旋转矩阵:Z To \(-\hat{g}\)、Y To \(\hat{t}\)、最后保证\(\vec{X}\) To \((\hat g \times \hat t)\) 朝向的方向,原因是保证符合右手坐标系。
x_{\hat{g} \times \hat{t}}&x_{t}&x_{-g}&0\\
y_{\hat{g} \times \hat{t}}&x_{t}&y_{-g}&0\\
z_{\hat{g} \times \hat{t}}&x_{t}&z_{-g}&0\\
0&0&0&1
\end{bmatrix}\]
因为\(R_{view}^{-1}\)是正交矩阵,所以逆矩阵和旋转矩阵相同。
x_{\hat{g} \times \hat{t}}&y_{\hat{g} \times \hat{t}}&z_{\hat{g} \times \hat{t}}&0\\
x_{t}&y_{t}&z_{t}&0\\
x_{-g}&y_{-g}&z_{-g}&0\\
0&0&0&1
\end{bmatrix}\]
所以
\begin{bmatrix}
x_{\hat{g} \times \hat{t}}&y_{\hat{g} \times \hat{t}}&z_{\hat{g} \times \hat{t}}&0\\
x_{t}&y_{t}&z_{t}&0\\
x_{-g}&y_{-g}&z_{-g}&0\\
0&0&0&1
\end{bmatrix}
\]
1 & 0 & 0 & -x_{\vec{e}} \\
0 & 1 & 0 & -y_{\vec{e}} \\
0 & 0 & 1 & -z_{\vec{e}} \\
0 & 0 & 0 & 1
\end{bmatrix}\]
Projection Transformation
个人理解投影变换的终极目的是让物体挤压在一个单位大小的平面(空间)内。原因先挖个坑。
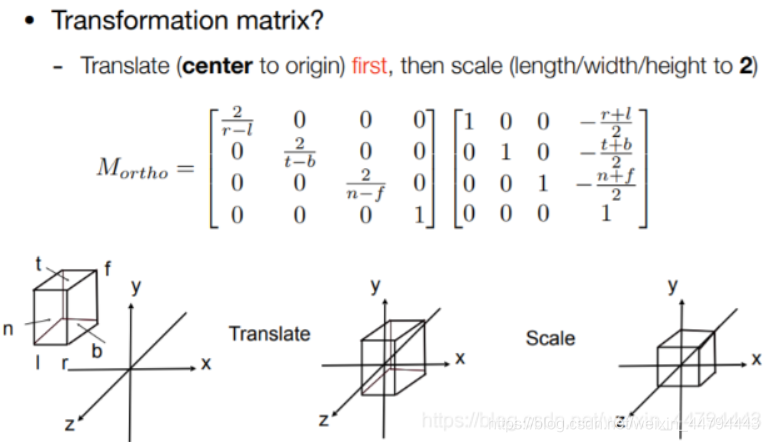
Orthographic Projection
简单理解就是将物体的忽略z坐标,将模型通过Scale To [-1,-1]^2平面内。
真正的操作:
(1) 移动模型的位置到原点
(2) 缩放模型到空间[-1,1]^3中
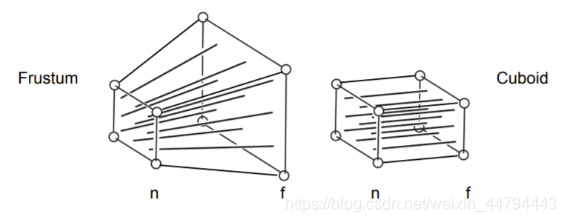
Perspective Projection
正视投影的光线可以看成是一个立方体,如上图。透视投影的光线可以看成一个视锥,如下图。
透视变换可以分为两个步骤进行:
(1) 将视锥挤压到立方体内\(M_{persp->ortho}\)
(2) 将挤压后的视锥进行正视投影变换$M_{ortho}
挤压时的变换矩阵\(M_{persp->ortho}=\begin{bmatrix}
n&0&0&0\\
0&n&0&0\\
0&0&n+f&-nf\\
0 & 0&1&0
\end{bmatrix}\)
所以投影变换矩阵
\]
最新文章
- Atitit.研发团队与公司绩效管理的原理概论的attilax总结
- ML-线性回归
- python3.4怎么连接mysql pymysql连接mysql数据库
- 如何排查java.lang.NoSuchMethodError错误
- 概率图模型之有向图与无向图之间的关系 I map D map perfect map(完美图) 概念
- Vimwiki使用笔记
- KMP与扩展KMP
- 实例甜点 Unreal Engine 4迷你教程(6)之三个重要基础操作SpawnActor、TArray的Add和Remove
- 【原创】POI 生成Excel文件并下载
- vue关闭代码检查eslint
- 软件开发者路线图梗概&书摘chapter2
- 图形设计必备软件:CorelDRAW
- 17秋 SDN课程 第五次上机作业
- upsource初探
- ecmall 开发一个新模块
- 廖雪峰Java6 IO编程-2input和output-4Filter模式
- opencv 线,椭圆 圆
- Mac系统登录不进系统解决办法
- ASP.NET MVC 向浏览器发送文件以提供文件下载功能
- MongoDB的固态list
热门文章
- dedecms织梦后台栏目显示文档数不为0,但点进去之后什么都没有
- 微信支付V3 SDK Payment Spring Boot 1.0.6 发布,实现留守红包,助力抗疫
- Elasticsearch 之 Filter 与 Query 有啥不同?
- 使用 noexcept 我们需要知道什么?
- The 2019 ICPC Asia Shanghai Regional Contest H Tree Partition k、Color Graph
- POJ - 1743 Musical Theme (后缀数组)
- hdu3555 Bomb(要49)
- C. New Year Book Reading
- python常用连接字符串
- GitHub Actions 支持 "skip ci" 了