ROS学习(七)—— 理解ROS Topic
一、准备工作
1、打开roscore
roscore
2、turtlesim
打开一个turtulesim节点
rosrun turtlesim turtlesim_node
3、turtle keyboard teleoperation
rosrun turtlesim turtle_teleop_key
现在你可以使用键盘上的方向键来控制turtle运动了。如果不能控制,请选中turtle_teleop_key所在的终端窗口以确保你的按键输入能够被捕获。

二、ROS Topic
turtlesim_node节点和turtle_teleop_key节点之间是通过一个ROS话题来互相通信的。turtle_teleop_key在一个话题上发布按键输入消息,而turtlesim则订阅该话题以接收该消息。下面让我们使用rqt_graph来显示当前运行的节点和话题。
1、Using rqt_graph
rqt_graph能够创建一个显示当前系统运行情况的动态图形
(1)安装:
sudo apt-get install ros-kinetic-rqt
(2)使用:
rosrun rqt_graph rqt_graph
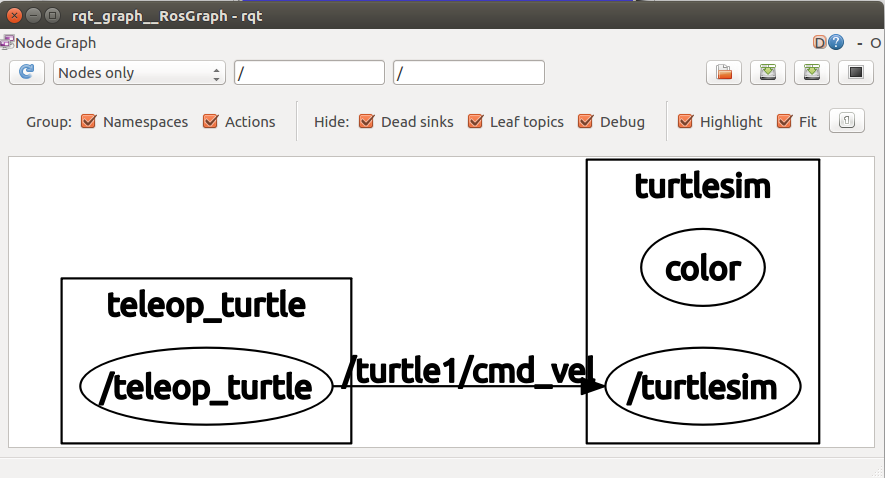
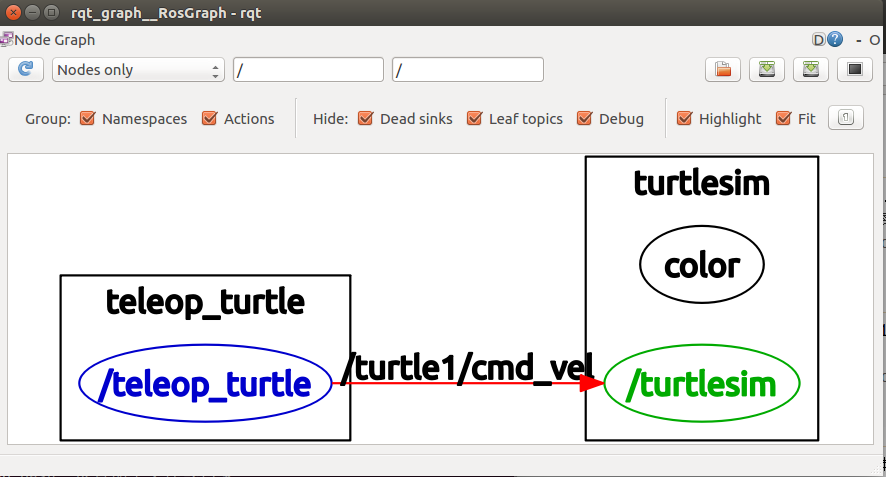
如果你将鼠标放在适当位置,相应的ROS节点(蓝色和绿色)和话题(红色)就会高亮显示。正如你所看到的,turtlesim_node和turtle_teleop_key节点正通过一个名为 /turtle1/cmd_vel的话题来互相通信。
2、介绍rostopic
rostopic命令工具能让你获取有关ROS话题的信息。
rostopic bw display bandwidth used by topic
rostopic echo print messages to screen
rostopic hz display publishing rate of topic
rostopic list print information about active topics
rostopic pub publish data to topic
rostopic type print topic type
3、使用rostopic echo
(1)语法:
rostopic echo [topic]
(2)作用:
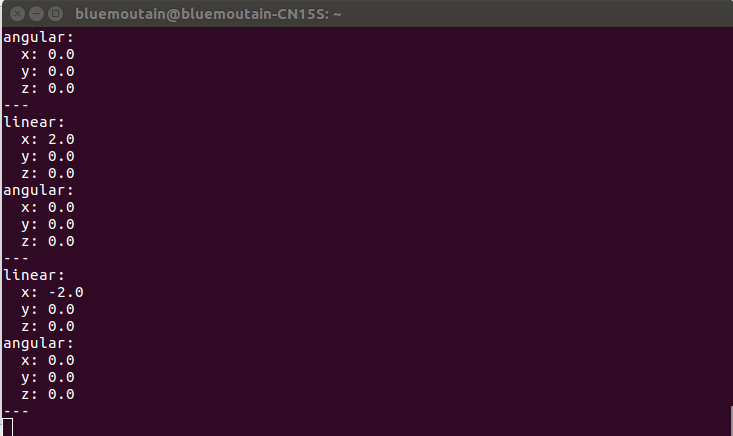
Rostopic echo可以显示在某个话题上发布的数据。
(3)demo
rostopic echo /turtle1/cmd_vel
4、使用rostopic list
(1)作用:
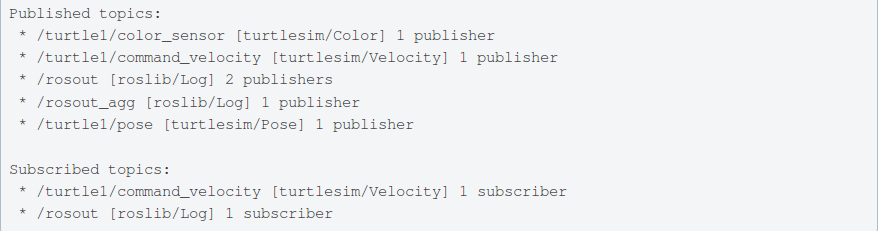
Rostopic list能够列出所有当前订阅和发布的话题。
(2)语法:
Usage: rostopic list [/topic] Options:
-h, --help show this help message and exit
-b BAGFILE, --bag=BAGFILE
list topics in .bag file
-v, --verbose list full details about each topic
-p list only publishers
-s list only subscribers
(3)demo
rostopic list -v
三、ROS Messages
话题之间的通信是通过在节点之间发送ROS消息实现的。对于发布器(turtle_teleop_key)和订阅器(turtulesim_node)之间的通信,发布器和订阅器之间必须发送和接收相同类型的消息。这意味着话题的类型是由发布在它上面的消息类型决定的。使用rostopic type命令可以查看发布在某个话题上的消息类型。
1、使用rostopic type
(1)作用:
可以返回所发布话题的消息类型
(2)语法:
rostopic type [topic]
(3)demo
rostopic type /turtle1/cmd_vel
返回 geometry_msgs/Twist 我们可以看看这个消息类型的具体信息(使用rosmsg)
rosmsg show geometry_msgs/Twist
四、使用rostopic发送消息
1、rostopic pub
(1)语法:
rostopic pub [topic] [msg_type] [args]
(2)作用:
可以把数据发布到当前某个正在广播的话题上。
(3)demo
| 命令成分 | 作用 |
| rostopic pub | 发布消息到话题的指令 |
| -1 | 只发送一次 |
| -r | 表示重复发送命令 |
| /turtle1/cmd_vel | 发送给哪个话题 |
| geometry_msgs/Twist | 发送消息类型 |
| -- | 表示后面出现的 ' - ' 不表示命令 |
| '[2,0,0]' '[0,0,1.8]' | 发送消息内容,格式可以查询http://wiki.ros.org/ROS/YAMLCommandLine |
发送一次命令:
rostopic pub - /turtle1/cmd_vel geometry_msgs/Twist -- '[2,0,0]' '[0,0,1.8]'
重复发送命令
rostopic pub /turtle1/cmd_vel geometry_msgs/Twist -r -- '[2.0, 0.0, 0.0]' '[0.0, 0.0, -1.8]'
2、rostopic hz
(1)作用:
查询消息发布的频率
(2)语法:
rostopic hz [topic]
(3)demo:
rostopic hz /turtle1/pose

(4)我们也可以结合rostopic type和rosmsg show命令来获取关于某个话题的更深层次的信息
rostopic type /turtle1/cmd_vel | rosmsg show
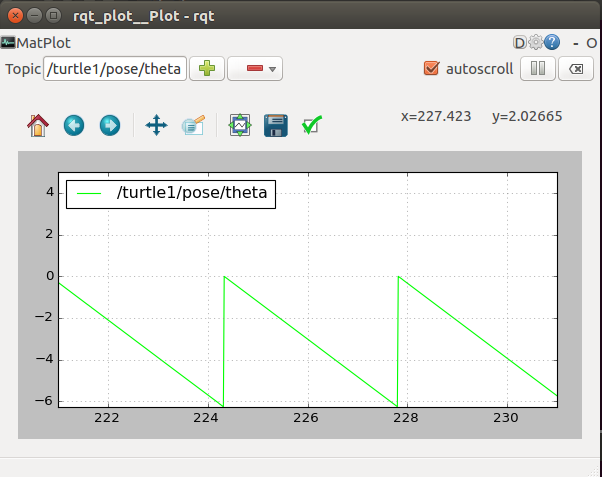
5、rqt_plot
(1)作用:
rqt_plot命令可以实时显示一个发布到某个话题上的数据变化图形
(2)用法:
rosrun rqt_plot rqt_plot
然后可以跳出的小程序中加入话题数据即可。
最新文章
- Devexpress EXCEL导出
- 打完补丁后测试db_link对SCN的影响
- [php-src]一个Php扩展的结构
- BZOJ3832 : [Poi2014]Rally
- Resilio(BtSync)搭建
- [转] JAVA网站高并发解决方案
- poj - 1258 Agri-Net (最小生成树)
- How to Fix Missing TortoiseSVN File Status Icons in Windows
- jmeter压测app
- Powershell 设置数值格式 1
- 0-1背包的动态规划算法,部分背包的贪心算法和DP算法------算法导论
- j2se--Socket沟通
- POPTEST老李分享修改dns ip的vbs代码
- C#设计模式之六原型模式(Prototype)【创建型】
- 初窥c++11:lambda函数及其用法
- Migrating Brokers in a Cluster
- 国家码和reginCode映射关系
- 第四百一十二节,python接口,抽象方法抽象类
- eclipse 设置Java快捷键补全
- LB+nginx+tomcat7集群模式下的https请求重定向(redirect)后变成http的解决方案
热门文章
- GIT 如何合并另一个远程Git仓库的文件到本地仓库里某个指定子文件夹并不丢失远程提交记录?
- border-color: transparent rgb(255, 48, 48) transparent transparent;
- (算法)Game
- git Alias 设置
- 在Android Studio中打开Android Device Monitor时报错的解决方法
- android中使用SharedPreferences存储数据
- Initialization failed for Block pool <registering> (Datanode Uuid unassigned) service to IP1:8020 Invalid volume failure config value: 1
- vsphere性能
- sql按分时段统计
- VS2012 No exports were found that match the constraint