迁移学习(IIMT)——《Improve Unsupervised Domain Adaptation with Mixup Training》
论文信息
论文标题:Improve Unsupervised Domain Adaptation with Mixup Training
论文作者:Shen Yan, Huan Song, Nanxiang Li, Lincan Zou, Liu Ren
论文来源:arxiv 2020
论文地址:download
论文代码:download
引用次数:93
1 Introduction
现有方法分别对源域和目标域施加约束,忽略了它们之间的重要相互作用。本文使用 mixup 来加强训练约束来直接解决目标域的泛化性能。
当前工作假设:当在表示级处理域差异时,训练后的源分类器能够在目标域上自动取得良好的性能。然而,当前研究表明,在两个域上都表现良好的分类器可能不存在 [6,7],所以仅依赖源分类器可能导致目标域的显著错误分类。现有最先进的方法在对抗学习过程中寻求额外的训练约束,不过他们都是在所选择的域独立地使用训练约束,而不是联合约束。这使得这两个域之间的重要相互作用尚未被探索,并可能会显著限制训练约束的潜力。
本文通过简单的 $\text{mixup training}$,证明了引入该训练约束可以显著提高模型适应性能。
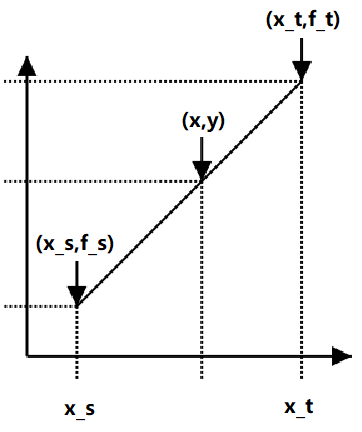
$\text{Mixup}$:给定一对样本 $\left(x_{i}, y_{i}\right)$、$\left(x_{j}, y_{j}\right)$ ,生成的增强表示为:
$\begin{array}{c}x^{\prime}=\lambda x_{i}+(1-\lambda) x_{j} \\y^{\prime}=\lambda y_{i}+(1-\lambda) y_{j}\end{array} $
其中,$\lambda \in[0,1]$。
通过使用 $\left(x^{\prime}, y^{\prime}\right)$ 训练,鼓励了模型的线性行为,其中原始数据中的线性插值导致预测的线性插值。
2 Problem Statement
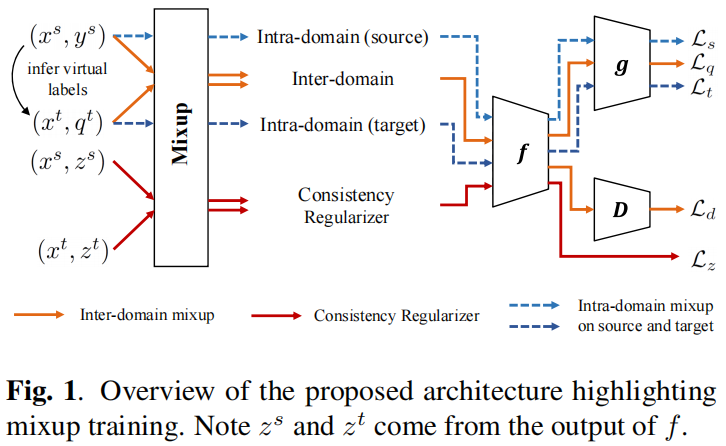
The overview of IIMT framework is shown in $\text{Figure 1}$. We denote the labeled source domain as set $\left\{\left(x_{i}^{s}, y_{i}^{s}\right)\right\}_{i=1}^{m_{s}} \sim \mathcal{S}$ and unlabeled target domain as set $\left\{x_{i}^{t}\right\}_{i=1}^{m_{t}} \sim \mathcal{T}$ . Here $y_{i}$ denotes one-hot labels. The overall classification model is denoted as $h_{\theta}: \mathcal{S} \mapsto \mathcal{C}$ with the parameterization by $\theta$ . Following prominent approaches in UDA [6, 7], we consider the classification model as the composite of an embedding encoder $f_{\theta}$ and an embedding classifier $g_{\theta}: h=f \circ g$ . Note that encoder is shared by the two domains. The core component in our framework is mixup, imposed both across domains (Inter-domain in $\text{Figure 1}$) and within each domain (Intra-domain (source) and Intradomain (target) in $\text{Figure 1}$. All mixup training losses and the domain adversarial loss are trained end-to-end.
3 Method
3.1 Inter-domain Mixup Training
本文框架中的关键组件:源域和目标域之间的 $\text{mixup}$ 训练。在 $h$ 的训练中,$\text{mixup}$ 提供了插值标签来强制分类器跨域的线性预测行为。与单独使用源标签训练相比,它们导致了一种简单的归纳偏差,但本文可以直接提高分类器对目标域的泛化能力。
$\text{mixup}$ 训练需要样本标签来进行插值,本文利用推断出的标签作为对目标域的弱监督。类似的想法在半监督学习设置[10,9]中被证明在开发相关的未标记数据方面是非常有效的。
首先,对目标域每个数据样本执行 $K$ 个任务相关的随机增强,以获得转换后的样本 $\left\{\hat{x}_{i, k}\right\}_{k=1}^{K}$。然后,计算目标域的虚拟标签:$\bar{q}_{i}=\frac{1}{K} \sum\limits _{k=1}^{K} h_{\theta}\left(\hat{x}_{i, k}\right)$,归一化为 $q_{i}=\bar{q}_{i}^{\frac{1}{T}} / \sum\limits _{c} \bar{q}_{i, c}^{\frac{1}{T}}$,使用较小的 $T<1$ 产生更清晰的预测分布。

$\begin{array}{l}x_{i}^{s t}=\lambda^{\prime} x_{i}^{s}+\left(1-\lambda^{\prime}\right) x_{i}^{t} \quad\quad(1) \\q_{i}^{s t}=\lambda^{\prime} y_{i}^{s}+\left(1-\lambda^{\prime}\right) q_{i}^{t} \quad\quad(2) \\\mathcal{L}_{q}=\frac{1}{B} \sum_{i} H\left(q_{i}^{s t}, h_{\theta}\left(x_{i}^{s t}\right)\right)\quad\quad(3) \end{array}$
其中,$\text{B}$ 代表 $\text{batch size}$ ,$\text{H}$ 为交叉熵损失,$\text{mixup}$ 加权参数根据:$\lambda \sim \operatorname{Beta}(\alpha, \alpha)$ 和 $\lambda^{\prime}=\max (\lambda, 1-\lambda)$ 选择。
当设置 $\alpha$ 接近于 $1$ 时,从范围 $[0,1]$ 中选择 $\lambda$ 为中间值的概率更大,使得两个域之间的插值水平更高。请注意,$\lambda^{\prime}$ 始终超过 $0.5$,以确保源域占主导地位。同样地,也可产生目标域主导的 $\text{mixup}$,只需要通过在 $\text{Eq.1}$ 中切换 $x^{s}$ 和 $x^{t}$ 的系数,对应地形成 $\left(x^{t s}, q^{t s}\right)$。使用目标域主导的 $\left(x^{t s}, q^{t s}\right)$,采用均方误差(MSE)损失,因为它更能容忍目标域中的虚假虚拟标签。
3.1.1 Consistency Regularizer
在域差异非常大的情况下,域间 $\text{mixup}$ 所施加的线性约束可能效果较差。具体来说,当异构的原始输入在 $\text{Eq.1}$ 中被插值时,迫使模型 $h$ 产生相应的插值预测变得更加困难。同时,对于特征级域混淆的域对抗损失的联合训练会增加训练难度。
因此,本文为潜在特征设计一个一致性正则化器,以更好地促进域间 $\text{mixup}$ 训练:
$\begin{aligned}z_{i}^{s t} & =\lambda^{\prime} f_{\theta}\left(x_{i}^{s}\right)+\left(1-\lambda^{\prime}\right) f_{\theta}\left(x_{i}^{t}\right) \quad\quad(4) \\\mathcal{L}_{z} & =\frac{1}{B} \sum\limits _{i}\left\|z_{i}^{s t}-f_{\theta}\left(x_{i}^{s t}\right)\right\|_{2}^{2}\quad\quad(5)\end{aligned}$
即:通过两个向量之间的 $\text{MSE}$ 损失,使混合特征更接近于混合输入的特征。这个正则化器的作用:当 $\text{Eq.5}$ 强制 $z_{i}^{s t}$, $f_{\theta}\left(x_{i}^{s t}\right)$ 通过浅分类器 $g$,模型预测的线性更容易满足。
3.1.2 Domain Adversarial Training
最后一个组成部分是使用标准的域对抗性训练来减少域的差异。本文的实现限制在更基本的 DANN 框架[1]上,以试图集中于评估混合线性约束。在DANN中,一个域鉴别器和共享嵌入编码器(生成器)在对抗性目标下进行训练,使编码器学习生成域不变特征。混合源和目标样本的域对抗性损失:
3.2 Intra-domain Mixup Training
给定源标签和目标虚拟标签,$\text{mixup}$ 训练也可以在每个域内执行。由于在同一域内的样本遵循相似的分布,因此不需要应用特征级的线性关系。因此,只对这两个领域使用标签级 $\text{mixup}$ 训练,并定义它们相应的损失:
$\begin{array}{l}x_{i}^{s^{\prime}}=\lambda^{\prime} x_{i}^{s}+\left(1-\lambda^{\prime}\right) x_{j}^{s} \\y_{i}^{s^{\prime}}=\lambda^{\prime} y_{i}^{s}+\left(1-\lambda^{\prime}\right) y_{j}^{s} \\\mathcal{L}_{s}=\frac{1}{B} \sum\limits _{i} H\left(y_{i}^{s^{\prime}}, h_{\theta}\left(x_{i}^{s^{\prime}}\right)\right)\end{array}\quad\quad(7)$
$\begin{array}{l}x_{i}^{t^{\prime}}=\lambda^{\prime} x_{i}^{t}+\left(1-\lambda^{\prime}\right) x_{j}^{t} \\q_{i}^{t^{\prime}}=\lambda^{\prime} q_{i}^{t}+\left(1-\lambda^{\prime}\right) q_{j}^{t} \\\mathcal{L}_{t}=\frac{1}{B} \sum\limits _{i}\left\|q_{i}^{t^{\prime}}-h_{\theta}\left(x_{i}^{t^{\prime}}\right)\right\|_{2}^{2}\end{array}\quad\quad(8)$
虽然域内混合作为一种数据增强策略是直观的,但它对 UDA 特别有用。正如在[6]中所讨论的,没有局部约束的条件熵的最小化会导致数据样本附近的预测突变。在[6]中,利用虚拟对抗训练[10]来增强邻域的预测平滑性。不同的是,我们发现域内混合训练能够实现相同的目标。
3.3 Training Objective
训练目标:
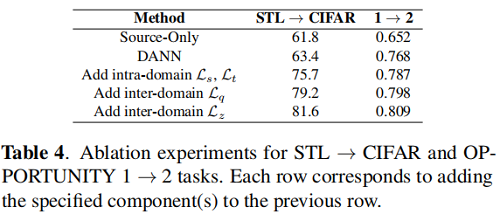
$\mathcal{L}=w_{q} \mathcal{L}_{q}+w_{d} \mathcal{L}_{d}+w_{z} \mathcal{L}_{z}+w_{s} \mathcal{L}_{s}+w_{t} \mathcal{L}_{t}\quad\quad(9)$
由于 $\mathcal{L}_{t}$ 只涉及虚拟标签,因此很容易受到目标域的不确定性的影响。本文为训练中的 $w_{t}$ 设置了一个线性时间表,从 $0$ 到一个预定义的最大值。从初始实验中,观察到该算法对其他加权参数具有良好的鲁棒性。因此,只搜索 $w_{t}$,而简单地将所有其他权重固定为 $1$。
4 Experiment
For image classification experiments, we evaluate on MNIST, MNIST-M, Street View House Numbers (SVHN), Synthetic Digits (SYN DIGITS), CIFAR-10 and STL-10.
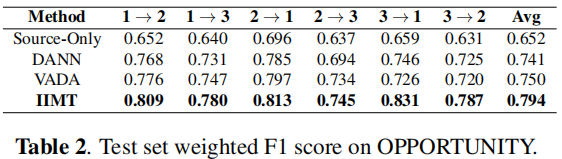
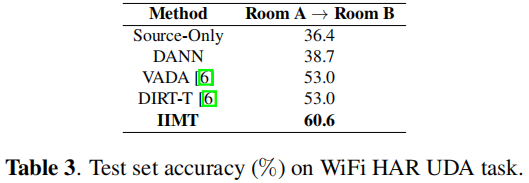
For HAR experiments, we evaluate on OPPORTUNITY and WiFi datasets.
A → B to denote the domain adaptation task with source domain A and target domain B.
For digits classification UDA tasks
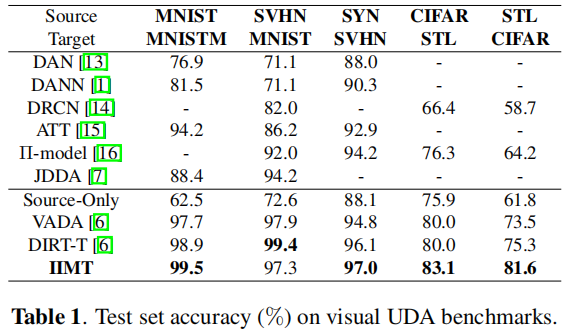
For object recognition UDA tasks
Note
条件熵:条件熵 $H(Y|X)$ 表示在已知随机变量 $X$ 的条件下随机变量 $Y$ 的不确定性。
$\begin{aligned}H(Y \mid X) & =\sum\limits_{x \in X} p(x) H(Y \mid X=x) \\& =-\sum\limits_{x \in X} p(x) \sum\limits_{y \in Y} p(y \mid x) \log p(y \mid x) \\& =-\sum\limits_{x \in X} \sum\limits_{y \in Y} p(x, y) \log p(y \mid x)\end{aligned}$
import torch
from torch.autograd import Function
import torch.nn as nn
import torch.nn.functional as F class ReverseLayerF(Function):
@staticmethod
def forward(ctx, x, alpha):
print("forward===========================")
print("xx = ",x)
ctx.alpha = alpha
ctx.feature = x
return x.view_as(x) @staticmethod
def backward(ctx, grad_output):
print("backward===========================")
print("grad_output = ",grad_output)
output = grad_output.neg() * ctx.alpha
return output, None class Net(nn.Module):
def __init__(self):
super(Net, self).__init__()
self.featurizer = nn.Linear(4,3) self.classifier = nn.Linear(3,2)
self.discriminator = nn.Linear(3,2)
self.alpha = 1 def forward(self,x,disc_labels,label):
# 特征提取
z = self.featurizer(x)
print("z = ",z) disc_input = z
disc_input = ReverseLayerF.apply(disc_input, self.alpha)
disc_out = self.discriminator(disc_input)
disc_loss = F.cross_entropy(disc_out, disc_labels) all_preds = self.classifier(z)
classifier_loss = F.cross_entropy(all_preds,label)
loss = classifier_loss + disc_loss
loss.backward()
return x = torch.tensor([[ 1.1118, 1.8797, -0.9592, -0.6786],
[ 0.4843, 0.4395, -0.2360, -0.6523],
[ 0.7377, 1.4712, -2.3062, -0.9620],
[-0.7800, 1.8482, 0.0786, 0.0179]], requires_grad=True)
disc_labels = torch.LongTensor([0,0,1,1])
label = torch.LongTensor([0,0,1,1]) print("x = ",x)
print("disc_labels = ",disc_labels)
print("label = ",label)
print("+++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++")
model = Net()
model(x,disc_labels,label)
# Loss function
adversarial_loss = torch.nn.BCELoss() # Initialize generator and discriminator
generator = Generator()
discriminator = Discriminator() # Optimizers
optimizer_G = torch.optim.Adam(generator.parameters(), lr=opt.lr, betas=(opt.b1, opt.b2))
optimizer_D = torch.optim.Adam(discriminator.parameters(), lr=opt.lr, betas=(opt.b1, opt.b2)) for epoch in range(opt.n_epochs):
for i, (imgs, _) in enumerate(dataloader): # Adversarial ground truths
valid = Variable(Tensor(imgs.size(0), 1).fill_(1.0), requires_grad=False) #torch.Size([64, 1])
fake = Variable(Tensor(imgs.size(0), 1).fill_(0.0), requires_grad=False) #torch.Size([64, 1]) # Configure input
real_imgs = Variable(imgs.type(Tensor)) #torch.Size([64, 1, 28, 28]) # Train Generator ======================== optimizer_G.zero_grad() # Sample noise as generator input
z = Variable(Tensor(np.random.normal(0, 1, (imgs.shape[0], opt.latent_dim)))) #torch.Size([64, 100]) # Generate a batch of images
gen_imgs = generator(z) #torch.Size([64, 1, 28, 28]) # Loss measures generator's ability to fool the discriminator
g_loss = adversarial_loss(discriminator(gen_imgs), valid) g_loss.backward()
optimizer_G.step() #Train Discriminator ========================
optimizer_D.zero_grad() # Measure discriminator's ability to classify real from generated samples
real_loss = adversarial_loss(discriminator(real_imgs), valid)
fake_loss = adversarial_loss(discriminator(gen_imgs.detach()), fake)
d_loss = (real_loss + fake_loss) / 2 d_loss.backward()
optimizer_D.step()
最新文章
- The Engine Document of JustWeEngine
- Netsuite订单审核问题
- jenkins+git+maven搭建自动化部署项目环境
- WCF基础教程之开篇:创建、测试和调用WCF
- 如何从oc中去获取一个私有的变量.....
- eclipse 自动补全
- PAT Ranking (排名)
- Storm系列(二十)分区事务PartitionTransaction及示例
- C#基础入门--关于C#背景介绍以及变量相关
- ArrayList 和 LinkedList 源码分析
- vscode 正则表达式替换
- 如何在首次启动 Linux 虚拟机时对其进行自定义
- c# 网站生成静态页面
- ICCS 会议 Latex 压缩文件提交主要事项
- C#面向对象二
- vue学习(转载)
- Android简单的编写一个txt阅读器(没有处理字符编码),适用于新手学习
- nodejs+react构建仿知乎的小Demo
- hdu 3081(二分+并查集+最大流||二分图匹配)
- 【uva 10294】 Arif in Dhaka (First Love Part 2) (置换,burnside引理|polya定理)