teb教程7
2024-08-31 23:37:49
融合自定义的障碍物
简介:本部分讲解怎样考虑其他节点发布的多边形的障碍物。
1.在一些应用当中,可能不想依赖于代价地图或者想添加其他的除了点状的障碍物。你可以发送你自己的障碍物列表到teb_local_planner包里面,通过指定话题/obstacles.
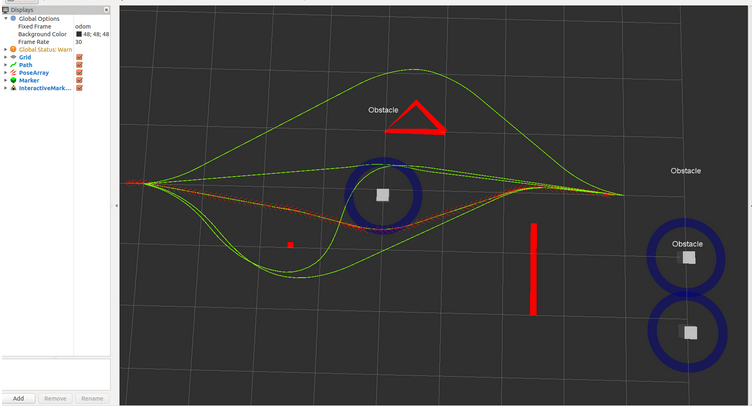
下面的消息类型costmap_converter/ObstacleArrayMsg是costmap_converter包的一部分。说明了以下障碍物的类型:
点状障碍物:提供了单个顶点的几何形状;
圆圈障碍物:提供了单个顶点且非零半径的几何形状;
线障碍物:提供了两个顶点的几何形状;
多边形障碍物:提供了不只2个顶点的多边形;
2.写一个简单的障碍物发不器
创建一个简单的python节点类发不一些障碍物;对于规划部分,会运行test_optim_node节点。如下publish_obstacles.py
#!/usr/bin/env python
import rospy, math
from costmap_converter.msg import ObstacleArrayMsg, ObstacleMsg
from geometry_msgs.msg import PolygonStamped, Point32 def publish_obstacle_msg():
rospy.init_node("test_obstacle_msg") pub = rospy.Publisher('/test_optim_node/obstacles', ObstacleArrayMsg, queue_size=) obstacle_msg = ObstacleArrayMsg()
obstacle_msg.header.stamp = rospy.Time.now()
obstacle_msg.header.frame_id = "odom" # CHANGE HERE: odom/map # Add point obstacle
obstacle_msg.obstacles.append(ObstacleMsg())
obstacle_msg.obstacles[].id =
obstacle_msg.obstacles[].polygon.points = [Point32()]
obstacle_msg.obstacles[].polygon.points[].x = 1.5
obstacle_msg.obstacles[].polygon.points[].y =
obstacle_msg.obstacles[].polygon.points[].z = # Add line obstacle
obstacle_msg.obstacles.append(ObstacleMsg())
obstacle_msg.obstacles[].id =
line_start = Point32()
line_start.x = -2.5
line_start.y = 0.5
line_end = Point32()
line_end.x = -2.5
line_end.y =
obstacle_msg.obstacles[].polygon.points = [line_start, line_end] # Add polygon obstacle
obstacle_msg.obstacles.append(ObstacleMsg())
obstacle_msg.obstacles[].id =
v1 = Point32()
v1.x = -
v1.y = -
v2 = Point32()
v2.x = -0.5
v2.y = -1.5
v3 = Point32()
v3.x =
v3.y = -
obstacle_msg.obstacles[].polygon.points = [v1, v2, v3] r = rospy.Rate() # 10hz
t = 0.0
while not rospy.is_shutdown(): # Vary y component of the point obstacle
obstacle_msg.obstacles[].polygon.points[].y = *math.sin(t)
t = t + 0.1 pub.publish(obstacle_msg) r.sleep() if __name__ == '__main__':
try:
publish_obstacle_msg()
except rospy.ROSInterruptException:
pass
如何运行:
roslaunch teb_local_planner test_optim_node.launch
roslaunch mypublisher publish_obstacles.py
相关参数:
在规划中,与自定义障碍物相关的参数
~<name>/min_obstacle_dist: Desired minimal distance from obstacles ~<name>/include_costmap_obstacles: Deactivate costmap obstacles completely ~<name>/costmap_obstacles_behind_robot_dist: Maximum distance behind the robot searched for occupied costmap cells. ~<name>/obstacle_poses_affected: Specify how many trajectory configurations/poses should be taken into account next to the closest one. ~<name>/weight_obstacle: Optimization weight for keeping a distance to obstacles. ~<name>/footprint_model: The robot footprint model
最新文章
- zookeeper原理解析-客户端与服务器端交互
- 借助fastjson 实体对象转map
- sed文本处理知识点整理
- HDU 4278 Faulty Odometer 8进制转10进制
- 【转载】为什么不建议<=3G的情况下使用CMS GC
- iOS开发 masonry 设置tableHeadView
- 充分发挥 JavaScript 语言的优势
- [Errno 11004] getaddrinfo failed
- JFinal 的源代码超具体的分析DB+ActiveRecord
- js返回格式化的日期(年-月-日)
- call, apply,bind 方法解析
- 用VSCode开发一个基于asp.net core 2.0/sql server linux(docker)/ng5/bs4的项目(3)
- 四边形不等式优化DP
- H5与APP混合开发相关知识点总结
- PHP json_decode为什么将json字符串转成数组是对象格式?
- python的pymysql使用方法【转】
- ndarray对象的使用方法
- windows远程桌面连接时,显示发生身份验证错误,给函数提供的身份无效
- RHEL7 DNS 服务 unbound 测试
- poj3073