ROS-导航功能-RVIZ
前言:slam使用激光雷达完成了地图构建,现在介绍一下自主导航。move_base用于实现最优路径规划,amcl用于实现机器人定位。
前提:已下载并编译了相关功能包集,如还未下载,可通过git下载:https://github.com/huchunxu/ros_exploring.git
一、安装导航包
sudo apt-get install ros-kinetic-navigation
二、启动模型文件
cd ~/catkin_ws/src/robot_mrobot/mrobot_bringup/launch roslaunch fake_mrobot_with_laser.launch
----------------------------
如果出现如下错误:
ERROR: cannot launch node of type [arbotix_python/arbotix_driver]: arbotix_python
ROS path [0]=/opt/ros/kinetic/share/ros
ROS path [1]=/home/cdq/catkin_ws/src
ROS path [2]=/opt/ros/kinetic/share
则是因为没有安装 arbotix 这个相关的软件包集,解决方式:
sudo apt-get install ros-kinetic-arbotix*
三、启动导航文件
cd ~/catkin_ws/src/robot_mrobot/mrobot_navigation/launch roslaunch fake_nav_demo.launch
-----------------------------
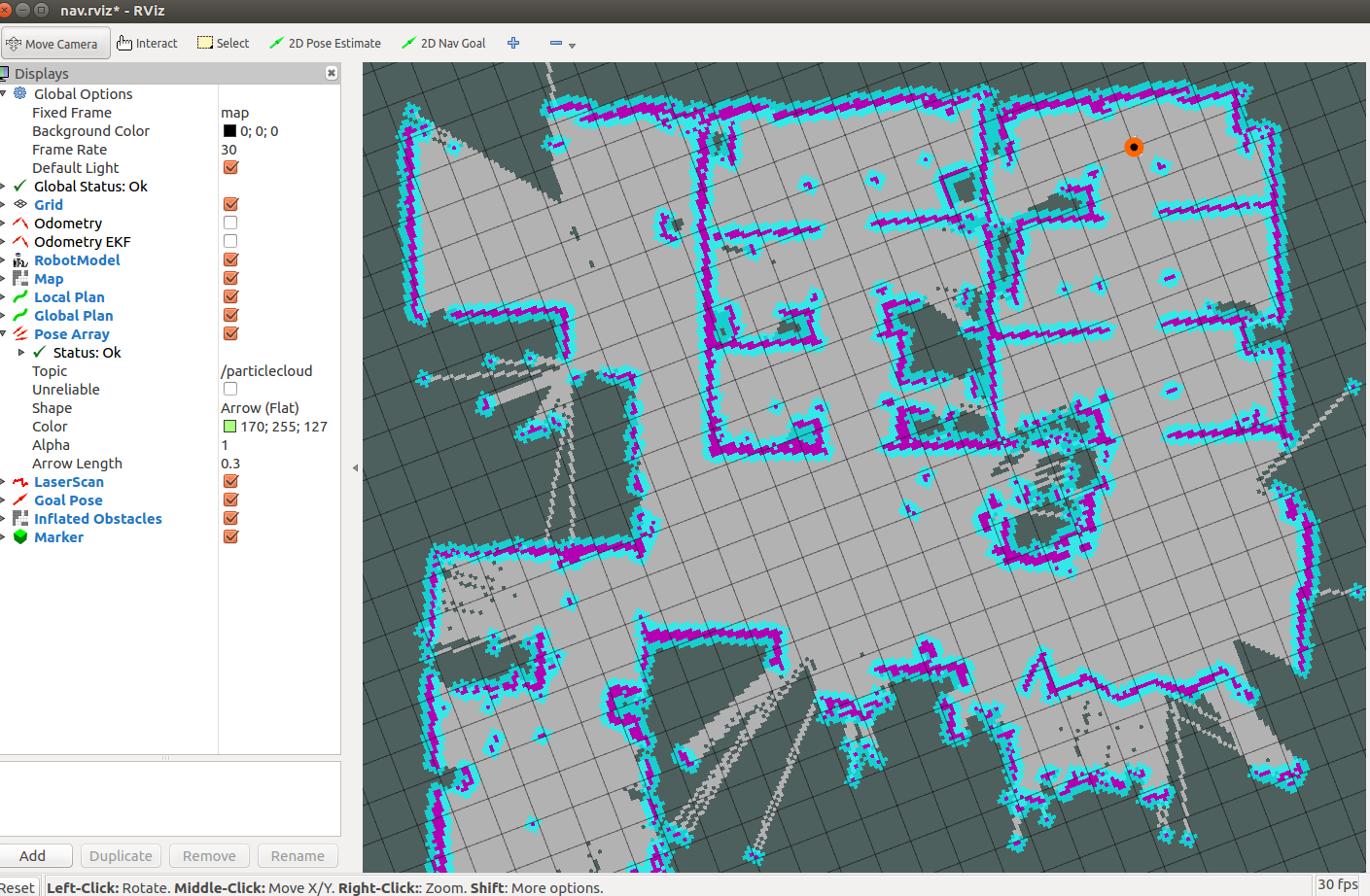
显示如下:
四、手动导航
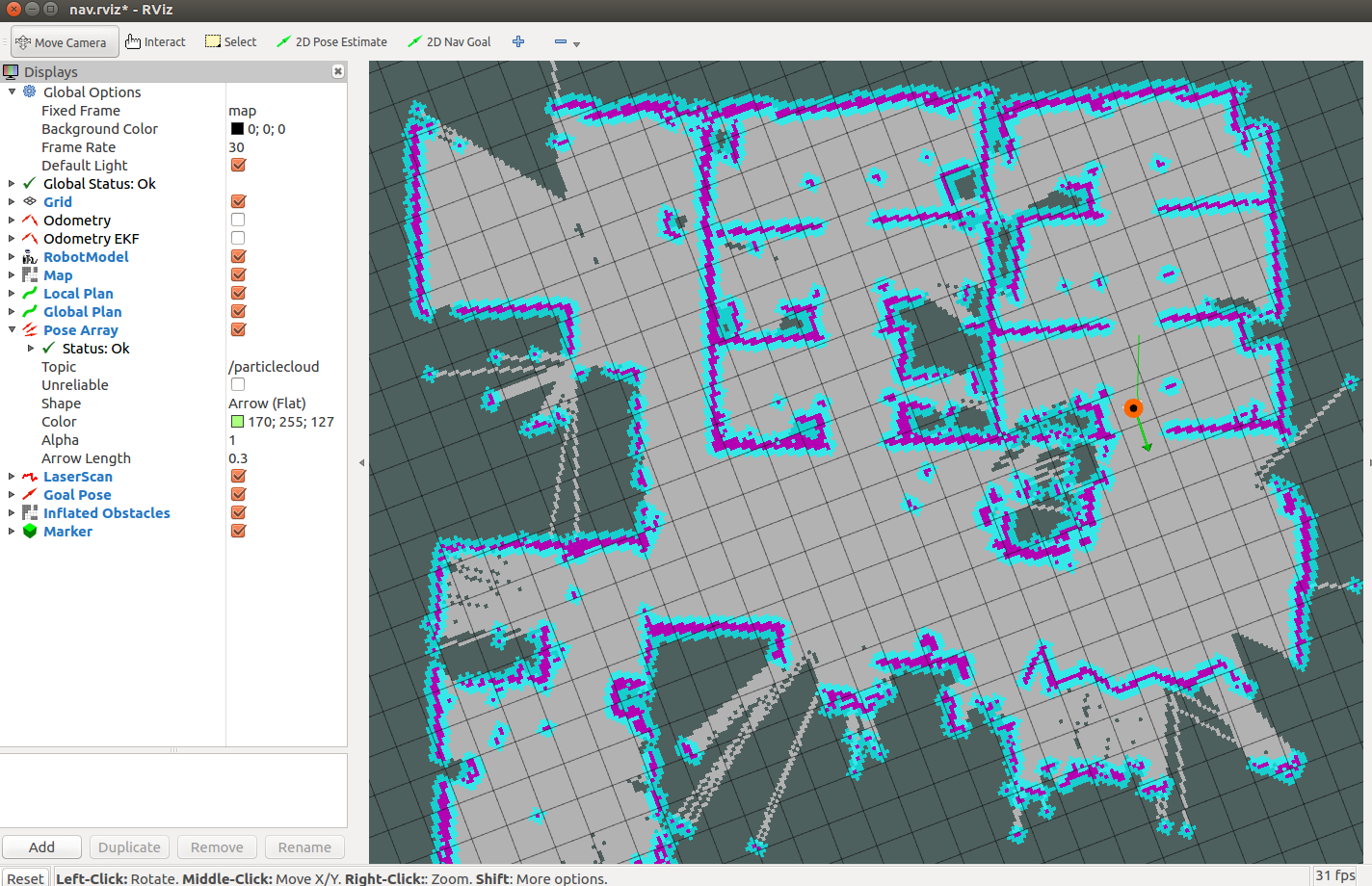
在rviz界面点击“2D Nav Goal”按钮,这个按钮用于设置导航的目标点;
鼠标左键点击目标点不要松开,选择方向后再松开;
然后机器人就会自动规划路径并导航了。
五、自动导航
启动自动导航
rosrun mrobot_navigation random_navigation.py
-------------------------------
如果出现报错:
[rosrun] Couldn't find executable named random_navigation.py below /home/cdq/catkin_ws/src/robot_mrobot/mrobot_navigation
这是因为没有权限,解决方式:
cd /home/cdq/catkin_ws/src/robot_mrobot/mrobot_navigation/scripts chmod +x random_navigation.py
然后再运行命令就可以了。
-----------------------------
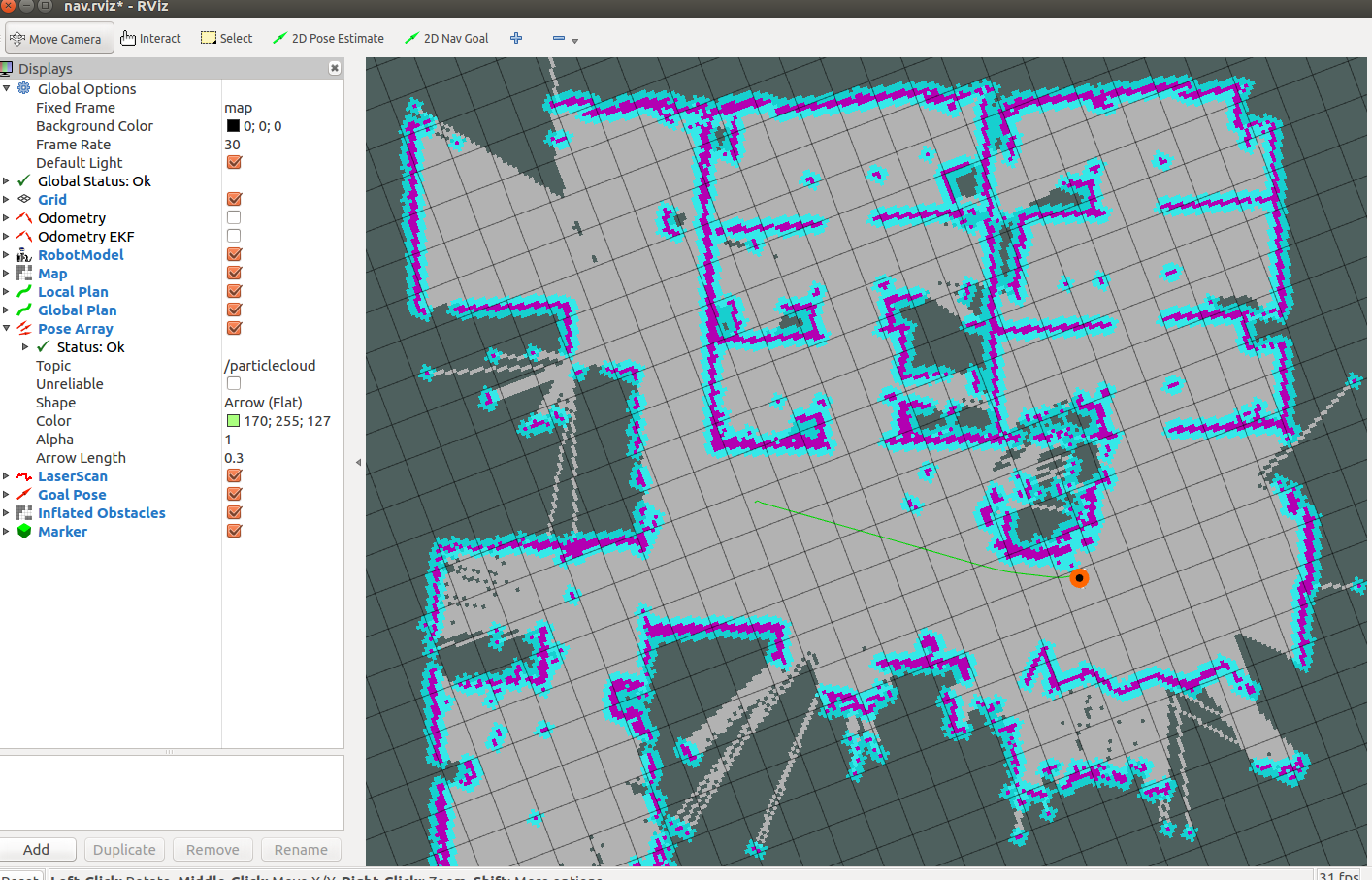
随机导航效果如下:
六、查看信息
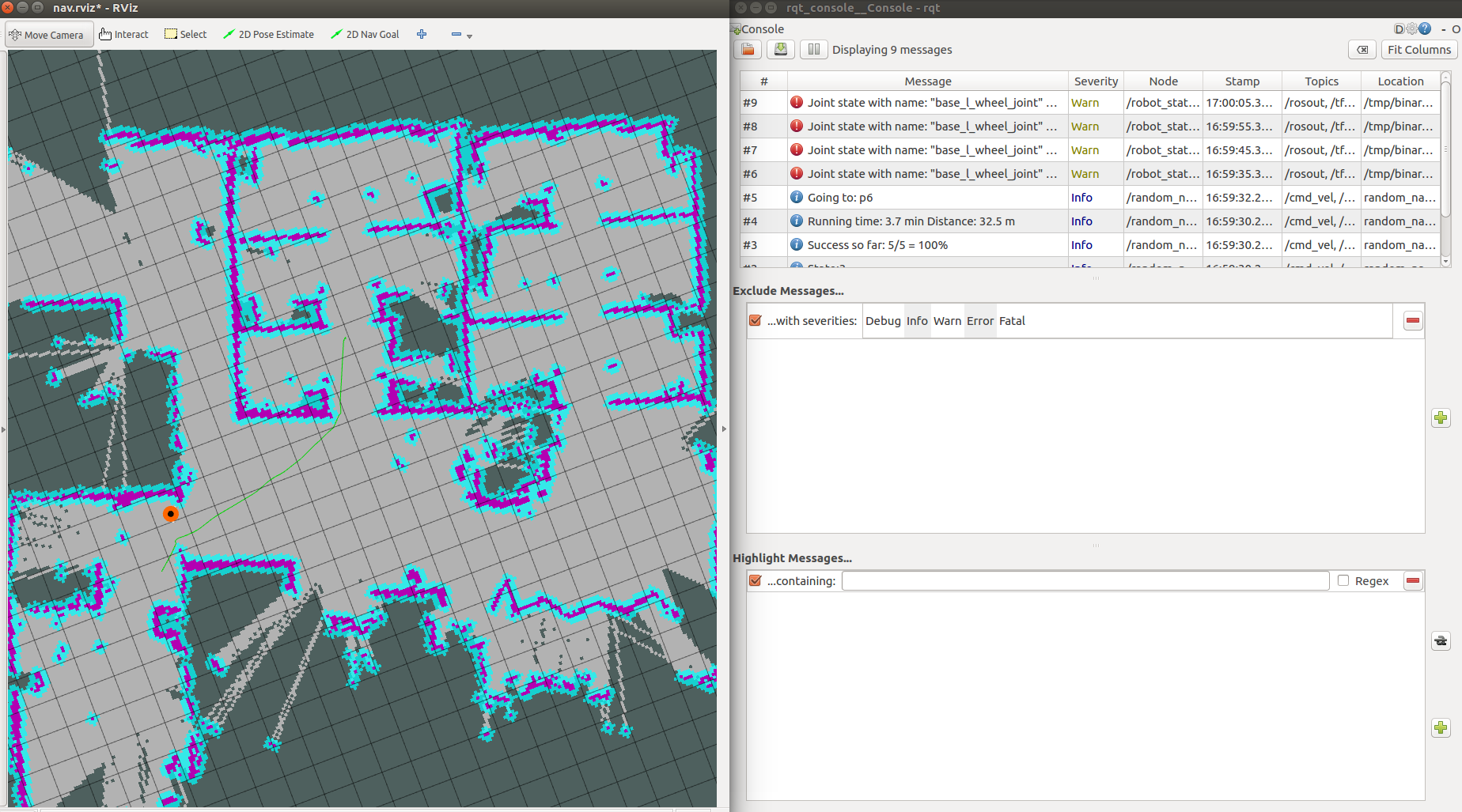
打开日志监控的可视化终端,可以看到机器人发布的距离信息、状态信息、目标点编号、成功率和速度等日志。
rqt_console
---------------------------------
效果如下:
-END-
最新文章
- 模拟微信上传图片(带预览,支持预览gif)
- reporting services rdl文件如何不分页
- Eclipse插件项目 引用其他类库的方法(jar)
- .Net用户控件
- 内网能PING通TELNET通不能访问解决
- sql中在查询时两列合并为一列
- .NET常用网络资源收藏
- js之replace实现简单模板替换引擎
- Java基础知识强化34:String类之String类的转换功能
- libeXosip2(2-2) -- eXosip2 network API
- Apache 日志配置,包含过滤配置
- JavaScript和JQuery获取DIV的值
- spring源码
- [bzoj3196]Tyvj 1730 二逼平衡树——线段树套平衡树
- 1084: [SCOI2005]最大子矩阵
- Problem K
- IDEA与eclipse:vm参数调优笔记
- kaggle-Digit Recognizer
- awk的用法
- poj 2524 求连通分量(并查集模板题)