Ubuntu16.04 安装ROS及其IDE
2024-10-11 15:04:33
一. ROS的安装
1. 进入ROS官方网站 http://wiki.ros.org/
2. Install -> ROS Kinetic Kame -> Ubuntu
3. 详情可参考所打开的界面,具体命令行代码将在下面列出
4. 哦对了,首先应该配置一下软件的下载源。点击右上角的设置 -> 系统设置 -> 软件和更新 -> 下载自选择其他站点 -> 选择清华园的服务器
5. 安装ROS具体命令行如下:
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
sudo apt-key adv --keyserver hkp://ha.pool.sks-keyservers.net:80 --recv-key 421C365BD9FF1F717815A3895523BAEEB01FA116
sudo apt-get update
sudo apt-get install ros-kinetic-desktop-full
sudo rosdep init
rosdep update
echo "source /opt/ros/kinetic/setup.bash" >> ~/.bashrc
source ~/.bashrc
sudo apt install python-rosinstall python-rosinstall-generator python-wstool build-essential
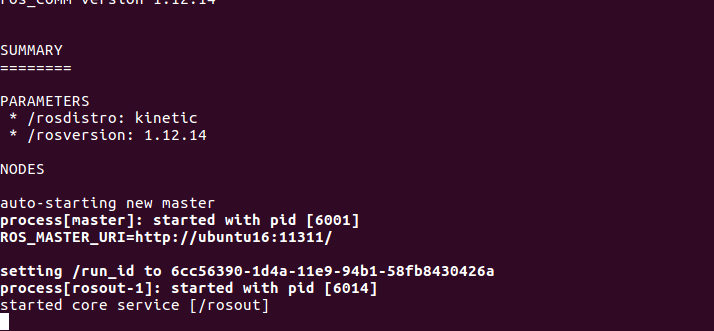
6. 重新打开一个命令行,输入 roscore,回车,出现如下界面表示安装成功
二. IDE:Roboware的安装
1. 推荐包安装方式,方便简单。打开官网 http://cn.roboware.me/#/Download
2. 选择Roboware Studio,下载Linux 64位版本
3. 双击下载包安装
4. 在命令行输入 roboware-studio,回车即可打开IDE
最新文章
- mac gem install nokogiri error
- CCNA网络基础(一)
- 判断网络是否连接 和 判断GPS是否连接
- visual studio 2013 秘钥
- IE Unknown runtime error
- codevs 1704 卡片游戏
- VS2010 常用快捷键
- openfire插件开发1
- 【Python笔记】异常处理
- Html笔记(四)图像
- [XML] ResourceManager一个操作Resource的帮助类 (转载)
- Notepad++ Java开发环境配置
- Linux 内存管理知识学习总结
- boost库使用:仿SGI-STL实现的一个树节点allocator
- Tomcat配置一个ip绑定多个域名
- Centos7 安装mysql-8.0.13(rpm)
- 对于996.ICU这个热门话题,一个在校学生的思考
- sql server 错误日志errorlog
- 在HyperLedger Fabric中启用CouchDB作为State Database
- webhook: requestbin
热门文章
- 「深度剖析」程序员因为奇葩需求暴打pm,然后被双双开除
- 【页面置换算法】LRC算法和FIFS算法
- 实验三:分别用for,while;do-while循坏语句以及递归的方法计算n!,并输出算式。
- python-监控日志练习
- DDD事件总线的实现
- NET Core微服务之路:基于Ocelot的API网关Relay实现--RPC篇
- ReactNative问题随记1 Exception in thread "main" java.lang.RuntimeException: gradle-2.14.1-all.zip
- 使用BurpSuite进行双文件上传拿Webshell
- HashMap和HashTable简介和区别
- [Swift]LeetCode88. 合并两个有序数组 | Merge Sorted Array