Ubuntu16.04 + ROS下串口通讯
2024-09-08 02:07:54
本文参考https://blog.csdn.net/weifengdq/article/details/84374690
由于工程需要,需要Ubuntu16.04 + ROS与STM32通讯,主要有两种方案解决通讯,一种是在STM32上加载ROS库让STM32作为一个节点,发布自己的主题消息,在ROS上订阅STM32上发布的主题就可以接受消息,STM32订阅ROS上的主题即可接收消息。另一种方法是在ROS串口输出数据,STM32通过普通串口形式接收字符串。下面是我通过Ubuntu16.04 + ROS通过串口助手测试ROS上收数据。
1、建立新的工作空间
mkdir -p ~/catkin_ws/src
2、打开catkin_ws/src
cd ~/catkin_ws/src
3、在src内创建一个C++工程
catkin_create_pkg serial_communication roscpp std_msgscd serial_communication/src
touch serial_communication.cpp
gedit serial_communication.cpp
4、编辑serial_communication.cpp 内容如下:
#include <string>
#include <ros/ros.h> // 包含ROS的头文件
#include <boost/asio.hpp> //包含boost库函数
#include <boost/bind.hpp>
#include "std_msgs/String.h" //ros定义的String数据类型 using namespace std;
using namespace boost::asio; //定义一个命名空间,用于后面的读写操作 unsigned char buf[12]; //定义字符串长度 int main(int argc, char **argv)
{ ros::init(argc, argv, "serial_communication"); //初始化节点
ros::NodeHandle n; ros::Publisher chatter_pub = n.advertise<std_msgs::String>("chatter", 1000); //定义发布消息的名称及sulv ros::Rate loop_rate(10); io_service iosev;
serial_port sp(iosev, "/dev/ttyACM0"); //定义传输的串口
sp.set_option(serial_port::baud_rate(115200));
sp.set_option(serial_port::flow_control());
sp.set_option(serial_port::parity());
sp.set_option(serial_port::stop_bits());
sp.set_option(serial_port::character_size(8)); while (ros::ok())
{
//write(sp, buffer(buf1, 6)); //write the speed for cmd_val
//write(sp, buffer("Hellq world", 12));
read(sp, buffer(buf));
string str(&buf[0], &buf[11]); //将数组转化为字符串
//if (buf[10] == '\n')
{
std_msgs::String msg;
std::stringstream ss;
ss << str; msg.data = ss.str(); ROS_INFO("%s", msg.data.c_str()); //打印接受到的字符串
chatter_pub.publish(msg); //发布消息 ros::spinOnce(); loop_rate.sleep();
}
} iosev.run();
return 0;
}
5、保存后, 打开 ~/catkin_ws/src/serial_communication/CMakeLists.txt, 最后面加上:
add_executable(serial_communication src/serial_communication.cpp)
target_link_libraries(serial_communication ${catkin_LIBRARIES})
6、编译工作空间
cd ~/catkin_ws
catkin_make
7、开启一个新的终端 输入:
roscore
8、新开启另一个终端 输入:查看端口号
ls -l /dev |grep ttyUSB
9输入: 启动串口看是否有报错
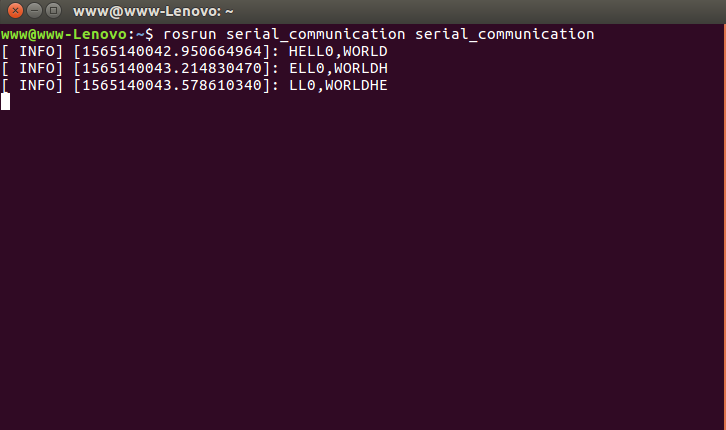
rosrun serial_communication serial_communication
如出现下图,是因为端口号没有获取读写权限

10、输入: 获取权限
sudo chmod 777 /dev/ttyUSB0
11、最后结果: 使用串口发送的HELLO WORLD
最新文章
- ZooKeeper:Java客户端网络处理
- 拓扑编号 vijos1790
- asp.net mvc 如何调用微信jssdk接口:分享到微信朋友(圈)| 分享到qq空间
- Json的序列化和反序列化
- liunx之:rpm包安装
- uva 10859
- 如何用visual studio控件(repeater)绑定数据库(SQL server)信息并显示
- OC——网络解析获取图片的应用
- ASP.NET从MVC5升级到MVC6
- SharePoint 2010 Form Authentication (SQL) based on existing database
- 超详细的 Linux CentOS 编译安装python3
- Struts2实现文件上传(三)
- Hadoop 的 TotalOrderPartitioner
- 获取radio、select、checkbox标签选中的值
- C/C++ 程序库
- ECMAscript5中的map
- verilog task2
- 弟三周作业之VS2015
- EasyNetQ介绍
- 【java规则引擎】《Drools7.0.0.Final规则引擎教程》第4章 4.2 activation-group& dialect& date-effective