pytorch——不用包模拟简单线性预测,数据类型,创建tensor,索引与切片
2024-09-06 00:55:39
常见的学习种类
线性回归,最简单的y=wx+b型的,就像是调节音量大小。逻辑回归,是否问题。分类问题,是猫是狗是猪
最简单的线性回归y=wx+b
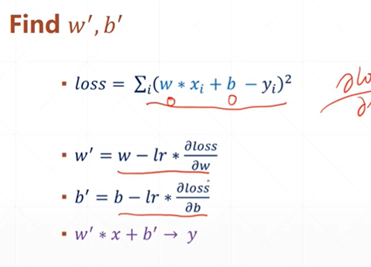
目的:给定大量的(x,y)坐标点,通过机器学习来找出最符合的权重w和偏置b
损失指的是每个点进行wx+b-y然后平方累加,是用来估量模型的预测值f(x)与真实值Y的不一致程度。
根本的方法是首先要给出人工设定初始的w和b值,然后计算损失对于w和对于b的梯度,来找到下降梯度。
使得w和b往下降梯度变化来使得损失越来越小,w和b的值越来越精确的过程。
lr是学习效率,人为设定的值,学习效率乘以损失在w和b上的倒数相当于是下一代w和b所走的步长
通过迭代来使w和b往下降方向走,且每一次更新w‘和b'的值然后计算损失再迭代。
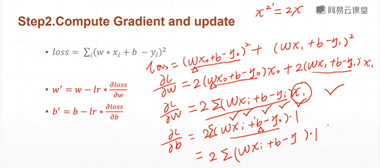
红字手写计算出w和b的更新值(w和b的倒数)得公式
对于手写数字的识别
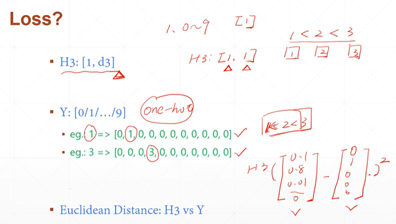
对于数字1的正确对应的是[0,1,0,....,0]对于数字3正确对应的是[0,0,0,3,0,.....,0]
pytorch数据类型与创建tensor
import torch
import numpy as np
a=torch.tensor(3.33)
print(a)
print(a.type()) #使用type()来查看当前的数据类型
print(isinstance(a,torch.FloatTensor)) #查看是不是浮点型的
#注意数据类型是分cpu型和gpu型号的,不同的是不同的 #生成标量,维度是0的
b=torch.tensor(2.2)
print(b.shape)
print(b.size()) #生成向量,维度为1的
c=torch.tensor([2.2])
print('一维向量且只有一个元素',c)
c=torch.tensor([2.2,3.3,4.4])
print('一维向量3个元素',c)
c=torch.FloatTensor(1)
print('随机生成一维向量1个元素',c)
c=torch.FloatTensor(2)
print('随机生成一维向量两个元素',c)
numpydata=np.array([1,2,3])
c=torch.from_numpy(numpydata)
print('从numpy导入',c) #生成向量,维度为2的 (二维的应用场景,比如(2,3)表示的是有两个数字,每个数字用一个三维向量表示)
d=torch.randn(2,3) #正态分布生成2行3列的浮点数阵
print(d)
print(d.size())
print('注意,size可以索引',d.size(0)) #生成向量,维度为3的 (三维德应用场景比如(3,3,3)。一个句子有有三个字,然后有三个句子,每一个字用一个三维向量表示)
e=torch.rand(3,3,3) #正态分布生成3行3列的浮点数阵
print(e)
print('注意,e可以索引',e[0])
#可以用list直接把e.shape转成 #生成向量,维度为4的 (四维德应用场景图片比如(3,3,4,4)。有三张照片,每个照片有三个通道(rgb),然后每一个通道的长宽是4*4)
f=torch.rand(2,2,4,4) #正态分布生成3行3列的浮点数阵
print(f) #获取具体元素个数,所占大小
print(e.numel())
#获取维度
print(e.dim())
#torch.tensor()里面直接给numpy的数据
#torch.FloatTensor()里面给shape的形式如torch.FloatTensor(2,3) #生成未初始化的
# 推荐使用的是torch.FloatTensor()类型,比如
cd=torch.FloatTensor(2,2,4,4)
print('这里是FloatTensor生成未初始化的',cd)
#推荐使用的是torch.IntTensor()类型,比如
cd=torch.IntTensor(2,2)
print('这里是IntTensor生成未初始化的',cd) #设置成更加高精度的tensor类型
torch.set_default_tensor_type(torch.DoubleTensor)
#0---1之间生成随机数
a=torch.rand(3,3)
#把a的shape读出来然后再放进torch.rand
torch.rand_like(a)
#区间之间生成随机数
sd=torch.randint(1,9,(3,3))
print(sd)
#使用torch.normal生成,mean=torch.full([10],0)代表生成10个为0的数。std=torch.arange(1,0,-0.1)代表生成数的方差从1到0每次减0.1
# pc=torch.normal(mean=torch.full([10],0),std=torch.arange(1,0,-0.1))
# print(pc) #生成全部为某个数的tensor
print(torch.full([2,3],5))
#arange生成区间内的数
print(torch.arange(0,10,2))
#linspace等分生成区间内的数,4为切成四块
print(torch.linspace(0,10,4))
#生成全部是1的
print(torch.ones(3,3))
#生产全部是0的
print(torch.zeros(3,3))
#生成对角阵
print(torch.eye(3,3))
#随机打乱生成区间
print('randperm打乱',torch.randperm(10))
索引与切片
import torch
import numpy as np a=torch.rand(3,3,5,5)
#假设是3张图片,3个通道,每个通道的长5宽5
print(a)
print('站在某一张图片的立场上看shape',a[0].shape)
print('站在开头到1图片的立场上看shape',a[:2].shape)
print('站在某一个通道的立场上看shape',a[0,0].shape)
print('看第一张图的第一个通道的(1,1)像素点',a[0,0,1,1])
print('看第一张图的第一个通道的(0,0)(0,1)(1,0)(1,1)像素点',a[0,0,:2,:2])
print('隔行采样看第一张图的第一个通道的(0,0)(0,2)(2,0)(2,2)像素点,步长为2',a[0,0,:3:2,:3:2]) #使用index_select索引
print('使用index_select索引',a.index_select(0,torch.tensor([0,1])))#第一个0代表的是对图片维度执行操作,采集的是第一个和第二个图片
print('使用index_select索引',a.index_select(1,torch.tensor([0,1])))#第一个0代表的是对通道执行操作,采集的是第一个和第二个通道 #mask掩码
sd=torch.rand(3,3)
print('未掩码前',sd)
sdmask=sd.ge(0.5) #筛选出大于0.5的
print('掩码后',sdmask)
print('筛选出大于0.5的',torch.masked_select(sd,sdmask))
维度操作
#维度变换
import torch
import numpy as np #改变形状
a=torch.rand(3,3,5,5)
print(a)
#假设是3张图片,3个通道,每个通道的长5宽5 元素的总大小是3*3*5*5=225
b=a.reshape(3,3*25) #只要元素的总大小不变都能reshape
print('改成3行75列的矩阵',b) #将3张图片每张图片用75的向量来表示 #增加维度
a=torch.rand(3,3,5,5)
a=a.unsqueeze(0) #在a的0索引前面加上一个维度1。
#假设原来是3张图片,3个通道,每个通道的长5宽5 ,现在是1个组里有3张图片,3个通道,每个通道的长5宽5
print(a.shape)
a=a.unsqueeze(-1) #在a的-1索引后面加上一个维度1。
print(a.shape) #减少维度
sd=torch.rand(1,5,1,1)
print('无输入数字时会把所有的1的维度全给他删除了',sd.squeeze().shape)
print('输入数字时会把指定的1的维度删除了',sd.squeeze(2).shape) #增加维度内的元素,也就是[1,5,1,1]变成[4,5,3,3]的过程
#!!!!!注意1变N是可以的,但是5变N是不行的!!!!!
sd=torch.rand(1,5,1,1)
print(sd.expand(4,5,3,3).shape) #矩阵转置,只能使用2d的
sd1=torch.rand(4,5)
print(sd1.t().shape) #确认两个tensor的一致性
t1=torch.tensor([1,2,3])
t2=torch.tensor([1,2,3])
print('检查一致性',torch.all(torch.eq(t1,t2))) #维度变化与恢复
a=torch.rand(3,3,5,5)
a1=a.transpose(1,2).contiguous().reshape(3,75).reshape(3,5,3,5).transpose(1,2) #transport变化时记得写contiguous
print('检查变化前后是否相同',torch.all(torch.eq(t1,t2)))
自动拓展示例

四张图片,三个通道,每个通道32*32个像素点
在[4,3,32,32]上加[32,32]代表的是在每个通道的32*32的像素点上加上一组32*32的基地
在[4,3,32,32]上加[3,1,1]代表的是对每一个通道的每一个像素点都加上一个固定的值
在[4,3,32,32]上加[1,1,1,1]代表的是对所有的照片的所有的通道的长宽都加上一个固定的值
最新文章
- Python NaN
- css3实现3D立体翻转效果
- BZOJ3506/1502 [CQOI2014]排序机械臂
- SVD小结
- eclipse的快捷键大全
- linux代码段,数据段,BSS段, 堆,栈(二)
- 土法炼钢:怎么实现一个简单的B+Tree In-Disk
- MySQL 数据库中用户表中口令登陆设置
- System.Data.DbType的字符串和数据库中字符串类型对应关系
- SQLServer -- 递归查询树结构表
- oracle数据泵之解决方案(用户)导入导出。
- What is an http upgrade?
- 基于嵌入式OS的任务设计-----任务划分
- VMware Workstation 12 Player之安装林耐斯-Linux Red Hat 7 -系统
- 前端开发者常用的9个JavaScript图表库
- ( 转 ) CORS 有一次 OPTIONS 请求的原理
- RTC及sensor时间同步
- Leetcode中值得一做的题
- css3实现条纹以及方格斜纹背景
- supersocket 遇到的Failed to initialize 和 log4net用法