μC/OS-II 要点分析 ------ PendSV_Handler
首先贴出今天要与大家分享的内容源码(位于内核源码的 os_cpu_a.asm 中):
PendSV_Handler
CPSID I
MRS R0, PSP
CBZ R0, PendSV_Handler_Nosave
SUBS R0, R0, #0x20
STM R0, {R4-R11}
LDR R1, =OSTCBCur
LDR R1, [R1]
STR R0, [R1]
PendSV_Handler_Nosave
PUSH {R14}
LDR R0, =OSTaskSwHook
BLX R0
POP {R14}
LDR R0, =OSPrioCur
LDR R1, =OSPrioHighRdy
LDRB R2, [R1]
STRB R2, [R0]
LDR R0, =OSTCBCur
LDR R1, =OSTCBHighRdy
LDR R2, [R1]
STR R2, [R0]
LDR R0, [R2]
LDM R0, {R4-R11}
ADDS R0, R0, #0x20
MSR PSP, R0
ORR LR, LR, #0x04
CPSIE I
BX LR
这两段代码尤为重要,内核中任务的切换主要就是由它们实现的。接下来,我将逐行为大家解析其中的奥秘。
这两段代码是中断服务程序(ISR),那么由谁来触发中断呢?我们以OSCtxSw()这个函数为入手点。
它其实就是C程序中的OS_TASK_SW()
#define OS_TASK_SW() OSCtxSw()
开始分析OSCtxSw()
OSCtxSw
PUSH {R4, R5}
LDR R4, =NVIC_INT_CTRL
LDR R5, =NVIC_PENDSVSET
STR R5, [R4]
POP {R4, R5}
BX LR
1.首先进入函数,将R4,R5入栈,保护寄存器。
2.给R4,R5分别赋值,文件中这样定义:
NVIC_INT_CTRL EQU 0xE000ED04
NVIC_PENDSVSET EQU 0x10000000
NVIC_INT_CTRL为中断控制寄存器的地址,NVIC_PENDSVSET为PendSV中断的触发值
3.将触发值写入控制寄存器
4.弹出R4,R5
因为我们一般调用任务切换的时候,都是在临界区调用(禁止中断),所以不会产生中断。之后调用OS_EXIT_CRITICAL()函数退出临界区后,中断才会发生,这样就产生了PendSV异常。
接下来才是我们的重点,开始分析ISR!
CPSID I
#关中断,防止切换任务期间被打扰
MRS R0, PSP
#取出PSP(程序栈指针)赋值给R0
CBZ R0, PendSV_Handler_Nosave
#若R0为0,则跳转到PendSV_Handler_Nosave函数继续执行,这里我们讲述的就是由延时导致的任务切换,PSP都是有值的,所以继续执行
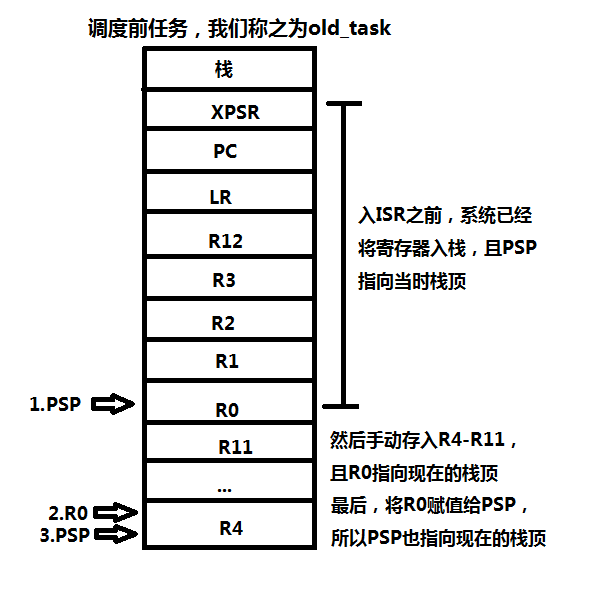
SUBS R0, R0, #0x20
#将R0 - 0x20 则R0与PSP之间空出8个单位(每个单位4个字节)
STM R0, {R4-R11}
#将寄存器的R4-R11存入空出的8个单位
LDR R1, =OSTCBCur
#将当前TCB的地址赋给R1
LDR R1, [R1]
#取出地址处的数据(即OSTCBCur->SP的地址,因为OSTCB结构体的第一个数据就是SP)赋给R1
STR R0, [R1]
#将R0(栈顶数据的地址)赋值给OSTCBCur->SP,则OSTCBCur->SP与R0指向的位置相同
!!这段程序的OSTCBCur指的都是old_task的指针
这段程序的图解:
PUSH {R14}
LDR R0, =OSTaskSwHook
BLX R0
POP {R14}
#这小段代码就是执行OSTaskSwHook这个C的函数
LDR R0, =OSPrioCur
LDR R1, =OSPrioHighRdy
LDRB R2, [R1]
STRB R2, [R0]
#这小段代码就将OSPrioHighRdy赋给OSPrioCur
LDR R0, =OSTCBCur
LDR R1, =OSTCBHighRdy
LDR R2, [R1]
STR R2, [R0]
#这小段代码就将OSTCBHighRdy->SP赋给OSPrioCur->SP
LDR R0, [R2]
#将OSTCBHighRdy->SP的值(指向新任务栈中的地址,也就是新任务的栈顶)赋值给R0
LDM R0, {R4-R11}
#以R0为基址,读出8个单位的数据给CPU的寄存器
ADDS R0, R0, #0x20
#R0地址 + 0x20,指向几个重要的寄存器值(当前栈顶)
MSR PSP, R0
#将当前R0的值赋值给PSP
ORR LR, LR, #0x04
#确保异常返回后,新任务使用PSP指针
CPSIE I
#开启中断
!!这段程序的OSTCBCur指的都是new_task的指针
这段程序的图解:
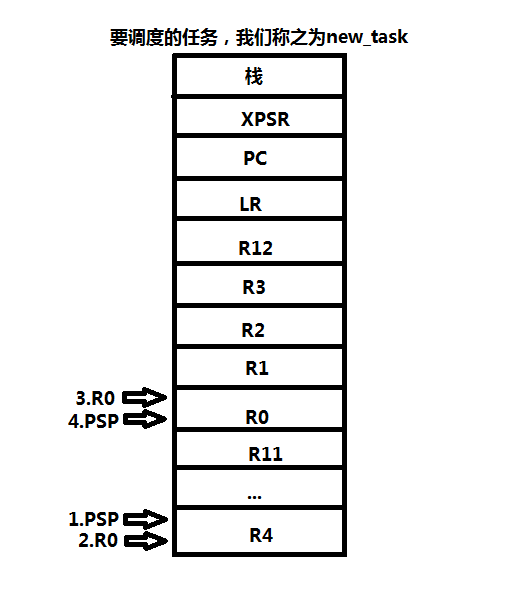
这样也就完成了old_task到new_task的切换!
最新文章
- 为你的Web程序加个启动画面
- MOCK DATA -- node路由
- Codeforces Round #199 (Div. 2) E. Xenia and Tree
- 使用BeanUtils操作Bean属性
- NHibernate - ICriteria 查询
- Android_AsyncTask_Method
- truncate和 delete的区别:
- IAR FOR ARM 7.2.2破解方法
- iOS 定位服务、通讯录、日历、提醒事项、照片、蓝牙共享、麦克风、相机等授权检测
- Java第四周学习日记
- Java web 基础
- #pragma详解
- scrapy学习笔记(1)
- C#中添加对象到ArrayList的代码
- 【Guava】使用Guava的RateLimiter做限流
- CentOS 6.5 安装mysql 过程记录
- poj 2226 Muddy Fields(水二分图)
- h5手机点击返回键,刷新页面
- 畅通工程续(HDU 1874)附上超详细源代码
- python:序列化与数据持久化