Unity3D 向量运算
写在前面的话,前两天有个朋友在QQ上问我 如何获取主角面朝方向一定区域中的敌人对象。这个命题看似简单,其实里面蕴含了很多数学方面的东西。今天刚好有时间我就彻底的把这个疑问写在博客中。希望可以帮助到他。
在上代码之前请大家跟我先做几个简单的练习题,角度向量的计算一定要学会,不然后面的东西会很难懂。
1.已知3D坐标,和一个旋转角度,以及一段距离,求目标点的3D坐标。
已知当前点为Target,目标点沿着Target的Y轴旋转30度,沿着Target的X轴延伸10米求目标点的3D坐标?
using System.Collections; public class Test : MonoBehaviour
{ public Transform Target; void LateUpdate ()
{
Quaternion rotation = Quaternion.Euler(0f,30f,0f) * Target.rotation;
Vector3 newPos = rotation * new Vector3(10f,0f,0f);
Debug.DrawLine(newPos,Vector3.zero,Color.red);
Debug.Log("newpos " + newPos +" nowpos " + Target.position + " distance " + Vector3.Distance(newPos,Target.position));
} }
输出结果 :新坐标 (8.7, 0.0, -5.0) 当前坐标 (0.0, 0.0, 0.0)两点之间的距离 10。
2.已知3D模型的角度求它的向量。
已知3D模型Target,Y轴旋转30度后向前平移。
using UnityEngine;
using System.Collections; public class Test : MonoBehaviour
{ public Transform Target; void LateUpdate ()
{ if(Input.GetMouseButton(0))
{
Quaternion rotation = Quaternion.Euler(0f,30f,0f) * Target.rotation;
Vector3 newPos = rotation * Vector3.forward;
Target.Translate(newPos.x,newPos.y,newPos.z);
}
} }
3.已知一个目标点,让模型朝着这个目标点移动。
Target.transform.LookAt(new Vector3 (100f,200f,300f));
Target.Translate(Vector3.forward);
这里我要说的就是Vector3.forward ,它等价与 new Vector3(0,0,1);它并不是一个坐标,它是一个标准向量,方向是沿着Z轴向前。这样平移一次的距离就是1米, 如果Vector3.forward * 100那么一次平移的距离就是100米。
在看看下面这段代码
这是一个比较简单的例子,大家应该都能看明白。
Vector3 vecn = (TargetCube.position - Target.position).normalized;
Target.Translate(vecn *0.1f);
用向量减去一个向量求出它们的差值,normalized 是格式化向量,意思是把它们之间向量格式化到1米内。这样就可以更加精确的计算一次平移的距离了 vecn *0.1f 就标示一次平移1分米,蛤蛤。
向量不仅可以进行X Y Z轴的移动,同样可以进行旋转 ,下面这段代码就是让向量沿着Y轴旋转30度。
Vector3 vecn = (TargetCube.position - Target.position).normalized;
vecn = Quaternion.Euler(0f,30f,0f) * vecn;
Target.Translate(vecn *0.1f);
如果上述三道简单的练习题 你都能了然于心的话,那么本文最大的难题我相信也不会是什么难事,继续阅读吧。
假设我们需要计算主角面前5米内所有的对象时。以主角为圆心计算面前5米外的一个点,为了让大家看清楚我现将这条线绘制出来。
private float distance = 5f;
void Update ()
{
Quaternion r= transform.rotation;
Vector3 f0 = (transform.position + (r *Vector3.forward) * distance);
Debug.DrawLine(transform.position,f0,Color.red);
}
如下图所,我们已经将这两个点计算出来了。此时你可以动态的编辑主角Y轴的坐标,这个点永远都是沿着主角当前角度面前5米以外的点。

接下来,我们需要计算主角面前的一个发散性的角度。假设主角看到的是向左30度,向右30度在这个区域。
void Update ()
{
Quaternion r= transform.rotation;
Vector3 f0 = (transform.position + (r *Vector3.forward) * distance);
Debug.DrawLine(transform.position,f0,Color.red); Quaternion r0= Quaternion.Euler(transform.rotation.eulerAngles.x,transform.rotation.eulerAngles.y - 30f,transform.rotation.eulerAngles.z);
Quaternion r1= Quaternion.Euler(transform.rotation.eulerAngles.x,transform.rotation.eulerAngles.y + 30f,transform.rotation.eulerAngles.z); Vector3 f1 = (transform.position + (r0 *Vector3.forward) * distance);
Vector3 f2 = (transform.position + (r1 *Vector3.forward) * distance); Debug.DrawLine(transform.position,f1,Color.red);
Debug.DrawLine(transform.position,f2,Color.red); Debug.DrawLine(f0,f1,Color.red);
Debug.DrawLine
}
如下图所示,这时主角面前的区域就计算出来了。看起来就是两个三角形之间的区域。

最后就是简单的套用公式,计算一个点是否在三角形内,在本文中就是计算敌人的点是否在面前的这两个三角形内。
using System.Collections;
public class MyTest : MonoBehaviour {
public Transform cube;
private float distance = 5f;
void Update ()
{
Quaternion r= transform.rotation;
Vector3 f0 = (transform.position + (r *Vector3.forward) * distance);
Debug.DrawLine(transform.position,f0,Color.red);
Quaternion r0= Quaternion.Euler(transform.rotation.eulerAngles.x,transform.rotation.eulerAngles.y - 30f,transform.rotation.eulerAngles.z);
Quaternion r1= Quaternion.Euler(transform.rotation.eulerAngles.x,transform.rotation.eulerAngles.y + 30f,transform.rotation.eulerAngles.z);
Vector3 f1 = (transform.position + (r0 *Vector3.forward) * distance);
Vector3 f2 = (transform.position + (r1 *Vector3.forward) * distance);
Debug.DrawLine(transform.position,f1,Color.red);
Debug.DrawLine(transform.position,f2,Color.red);
Debug.DrawLine(f0,f1,Color.red);
Debug.DrawLine(f0,f2,Color.red);
Vector3 point = cube.position;
if(isINTriangle(point,transform.position,f1,f0) || isINTriangle(point,transform.position,f2,f0) )
{
Debug.Log("cube in this !!!");
}else
{
Debug.Log("cube not in this !!!");
}
}
private float triangleArea(float v0x,float v0y,float v1x,float v1y,float v2x,float v2y)
{
return Mathf.Abs((v0x * v1y + v1x * v2y + v2x * v0y
- v1x * v0y - v2x * v1y - v0x * v2y) / 2f);
}
bool isINTriangle(Vector3 point,Vector3 v0,Vector3 v1,Vector3 v2)
{
float x = point.x;
float y = point.z;
float v0x = v0.x;
float v0y = v0.z;
float v1x = v1.x;
float v1y = v1.z;
float v2x = v2.x;
float v2y = v2.z;
float t = triangleArea(v0x,v0y,v1x,v1y,v2x,v2y);
float a = triangleArea(v0x,v0y,v1x,v1y,x,y) + triangleArea(v0x,v0y,x,y,v2x,v2y) + triangleArea(x,y,v1x,v1y,v2x,v2y);
if (Mathf.Abs(t - a) <= 0.01f)
{
return true;
}else
{
return false;
}
}
}
如下图所示,如果箱子对象是主角的视野中就会检测到。

注意,上图中我的视野选择了两个三角形,如果你需要视野目标点是椭圆形的话,那么可以多设置一些三角形。但是这样就会非常消耗效率,我觉得这里完全可以使用1个三角形,,只是正对的目标点会出现一些偏差,影响其实并不会很大。如下图所示

代码简单的修改一下即可。
public class MyTest : MonoBehaviour {
public Transform cube;
private float distance = 5f;
void Update ()
{
Quaternion r= transform.rotation;
Vector3 f0 = (transform.position + (r *Vector3.forward) * distance);
Debug.DrawLine(transform.position,f0,Color.red);
Quaternion r0= Quaternion.Euler(transform.rotation.eulerAngles.x,transform.rotation.eulerAngles.y - 30f,transform.rotation.eulerAngles.z);
Quaternion r1= Quaternion.Euler(transform.rotation.eulerAngles.x,transform.rotation.eulerAngles.y + 30f,transform.rotation.eulerAngles.z);
Vector3 f1 = (transform.position + (r0 *Vector3.forward) * distance);
Vector3 f2 = (transform.position + (r1 *Vector3.forward) * distance);
Debug.DrawLine(transform.position,f1,Color.red);
Debug.DrawLine(transform.position,f2,Color.red);
Debug.DrawLine(f1,f2,Color.red);
Vector3 point = cube.position;
if(isINTriangle(point,transform.position,f1,f2))
{
Debug.Log("cube in this !!!");
}else
{
Debug.Log("cube not in this !!!");
}
}
private float triangleArea(float v0x,float v0y,float v1x,float v1y,float v2x,float v2y)
{
return Mathf.Abs((v0x * v1y + v1x * v2y + v2x * v0y
- v1x * v0y - v2x * v1y - v0x * v2y) / 2f);
}
bool isINTriangle(Vector3 point,Vector3 v0,Vector3 v1,Vector3 v2)
{
float x = point.x;
float y = point.z;
float v0x = v0.x;
float v0y = v0.z;
float v1x = v1.x;
float v1y = v1.z;
float v2x = v2.x;
float v2y = v2.z;
float t = triangleArea(v0x,v0y,v1x,v1y,v2x,v2y);
float a = triangleArea(v0x,v0y,v1x,v1y,x,y) + triangleArea(v0x,v0y,x,y,v2x,v2y) + triangleArea(x,y,v1x,v1y,v2x,v2y);
if (Mathf.Abs(t - a) <= 0.01f)
{
return true;
}else
{
return false;
}
}
}
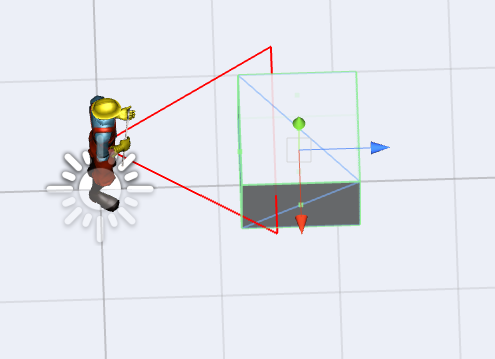
上面我们介绍了三角形判断,当然也可以通过矩形来判断是否相交。。

public class MyTest : MonoBehaviour {
public Transform cube;
private float distance = 5f;
void Update ()
{
Quaternion r= transform.rotation;
Vector3 left = (transform.position + (r *Vector3.left) * distance);
Debug.DrawLine(transform.position,left,Color.red);
Vector3 right = (transform.position + (r *Vector3.right) * distance);
Debug.DrawLine(transform.position,right,Color.red);
Vector3 leftEnd = (left + (r *Vector3.forward) * distance);
Debug.DrawLine(left,leftEnd,Color.red);
Vector3 rightEnd = (right + (r *Vector3.forward) * distance);
Debug.DrawLine(right,rightEnd,Color.red);
Debug.DrawLine(leftEnd,rightEnd,Color.red);
Vector3 point = cube.position;
if(isINRect(point,leftEnd,rightEnd,right,left))
{
Debug.Log("cube in this !!!");
}else
{
Debug.Log("cube not in this !!!");
}
}
private float Multiply(float p1x , float p1y, float p2x,float p2y, float p0x,float p0y)
{
return ((p1x - p0x) * (p2y - p0y) - (p2x - p0x) * (p1y - p0y));
}
bool isINRect(Vector3 point,Vector3 v0,Vector3 v1,Vector3 v2,Vector3 v3)
{
float x = point.x;
float y = point.z;
float v0x = v0.x;
float v0y = v0.z;
float v1x = v1.x;
float v1y = v1.z;
float v2x = v2.x;
float v2y = v2.z;
float v3x = v3.x;
float v3y = v3.z;
if (Multiply(x,y, v0x,v0y, v1x,v1y) * Multiply(x,y, v3x,v3y, v2x,v2y) <= 0 && Multiply(x,y, v3x,v3y, v0x,v0y) * Multiply(x,y, v2x,v2y, v1x,v1y) <= 0)
return true;
else
return false;
}
}
这里我以角色左右个30度。 这样就可以根据两个模型的距离以及角度来判断了。。
public class NewBehaviourScript : MonoBehaviour {
public Transform target;
void Update()
{
float distance = Vector3.Distance(target.position,transform.position);
Quaternion right = transform.rotation * Quaternion.AngleAxis(30,Vector3.up);
Quaternion left = transform.rotation * Quaternion.AngleAxis(30,Vector3.down);
Vector3 n = transform.position + (Vector3.forward * distance);
Vector3 leftPoint = left * n ;
Vector3 rightPoint = right *n ;
Debug.DrawLine(transform.position,leftPoint,Color.red);
Debug.DrawLine(transform.position,rightPoint,Color.red);
Debug.DrawLine(rightPoint,leftPoint,Color.red);
}
}
文章地址:http://www.xuanyusong.com/archives/1977
最新文章
- 多线程之信号量(By C++)
- win10 上运行 curl_init() 函数一直报错的解决办法
- php易混淆知识点
- JGibbLDA、GibbsLDA++问题解决
- [rm] Linux 防止"rm -rf /" 误删除
- csu 1303 Decimal (数论题)
- Struts2的工作流程
- 一个跨平台的 C++ 内存泄漏检测器
- Kafka单机版安装(CentOS 7环境下)
- 数据结构——求单向链表的倒数第K个节点
- iOS项目评估报告
- lua-01
- angularjs等号运算
- codevs 2606 约数和(分块优化数学公式 )
- js便签笔记(11)——浏览TOM大叔博客的学习笔记 part1
- [Module] 03 - Software Design and Architecture
- [SoapUI] 在Jenkins上传递project级别的参数给case
- 前端之css笔记3
- python包管理工具pip
- js img转换base64