《Stepwise Metric Promotion for Unsupervised Video Person Re-identification》 ICCV 2017
Motivation:
这是ICCV 17年做无监督视频ReID的一篇文章。这篇文章简单来说基于两个Motivation。
- 在不同地方或者同一地方间隔较长时间得到的tracklet往往包含的人物是不同的
- 一个tracklet里面,大多数图片帧对应的都是同一个人
以上两点虽然是假设,但是也是满足大部分条件下的客观事实,之后的一些操作便是基于这两点假设展开。
Introduction:
这篇文章的出发点在于避免ReID领域令人头疼的标注工作。至于为什么做基于Video的ReID作者解释道首先是因为video比image多很多信息,比如时空线索以及姿势变化等,并且video需要的tracklet也容易使用目标追踪技术得到,同时video也能够抵抗一些背景噪声。
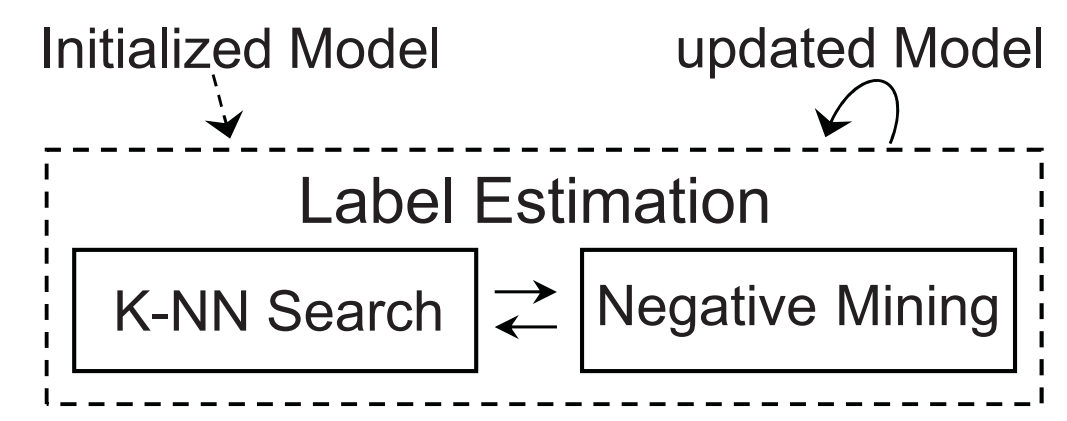
作者提出了一个渐进的学习框架。如果研究过无监督行人重识别,那么一定知道其中一个常见的方法就是打伪标签,然后不断在特征学习与伪标签赋值这两个过程中迭代以促进提取到的特征的准确性。这篇文章的做法也是这样,其流程如下所示。
Method:
从以上的框架图可以看出这篇文章主要需要讲清楚三件事情,一个是如何进行模型初始化,第二个是如何进行标签估计,以及如何使用估计标签进行模型更新。
(1)模型初始化
因为需要打伪标签,所以我们先要有一个基本可靠的模型。这里作者就基于两个假设出发,在行人重识别问题中,不同的相机对应着不同的地点,而同一相机下,只要保证拍摄间隔比较长,那么追踪得到的tracklet往往就是不同人物的。所以我们可以在同一个相机下得到$N$个不同人物的tracklet,而每个tracklet里面拥有$n_{i}, i=1, \dots, N$张图片,一个tracklet里面的$n_{i}$张图片按照假设2来说是拥有同一身份的。所以这就从假设出发构建了一个天然存在的标签关系,就能够使用这些图片去初始化模型。
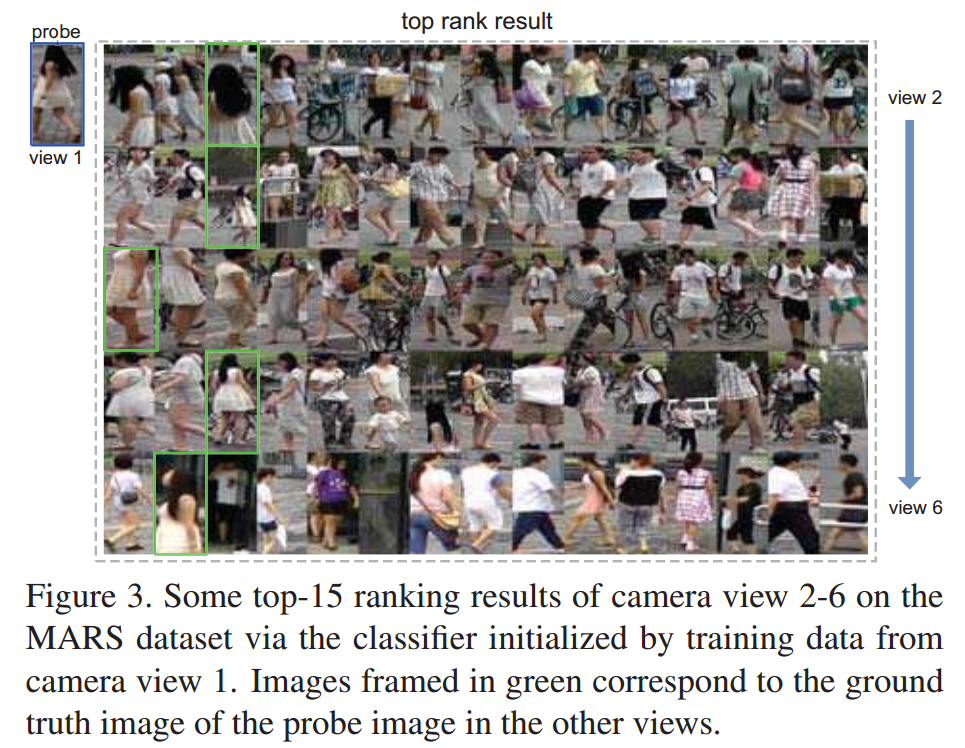
当然,问题并没有至此解决,因为行人重识别中真正困难的部分在于跨摄像头匹配,这样单一相机下学习到的模型往往在遇到多相机的匹配时就歇菜了。虽然表现不强,但是对于初始模型还是ok的。比如,作者使用MARS数据集的相机1做训练,之后在其他摄像头下执行搜索,效果如下所示:
(2)伪标签估计
这一步是这篇文章的重点,同样是基于前面两个假设。比如现在我们存在一个probe名为tracklet $p$,并且我们知道它是来自哪个相机的。现在我们用初始模型在这个相机下对$p$做检索,可以得到$M$个近邻 $x_{p}^{1}, x_{p}^{2}, \ldots, x_{p}^{M}$,基于假设1,这些tracklet一定和probe $p$包含的人物不同(如果$y_{p}$为1,它们则为0 ),我们令$X=\left\{x_{p}, x_{p}^{1}, \ldots, x_{p}^{M}\right\}$,对应的标签为$Y_{L}=\left\{y_{p}, y_{p}^{1}, \ldots, y_{p}^{M}\right\}$。可知$Y_{L}$是已知的。
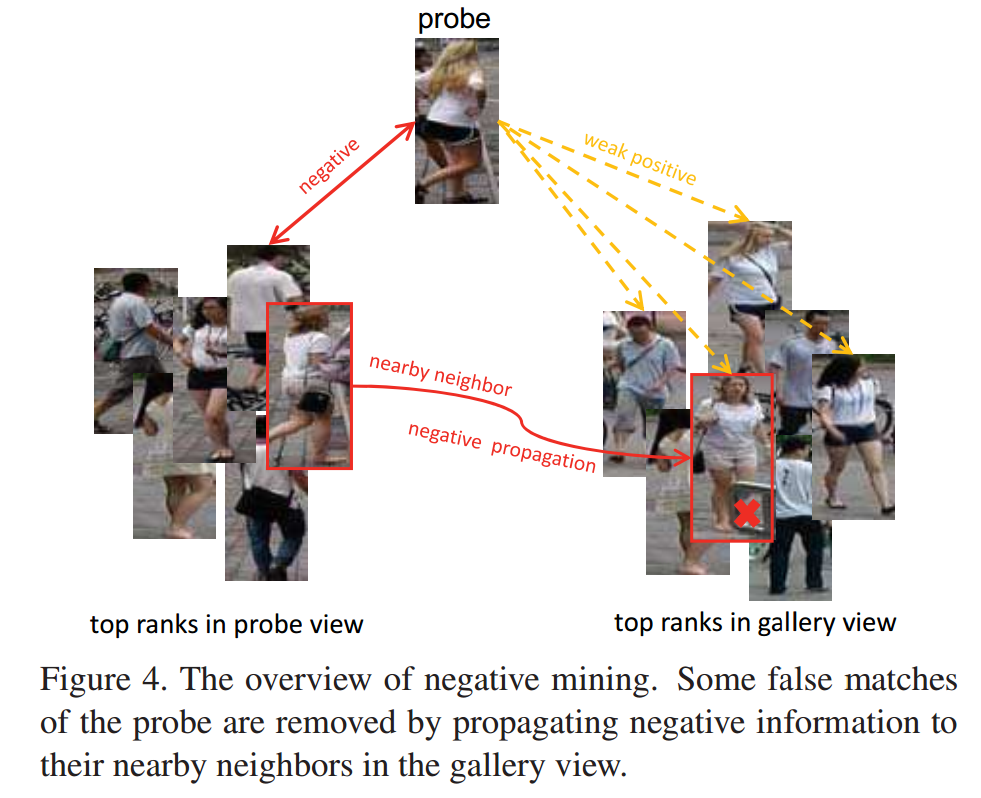
之后呢,我们在gallery中再对$p$进行检索,得到K个近邻$Y_{U}=\left\{y_{g}^{1}, \ldots, y_{g}^{K}\right\}$,它们对应的标签为$Y_{U}=\left\{y_{g}^{1}, \ldots, y_{g}^{K}\right\}$,这些标签是未知的。现在我们的目标是利用$X$和$Y_{L}$来估计$Y_{U}$。
为了做到这一点,首先需要建立样本之间关联,作者使用Mahalanobis 来做距离度量,$\sigma$是一个控制参数,使用了类似于softmax的方法来标准化样本间相似度。
$w_{i, j}=\exp \left(-\frac{d_{i, j}}{\sigma^{2}}\right)$
$P_{i, j}=\frac{w_{i, j}}{\sum_{k=1}^{K+M+1} w_{k, j}}$
这里的$P_{i, j}$就代表的是样本j和i的相似度。同样还定义了一个标签矩阵$\boldsymbol{Y}$,前面的$(K+1)$行是$Y_{L}$,剩下的是$Y_{U}$。标签传播为$Y \leftarrow P Y$。其中$Y_{L}$应该永远保持不变,我们把$P$分为四个部分:
$P=\left[\begin{array}{ll}{P_{L L}} & {P_{L U}} \\ {P_{U L}} & {P_{U U}}\end{array}\right]$
所以$Y_{U}=\left(I-P_{U U}\right)^{-1} P_{U L} Y_{L}$。
通过以上我们可以在$Y_{U}$中找出最大值位置所对应的gallery样本,然后将这一样本也进行上述操作,再查看它的最大值处是否对应为$p$。如果满足这一条件,则两者标签一致,也就是互近邻的关系。
(3)模型更新
作者这里将XQDA推广到无监督的U-XQDA,来对所有训练样本学习一个统一的投影$W$和距离度量$M$。在XQDA中W对应的Generalized Rayleigh Quotient 为:
$J(W)=\frac{W^{\top} \Sigma_{E} W}{W^{\top} \Sigma_{I} W}$
这里$\boldsymbol{\Sigma}_{I}$和$\Sigma_{E}$分别是类内差异和类间差异。对比XQDA,作者提出的方法利用标签自动标记集S1和标签估计集S2来更新模型。所以目标函数被写成是:
$J(W)=\frac{W^{\top}\left(\Sigma_{E, S_{1}}+\Sigma_{E, S_{2}}\right) W}{W^{\top}\left(\Sigma_{I, S_{1}}+\Sigma_{I, S_{2}}\right) W}$
上面的$\Sigma_{E, S_{1}}, \Sigma_{E, S_{2}}$和$\Sigma_{I, S_{1}}, \Sigma_{I, S_{2}}$是类外差异和类内差异。这个最大化问题也可以通过广义特征值分解来求解。

如上图所示,更新完模型后,就会再次用模型来估计标签和关联跨视角的tracklet。这两个过程不断迭代,直到不再产生新的跨视角tracklet对。
(4)测试阶段
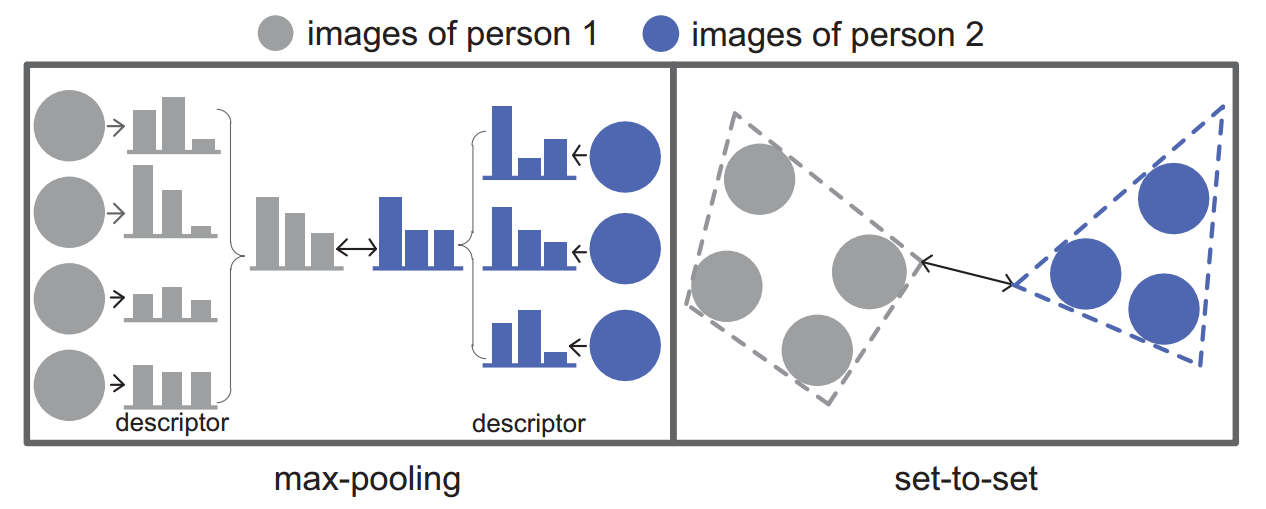
作者认为目前的所有基于视频的行人重识别方法都是在通过max-pooling使用点对点的距离来衡量相似度,而这里在训练阶段(比如无标签样本关联)和测试阶段都使用set-to-set的距离来度量tracklet可以带来更好的表现。
Experiments:
最新文章
- c语言——知识点
- [转]Git调用第三方对比工具beyondCompare
- You've got to find what you love
- jquery input选择弹框
- 【jmeter】参数化User Defined Variables与User Parameters
- opencv车道线检测
- weblogic 10域结构
- asp.net mvc NPOI 生成Excel文件
- 整理收藏一份PHP高级工程师的笔试题
- 【转】Android:Bluetooth 的打开和关闭--不错
- golang 线程与通道
- Python3 视频教程,全网最全的视频教程,爬虫,从入门到实战
- Linux系统下DHCP服务安装部署和使用详解
- springboot 默认异常处理
- python笔记22-常用模块
- Elasticsearch 5.x 字段折叠的使用
- (6)sudo命令详解(每周一个linux命令系列)
- iphone splash screen
- 【OpenPose-Windows】OpenPose+VS2015+Windows+CUDA8+cuDNN5.1 官方配置教程(转载)
- app横竖屏切换
热门文章
- postgreSQL使用sql归一化数据表的某列,以及出现“字段 ‘xxx’ 必须出现在 GROUP BY 子句中或者在聚合函数中”错误的可能原因之一
- Java之IO流技术详解
- Linux应急响应入门——入侵排查
- Mac 系统用mx master3遇到的问题
- 实验:Python图形图像处理
- uniapp复制到剪贴板
- php魔术方法小结
- @ConfigurationProperties(prefix = "server-options") 抛出 SpringBoot Configuration Annotation Processor not configured 错误
- Kafka 生产者解析
- 152. Maximum Product Subarray - LeetCode