关于步进电机驱动板,tb6560
2024-09-06 06:06:59
参考的,淘宝上买来的步进电机S曲线驱动方法,发现
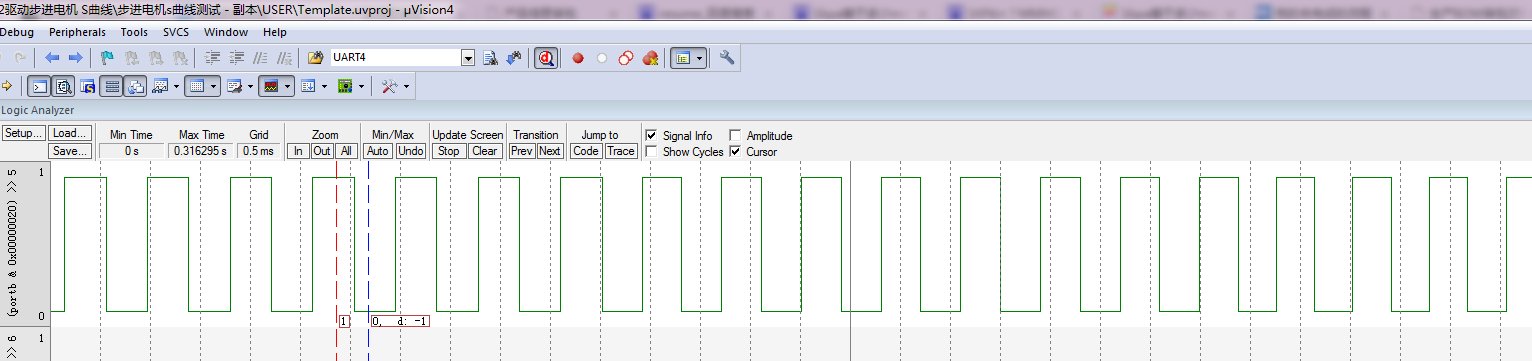
他程序输出的PWM波形全是方波, 占空比为50%
而且他
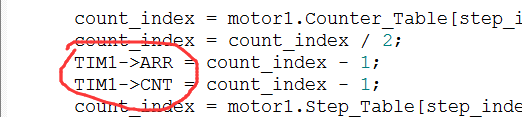
修改这两个数来输出波形,所以
我打算参考这个来写一个驱动
TIMX_CNT中放置的是当前计数值
即为:
修改计数器的计数值 ARR 和CNT
如下是修改后的 产生一个 50us高电平 100us低电平的程序
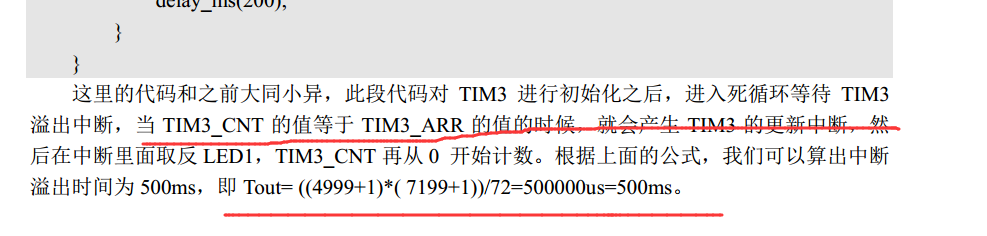
the flowing code is the timer3's init pro
1 //通用定时器3中断初始化
2 //这里时钟选择为APB1的2倍,而APB1为36M
3 // Tout =( (arr+1)*(psc+1) )/Ft us
4 //arr:自动重装值。
5 //psc:时钟预分频数
6 //这里使用的是定时器3!
7 void TIM3_Int_Init(u16 arr,u16 psc)
8 {
9 TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure ;
10 NVIC_InitTypeDef NVIC_InitStructure;
11
12 RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE); //时钟使能
13
14 //定时器TIM3初始化
15 TIM_TimeBaseStructure.TIM_Period = arr; //设置在下一个更新事件装入活动的自动重装载寄存器周期的值
16 TIM_TimeBaseStructure.TIM_Prescaler =psc; //设置用来作为TIMx时钟频率除数的预分频值
17 TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1; //设置时钟分割:TDTS = Tck_tim
18 TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM向上计数模式
19 TIM_TimeBaseInit(TIM3, &TIM_TimeBaseStructure); //根据指定的参数初始化TIMx的时间基数单位
20
21 TIM_ITConfig(TIM3,TIM_IT_Update,ENABLE ); //使能指定的TIM3中断,允许更新中断
22
23 //中断优先级NVIC设置
24 NVIC_InitStructure.NVIC_IRQChannel = TIM3_IRQn; //TIM3中断
25 NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0; //先占优先级0级
26 NVIC_InitStructure.NVIC_IRQChannelSubPriority = 3; //从优先级3级
27 NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道被使能
28 NVIC_Init(&NVIC_InitStructure); //初始化NVIC寄存器
29
30
31 TIM_Cmd(TIM3, ENABLE); //使能TIMx
32 }
the fllowing code is the TIM3_IRQHandler
1 //中断服务程序
2 void TIM3_IRQHandler(void) //TIM3中断
3 {
4 if (TIM_GetITStatus(TIM3, TIM_IT_Update) != RESET) //检查TIM3更新中断发生与否
5 {
6 TIM_ClearITPendingBit(TIM3, TIM_IT_Update ); //清除TIMx更新中断标志
7 //LED1=!LED1;
8 //LED0=!LED0;
9 //CLK=!CLK;
10 //GPIO_SetBits(GPIOB,GPIO_Pin_5);
11
12 // if(MyPwmChangeFlag==0)// if is 0 do low process
13 // {
14 // GPIO_ResetBits(GPIOB,GPIO_Pin_5);
15 // TIM3_Int_Init(MyPwmPeriod-MyPwmHigh-1,72-1);
16 // TIM_Cmd(TIM3, ENABLE); //使能TIMx
17 // MyPwmChangeFlag=1;
18 // }
19 // else if(MyPwmChangeFlag==1)
20 // {
21 // GPIO_SetBits(GPIOB,GPIO_Pin_5);
22 // TIM3_Int_Init(MyPwmHigh-1,72-1);
23 // TIM_Cmd(TIM3, ENABLE); //使能TIMx
24 // MyPwmChangeFlag=0;
25 // }
26 CLK=~CLK;
27 if(MyPwmChangeFlag)
28 {
29 TIM3->ARR=99;
30 TIM3->CNT=0;
31 MyPwmChangeFlag=0;
32 }
33 else
34 {
35 TIM3->ARR=49;
36 TIM3->CNT=0;
37 MyPwmChangeFlag=1;
38 }
39
40
41 }
42 }
最新文章
- 手把手教你做个人 app
- ThinkPHP v3.2.3 数据库读写分离,开启事务时报错:There is no active transaction
- CSS 伪类
- Struts2中的OGNL通配符
- ELK_elk+redis 搭建日志分析平台
- ContentProvider官方教程(5)ContentResolver插入、更新、删除 示例
- CAGradientLayer
- 生成json对象
- i++与++i的误解
- Android NDK调试方式之一: adb logcat
- Spring MVC中如何传递对象参数
- R与数据分析旧笔记(⑦)回归诊断
- 201521123091 《Java程序设计》第13周学习总结
- SSM-SpringMVC-26:SpringMVC异常骇级之自定义异常注解版
- Go 编译原理实现计算器(测试驱动讲解)
- JavaJDK8新特性相关知识整理
- 外部tomcat发布springboot项目步骤和异常处理:java.lang.NoClassDefFoundError: javax/el/ELManager
- day9 集合操作
- For each loop in Native C++
- Android webview 退出时关闭声音 4.视频全屏 添加cookie