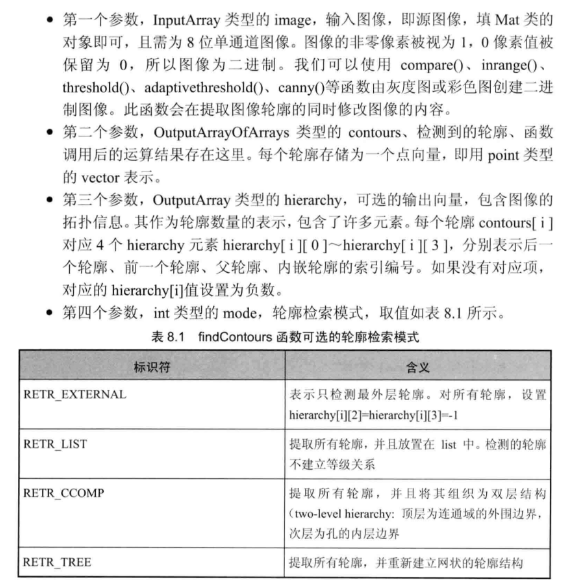
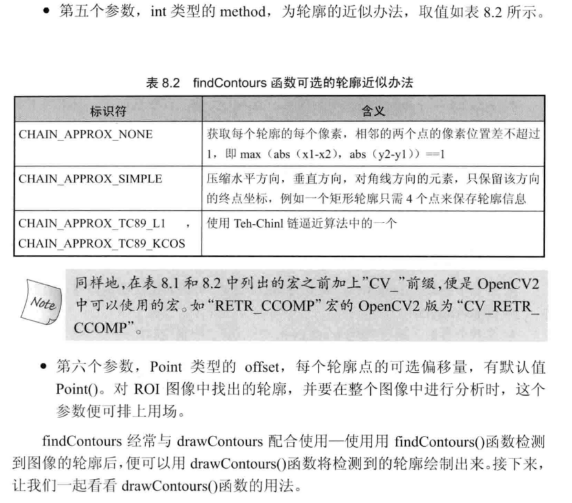
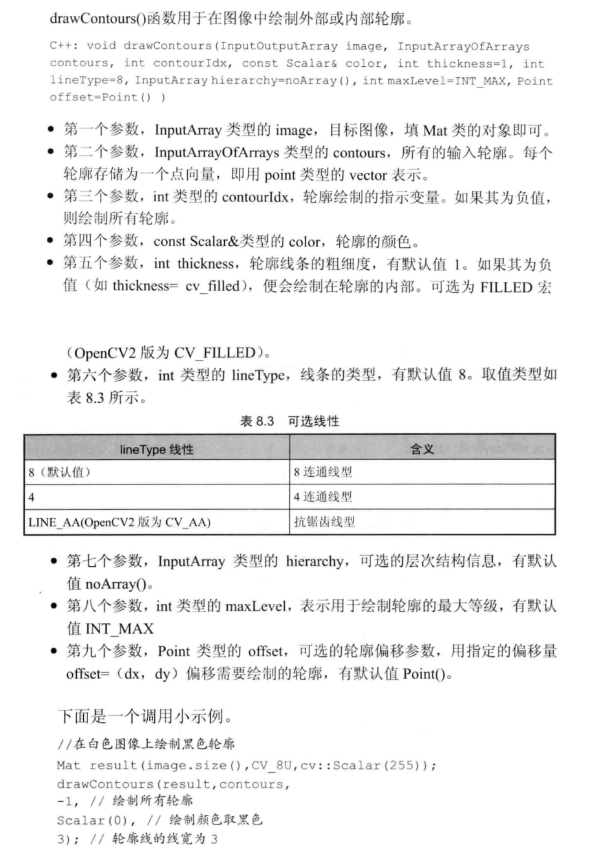
OpenCV函数:提取轮廓相关函数使用方法
opencv中提供findContours()函数来寻找图像中物体的轮廓,并结合drawContours()函数将找到的轮廓绘制出。首先看一下findContours(),opencv中提供了两种定义形式
官网:https://docs.opencv.org/3.3.1/d3/dc0/group__imgproc__shape.html#ga17ed9f5d79ae97bd4c7cf18403e1689a
void cv::findContours ( InputOutputArray image,
OutputArrayOfArrays contours,
OutputArray hierarchy,
int mode,
int method,
Point offset = Point()
)
#include "opencv2/highgui/highgui.hpp"
#include "opencv2/imgproc/imgproc.hpp"
#include <iostream>
#include <stdio.h>
#include <stdlib.h> using namespace cv;
using namespace std; Mat src; Mat src_gray;
int thresh = 100;
int max_thresh = 255;
RNG rng(12345); /// Function header
void thresh_callback(int, void*); /** @function main */
int main(int argc, char** argv)
{
/// 加载源图像
src = imread("E:\\VS2015Opencv\\vs2015\\project\\picture\\07.jpg", 1); /// 转成灰度并模糊化降噪
cvtColor(src, src_gray, CV_BGR2GRAY);
blur(src_gray, src_gray, Size(3, 3)); /// 创建窗体
char* source_window = "Source";
namedWindow(source_window, CV_WINDOW_AUTOSIZE);
imshow(source_window, src); createTrackbar(" Canny thresh:", "Source", &thresh, max_thresh, thresh_callback);
thresh_callback(0, 0); waitKey(0);
return(0);
} /** @function thresh_callback */
void thresh_callback(int, void*)
{
Mat canny_output;
vector<vector<Point> > contours;
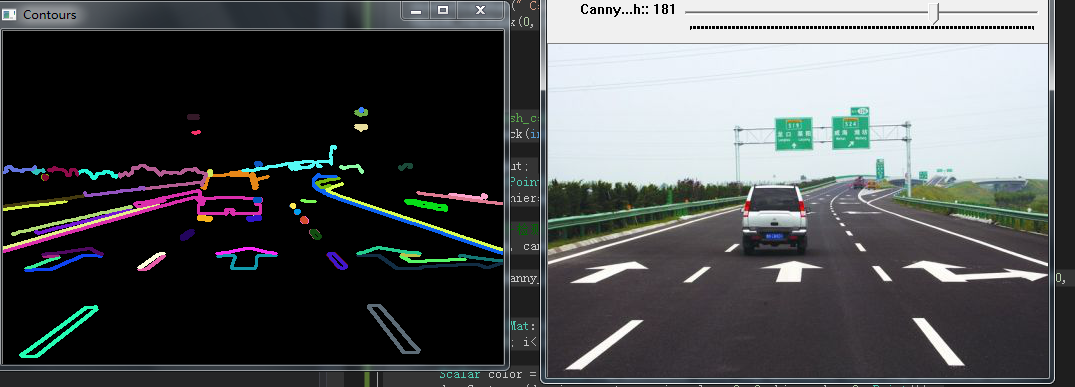
vector<Vec4i> hierarchy; /// 用Canny算子检测边缘
Canny(src_gray, canny_output, thresh, thresh * 2, 3);
/// 寻找轮廓
findContours(canny_output, contours, hierarchy, CV_RETR_TREE, CV_CHAIN_APPROX_SIMPLE, Point(0, 0)); /// 绘出轮廓
Mat drawing = Mat::zeros(canny_output.size(), CV_8UC3);
for (int i = 0; i< contours.size(); i++)
{
Scalar color = Scalar(rng.uniform(0, 255), rng.uniform(0, 255), rng.uniform(0, 255));
drawContours(drawing, contours, i, color, 2, 8, hierarchy, 0, Point());
} /// 在窗体中显示结果
namedWindow("Contours", CV_WINDOW_AUTOSIZE);
imshow("Contours", drawing);
}
OpenCV提取轮廓之后,还可以进行许多操作:
ArcLength() 计算轮廓长度
ContourArea() 计算轮廓区域的面积
BoundingRect() 轮廓的外包矩形
ConvexHull() 提取轮廓的凸包
IsContourConvex() 测试轮廓的凸性
MinAreaRect() 轮廓的最小外包矩形
MinEnclosingCircle() 轮廓的最小外包圆
fitEllipse() 用椭圆拟合二维点集
approxPolyDP() 逼近多边形曲线
boundingRect函数简介
boundingRect函数是用来计算轮廓的最小外接矩形,通常与findContours函数组合使用,findContours函数用来查找图像的轮廓,boundingRect获取轮廓的最小外接矩形!
Rect boundingRect( InputArray array );
(1) 第一个参数,InputArray array,一般为findContours函数查找的轮廓,包含轮廓的点集或者Mat;
(2) 返回值,Rect,返回值为最小外接矩形的Rect,即左上点与矩形的宽度和高度;
#include "opencv2/highgui/highgui.hpp"
#include "opencv2/imgproc/imgproc.hpp"
#include <iostream>
#include <stdio.h>
#include <stdlib.h> using namespace cv;
using namespace std; Mat src; Mat src_gray;
int thresh = 100;
int max_thresh = 255;
RNG rng(12345); /// 函数声明
void thresh_callback(int, void*); /** @主函数 */
int main(int argc, char** argv)
{
/// 载入原图像, 返回3通道图像
src = imread("E:\\VS2015Opencv\\vs2015\\project\\picture\\1.1.jpg", 1); /// 转化成灰度图像并进行平滑
cvtColor(src, src_gray, CV_BGR2GRAY);
blur(src_gray, src_gray, Size(3, 3)); /// 创建窗口
char* source_window = "Source";
namedWindow(source_window, CV_WINDOW_AUTOSIZE);
imshow(source_window, src); createTrackbar(" Threshold:", "Source", &thresh, max_thresh, thresh_callback);
thresh_callback(0, 0); waitKey(0);
return(0);
} /** @thresh_callback 函数 */
void thresh_callback(int, void*)
{
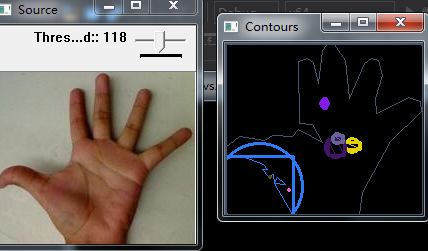
Mat threshold_output;
vector<vector<Point> > contours;
vector<Vec4i> hierarchy; /// 使用Threshold检测边缘
threshold(src_gray, threshold_output, thresh, 255, THRESH_BINARY);
/// 找到轮廓
findContours(threshold_output, contours, hierarchy, CV_RETR_TREE, CV_CHAIN_APPROX_SIMPLE, Point(0, 0)); /// 多边形逼近轮廓 + 获取矩形和圆形边界框
vector<vector<Point> > contours_poly(contours.size());
vector<Rect> boundRect(contours.size());
vector<Point2f>center(contours.size());
vector<float>radius(contours.size()); for (int i = 0; i < contours.size(); i++)
{
approxPolyDP(Mat(contours[i]), contours_poly[i], 3, true);
boundRect[i] = boundingRect(Mat(contours_poly[i]));
minEnclosingCircle(contours_poly[i], center[i], radius[i]);
} /// 画多边形轮廓 + 包围的矩形框 + 圆形框
Mat drawing = Mat::zeros(threshold_output.size(), CV_8UC3);
for (int i = 0; i< contours.size(); i++)
{
Scalar color = Scalar(rng.uniform(0, 255), rng.uniform(0, 255), rng.uniform(0, 255));
drawContours(drawing, contours_poly, i, color, 1, 8, vector<Vec4i>(), 0, Point());
rectangle(drawing, boundRect[i].tl(), boundRect[i].br(), color, 2, 8, 0);
circle(drawing, center[i], (int)radius[i], color, 2, 8, 0);
} /// 显示在一个窗口
namedWindow("Contours", CV_WINDOW_AUTOSIZE);
imshow("Contours", drawing);
}
minAreaRect()
作用:找到一个能包围输入二维点集的面积最小的任意方向矩形。
形式:minAreaRect(InputArray points);
参数:points:输入二维点集,并用std::vector or Mat存储;
fitEllipse()
作用:寻找一个适合的围绕二维点集的椭圆。
形式:fitEllipse(InputArray points);
参数:points:输入二维点集,并用std::vector or Mat存储;
ellipse()
作用:画一个简单的或明显的椭圆弧,或填充一个椭圆部分。
形式:void ellipse(Mat& img, const RotatedRect& box, const Scalar& color, int thickness=1, int lineType=8);
或void ellipse(Mat& img, Point center, Size axes, double angle, double startAngle, double endAngle, const Scalar& color, int thickness=1, int lineType=8, int shift=0);
参数:
img:输入的图像;
box:通过RotatedRect or CvBox2D选择椭圆代表,也就是在任意方向矩阵中镶嵌一个椭圆;
后边三个参数分别是:颜色、边线粗细、边线的类型;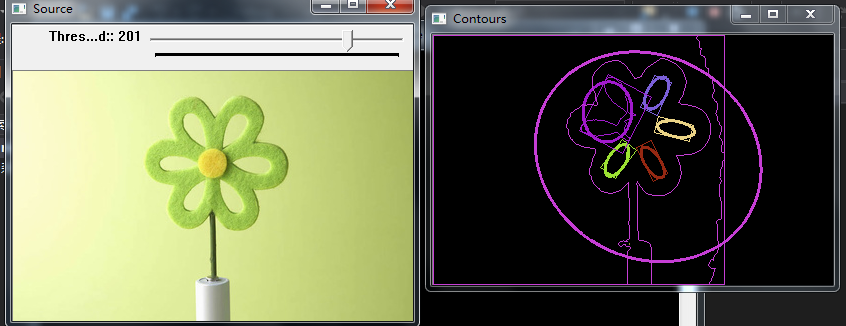
#include "opencv2/highgui/highgui.hpp"
#include "opencv2/imgproc/imgproc.hpp"
#include <iostream>
#include <stdio.h>
#include <stdlib.h> using namespace cv;
using namespace std; Mat src; Mat src_gray;
int thresh = ;
int max_thresh = ;
RNG rng(); /// Function header
void thresh_callback(int, void*); /** @function main */
int main(int argc, char** argv)
{
/// 加载源图像
src = imread("E:\\VS2015Opencv\\vs2015\\project\\picture\\01.jpg"); /// 转为灰度图并模糊化
cvtColor(src, src_gray, CV_BGR2GRAY);
blur(src_gray, src_gray, Size(, )); /// 创建窗体
char* source_window = "Source";
namedWindow(source_window, CV_WINDOW_AUTOSIZE);
imshow(source_window, src); createTrackbar(" Threshold:", "Source", &thresh, max_thresh, thresh_callback);
thresh_callback(, ); waitKey();
return();
} /** @function thresh_callback */
void thresh_callback(int, void*)
{
Mat threshold_output;
vector<vector<Point> > contours;
vector<Vec4i> hierarchy; /// 阈值化检测边界
threshold(src_gray, threshold_output, thresh, , THRESH_BINARY);
/// 寻找轮廓
findContours(threshold_output, contours, hierarchy, CV_RETR_TREE, CV_CHAIN_APPROX_SIMPLE, Point(, )); /// 对每个找到的轮廓创建可倾斜的边界框和椭圆
vector<RotatedRect> minRect(contours.size());
vector<RotatedRect> minEllipse(contours.size()); for (int i = ; i < contours.size(); i++)
{
minRect[i] = minAreaRect(Mat(contours[i]));
if (contours[i].size() > )
{
minEllipse[i] = fitEllipse(Mat(contours[i]));
}
} /// 绘出轮廓及其可倾斜的边界框和边界椭圆
Mat drawing = Mat::zeros(threshold_output.size(), CV_8UC3);
for (int i = ; i < contours.size(); i++)
{
Scalar color = Scalar(rng.uniform(, ), rng.uniform(, ), rng.uniform(, ));
// contour
drawContours(drawing, contours, i, color, , , vector<Vec4i>(), , Point());
// ellipse
ellipse(drawing, minEllipse[i], color, , );
// rotated rectangle
Point2f rect_points[]; minRect[i].points(rect_points);
for (int j = ; j < ; j++)
line(drawing, rect_points[j], rect_points[(j + ) % ], color, , );
} /// 结果在窗体中显示
namedWindow("Contours", CV_WINDOW_AUTOSIZE);
imshow("Contours", drawing);
}
最新文章
- 五、基于hadoop的nginx访问日志分析--userAgent和spider
- JQ下的常见插件
- [Unity2D]游戏引擎介绍
- bzoj 4237稻草人
- Cesium简介
- RMAN-使用catalog恢复目录进行备份与恢复
- insert into table1 (column1,column2) select column1,column2 from table2 where 条件
- 松瀚SN8P2711 2722 ADC初始化程序及应用--汇编源码
- 查看mms UA/profile
- 微信公众号tp3.2放进Model无效,几种实例化的方法试过,还是提示无法提供服务
- Dicom文件转mhd,raw文件格式
- C++学习笔记52:查找
- JavaScript实现全屏显示
- sublim 配置 用户默认绑定的格式化文本快捷键
- Java,第16天,属性与方法;
- python矩阵水平镜像
- QT 用listveiw显示图片
- Lua程序设计(一)面向对象概念介绍
- cocos2d-x retain和release倒底怎么玩?
- Ubuntu 使用命令更新 Ubuntu 系统