Cartographer源码阅读(3):程序逻辑结构
2024-08-21 18:02:45
Cartographer早期的代码在进行3d制图的时候使用了UKF方法,查看现有的tag版本,可以转到0.1.0和0.2.0查看,包含kalman_filter文件夹。
文件夹中的pose_tracker类文件在mapping_3d的文件加下有kalman_local_trajectory_builder。目前这部分代码已经移除,整个代码的结构也发生了较大变动。
项目的主要逻辑结构:https://google-cartographer.readthedocs.io/en/latest/
当前项目主要的内容:惯导追踪ImuTracker、位姿估算PoseExtrapolator、自适应体素滤波AdaptiveVoxelFilter、扫描匹配、子图构建、闭环检测和图优化。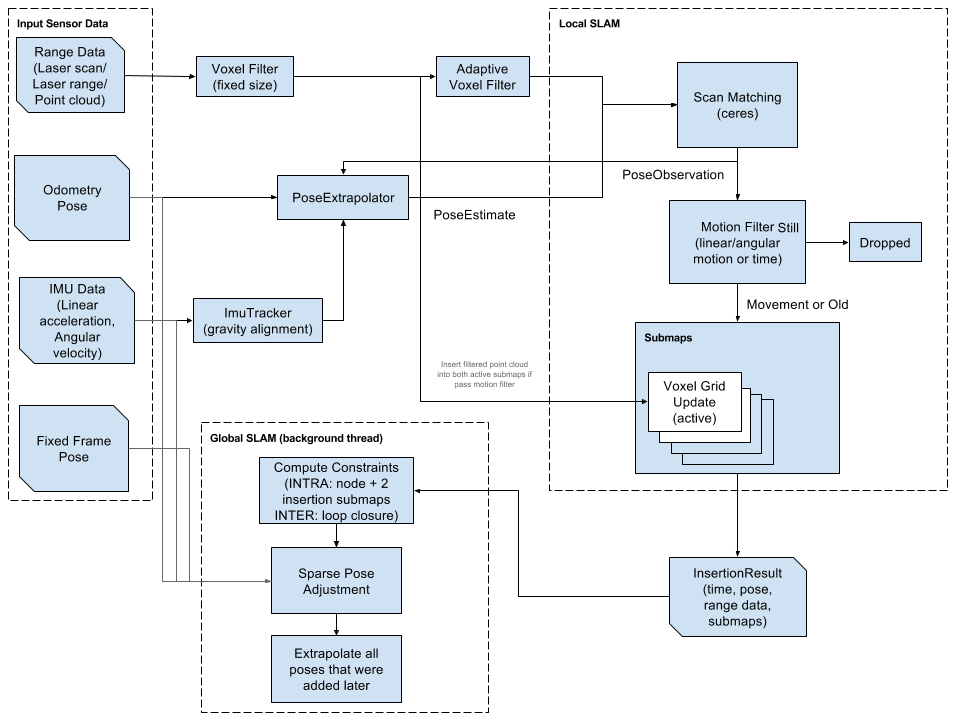
当前主要采用互相关分析方法进行扫描匹配。
最新文章
- 使用jenkins配置.net mvc网站进行持续集成二
- UIView中间透明周围半透明(四种方法)
- [EWS]在exchange中的标识符
- UESTC 887 方伯伯的儿童节 --树形DP
- linux环境下安装sphinx中文支持分词搜索(coreseek+mmseg)
- Neutron LBaaS Service(1)—— Neutron LBaaS Service基本知识
- 条款20 STL函数对象
- innodb master thread 工作原理
- maven配置信息查询
- css的小demo
- 事务管理在三层架构中应用以及使用ThreadLocal再次重构
- android手机状态解释,比方android.os.Build.VERSION.SDK
- Create and test an approval workflow with Microsoft Flow
- 第 8 章 容器网络 - 065 - 容器在 Weave 中如何通信和隔离?
- 安装SourceTree工具,无需注册就可以正常使用SourceTree
- Android学习之基础知识八—Android广播机制实践(实现强制下线功能)
- java int and Integer
- [国际A类会议] 2018最最最顶级的人工智能国际峰会汇总!CCF推荐!
- redis在PHP中的基本使用案例(觉得比较实用)
- (转)在 CentOS7 上安装 MongoDB