ROS-OPENCV
2024-08-31 09:14:31
前言:opencv是一个开源的跨平台计算机视觉库。
前提:1.已下载并编译了相关功能包集,如还未下载,可通过git下载:https://github.com/huchunxu/ros_exploring.git
2.安装了usb摄像头驱动,如还未安装,可参考:https://www.cnblogs.com/chendeqiang/p/10217099.html
一、安装opencv
sudo apt-get install ros-kinetic-vision-opencv libopencv-dev python-opencv
二、在ROS中使用opencv
cv_bridge是一种图片格式转换的中间商,可以将ros中的图像格式转化为opencv中的格式。
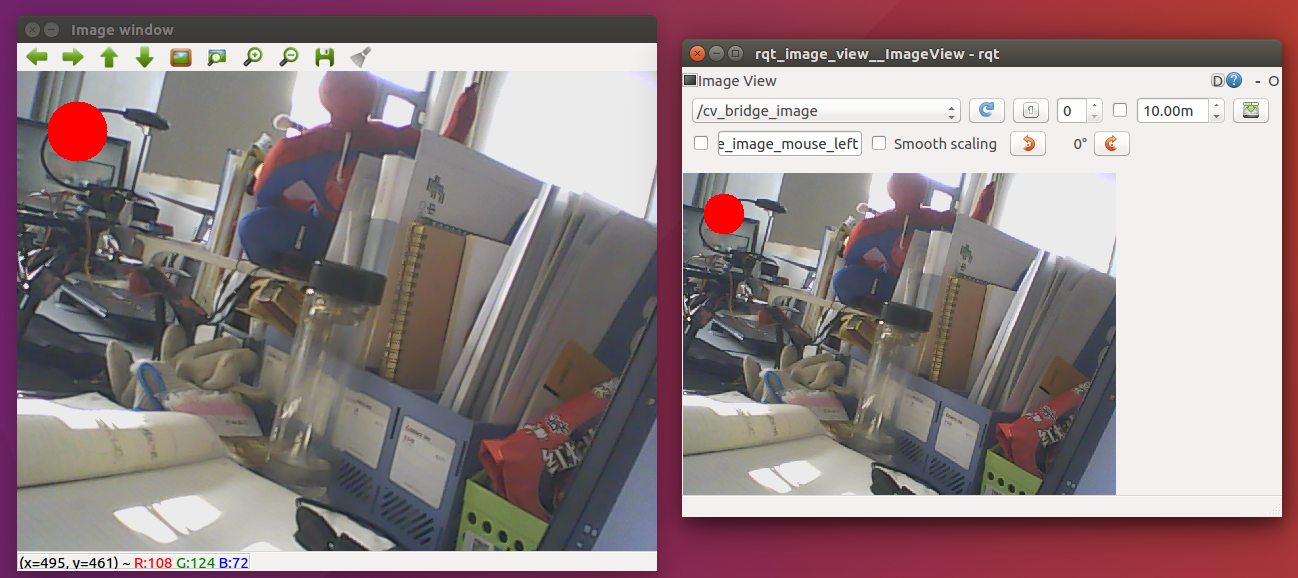
演示内容:从摄像头获取图像,转化成opencv格式显示,再转化成ros图像格式显示。
2.1 单独编译<<ROS机器人开发实践>> /robot_perception/robot_vision功能包
2.2 启动例程
roslaunch robot_vision usb_cam.launch rosrun robot_vision cv_bridge_test.py rqt_image_view
--------------------------------
效果如下:
-END-
最新文章
- mac pods 安装
- C和指针 第十四章 习题
- 如何解决火狐FF里Input标签刷新页面后 仍然保存之前输入的内容的方法。
- 在“BindingNavigator”删除数据前弹出确认框的实现
- c while 循环
- wind7下搭建ftp服务器
- MVC 自定义错误处理
- iOS的推送机制APNs:本地推送&远程推送
- lint使用简介
- Dynamics 365-关于Solution的那些事(一)
- Java作业:第二次过程性考核 ——长春职业技术学院 16级网络工程
- SSD硬盘安装win10 且安装千牛工作台频繁卡死问题解决过程
- 18个分形图形的GIF动画演示
- Linux下路由配置梳理
- 菜鸟如何使用hanlp做分词的过程记录
- PAT甲题题解-1117. Eddington Number(25)-(大么个大水题~)
- CMD运行后关闭CMD 的窗口命令
- Almost Acyclic Graph CodeForces - 915D (思维,图论)
- struts2 action result type类型
- 第一个JavaScript代码