无人驾驶车辆路径跟踪的增量式PID控制
2024-09-07 18:18:23
路径跟踪是无人车研究方向的一项关键技术。路径跟踪控制算法是指能够使无人车按照预设路径,安全稳定行驶的控制方法。
建立无人车路径跟踪模型
预设无人车在A、B两点间,当前位置为D点,航向为hF
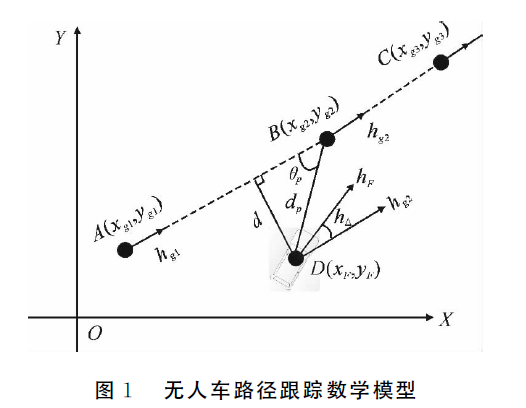
可以得到BD的距离dp ;D到AB的垂线段距离d;夹角θp的值;航向角差h△=hf-hg2;
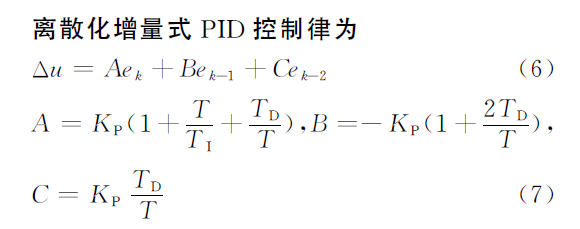
允许的误差范围为0.2m,在误差范围内和误差范围外的控制策略是不同的
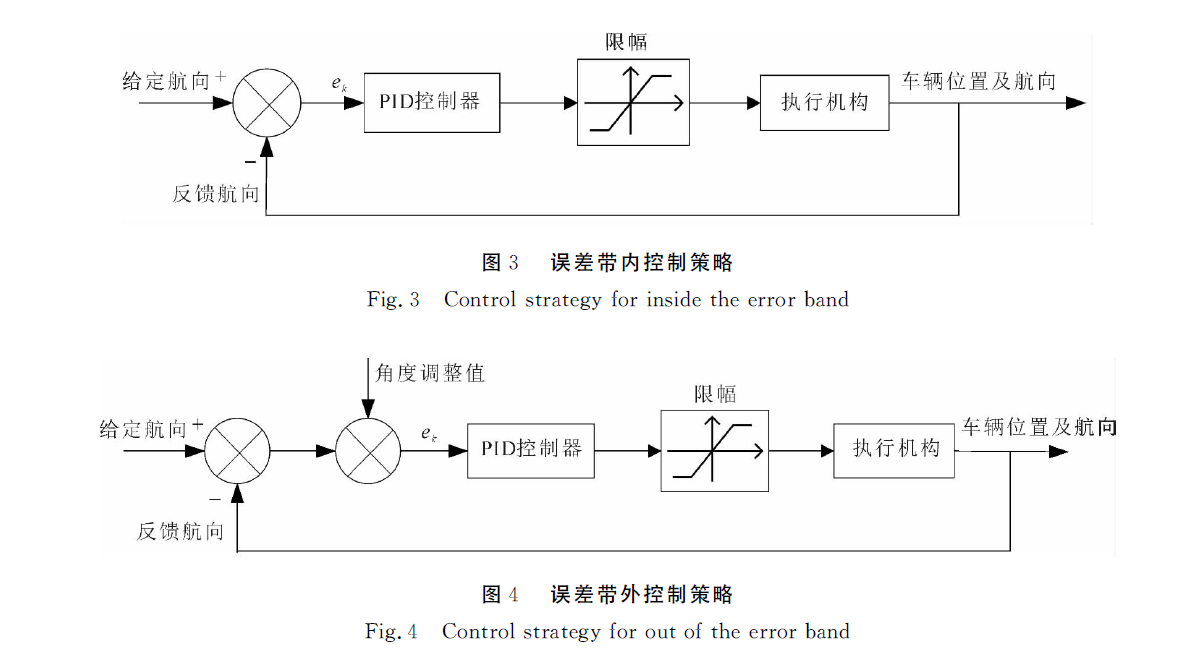
ek为航向给定量rk和反馈量ck的差值,控制器PID的输入量,δ为角度调整值
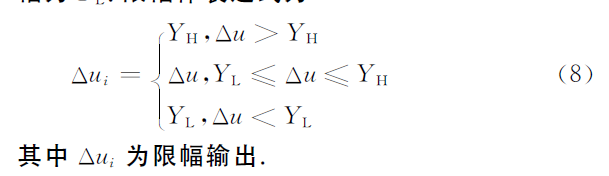
△u为控制器输出,Kp为比例系数,TI、TD分别为积分和微分时间,KI=1/TI;KD=TD;KI、KD分别为积分系数和微分系数
在PID算法中引入积分环节的主要目的是为了减小系统静差,提高系统的控制精度。
微分系数的引入主要是为了改善闭环系统的稳定性和动态响应速度,这是由于微分系统主要影响系统误差变化速率。
由于PID控制器输出是方向盘转角,车辆方向不会瞬时改变太大,因此对其采取限幅措施,得到限幅输出。即方向盘转角每次最多变化的角度。
控制算法的步骤:
1、计算ek的值:若车在误差带内,ek=rk-ck;若车在误差带外,ek=rk-ck-δ
2、确定积分系数:若ek的值大于ξ时,KI=0;若ek的值小于ξ时,KI等于设定值
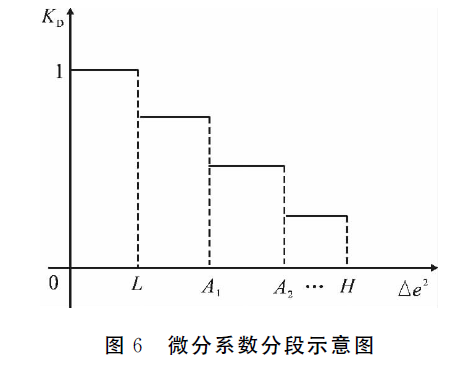
3、确定微分系数:定义误差变动量的平方值为Δe2=(ek -ek-1)2;KD的值由微分系数分段图得到
4、计算控制器输出△u,确定限幅输出
最新文章
- BZOJ 1305: [CQOI2009]dance跳舞 二分+最大流
- Atitit.常见软件 数据 交换格式 标准
- JDK1.6 中文API 下载地址
- 使用 HTML5 input 类型提升移动端输入体验
- listView获取item的Edit内容,listView中的edit内容在滚动时自动赋值了前面的内容
- Centos下使用Heartbeat实现集群[转]
- HDU 4746 (莫比乌斯反演) Mophues
- 禁止选择文本和禁用右键 v1.0
- Spring再学习
- 基于SQLite日志记录工具--Log4W
- 【学习笔记】python
- 佳鑫:信息流广告CTR一样高,哪条文案转化率更好?
- centos6.5环境wget报错Unable to establish SSL connection
- 软概(lesson 2):课堂测试
- 项目出现小红叉,类名上带有 Implicit错误
- 让AngularJS的controllers之间共享数据
- Ignite集群管理——基于静态IP的节点发现
- Winform appconfig修改后的更新问题
- CecOS Virtualization
- JS 匿名函数或自执行函数总结