ROS开源小车TurtleBot3详情介绍
2024-10-07 14:45:05
您为什么要选择ROS开源智能小车
ROS(Robot Operating System,机器人操作系统)是目前世界上更主流更多人使用的的机器人开源操作系统。它可以提供操作系统应有的服务,包括硬件抽象,底层设备控制,常用函数的实现,进程间消息传递,以及包管理;也提供用于获取、编译、编写、和跨计算机运行代码所需的工具和库函数。它是用于编写机器人软件程序的一种具有高度灵活性的软件架构,为机器人研究和开发提供代码复用的支持。 ROS也支持一种类似于代码储存库的联合系统,这个系统也可以实现工程的协作及发布。从驱动程序到最新算法再到强大的开发人员工具,ROS的首要目标是提供一套统一的开源程序框架,用以在多样化的现实世界与仿真环境中实现对机器人的控制。
![]()
ROS具有丰富的机器人开发软件功能包和软件工具,可以提高机器人研发中软件复用率,加快项目进度,用最少的代码实现更多的复杂功能。越来越多的机器人基于ROS开发,已经成为机器人领域的事实标准。ROS已经成为目前开发机器人和人工智能的最得力助手和最稳定装备。
![]()
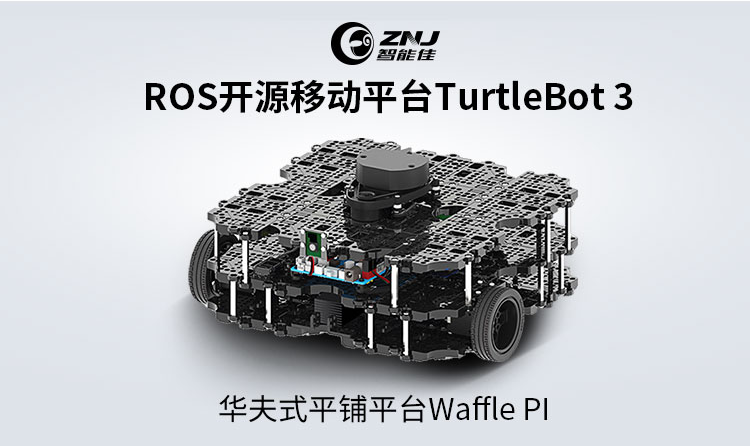
Waffle Pi这是一款软件和硬件双开源的小型化ROS移动平台,采用模块化设计,配有多种先进的传感器,适合用于ROS教学、科学研究、多机器人协作,以及机器人爱好者的产品原型设计等。该平台也是ROS官方合作平台。
![]()
![]()
产品结构与尺寸

![]()
主要功能:
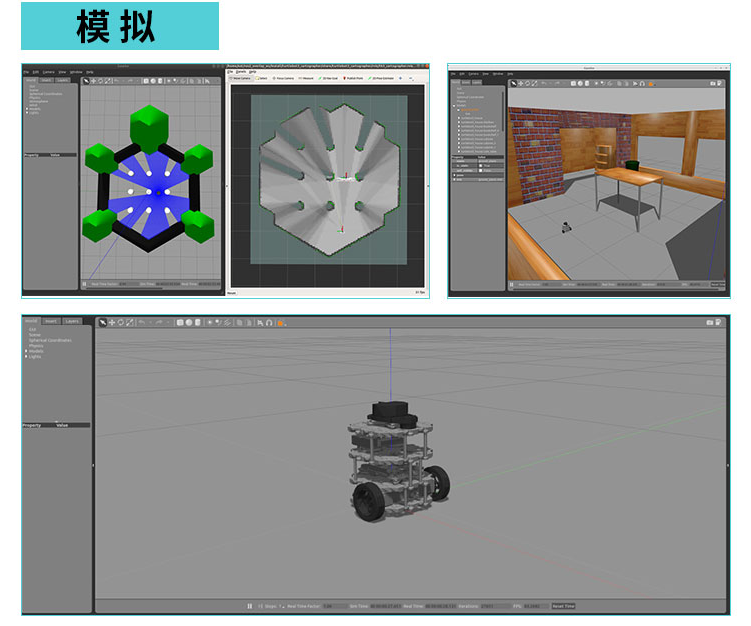
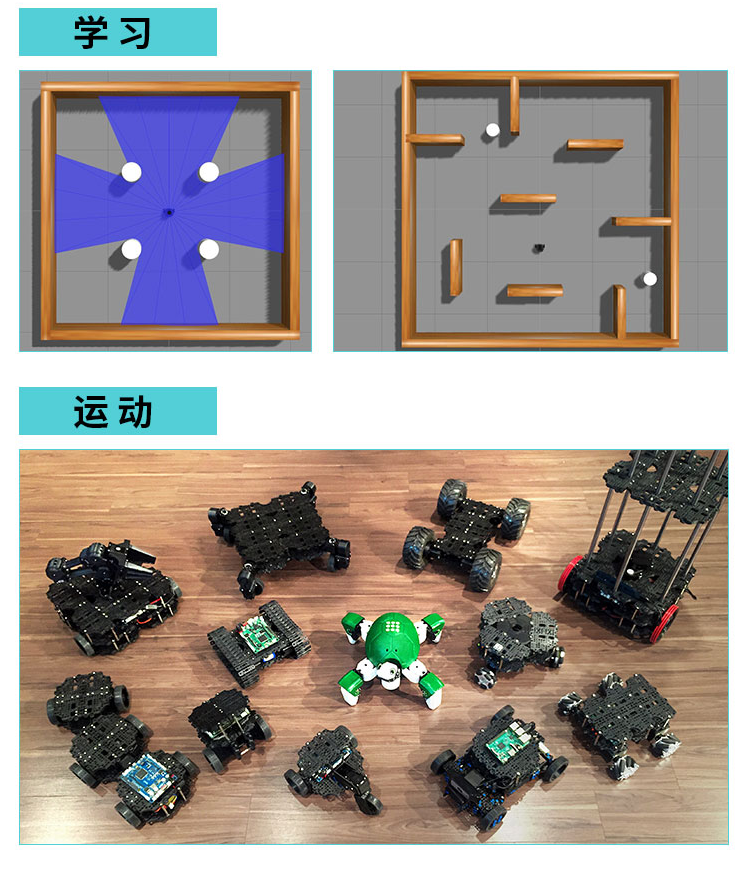
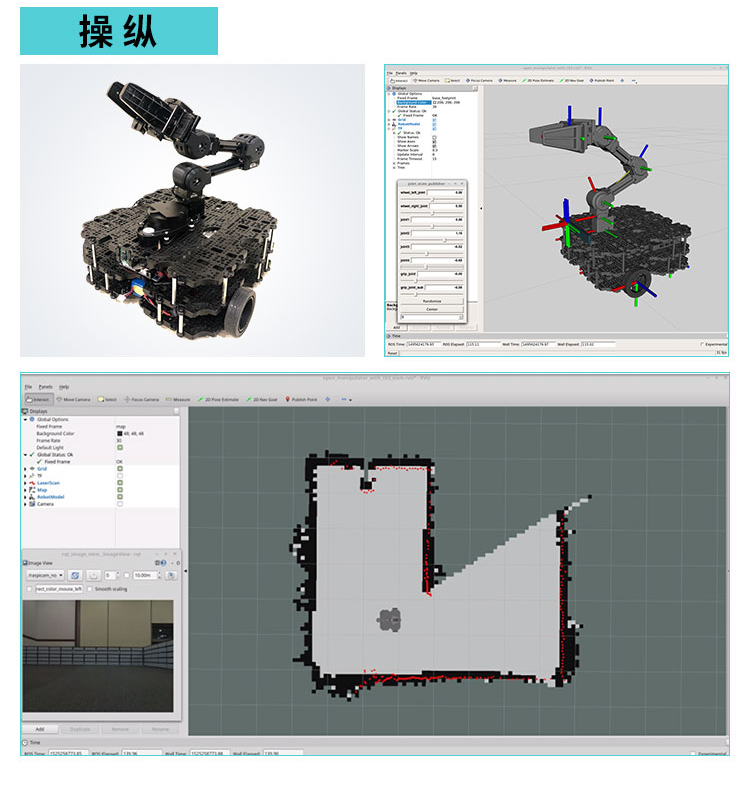
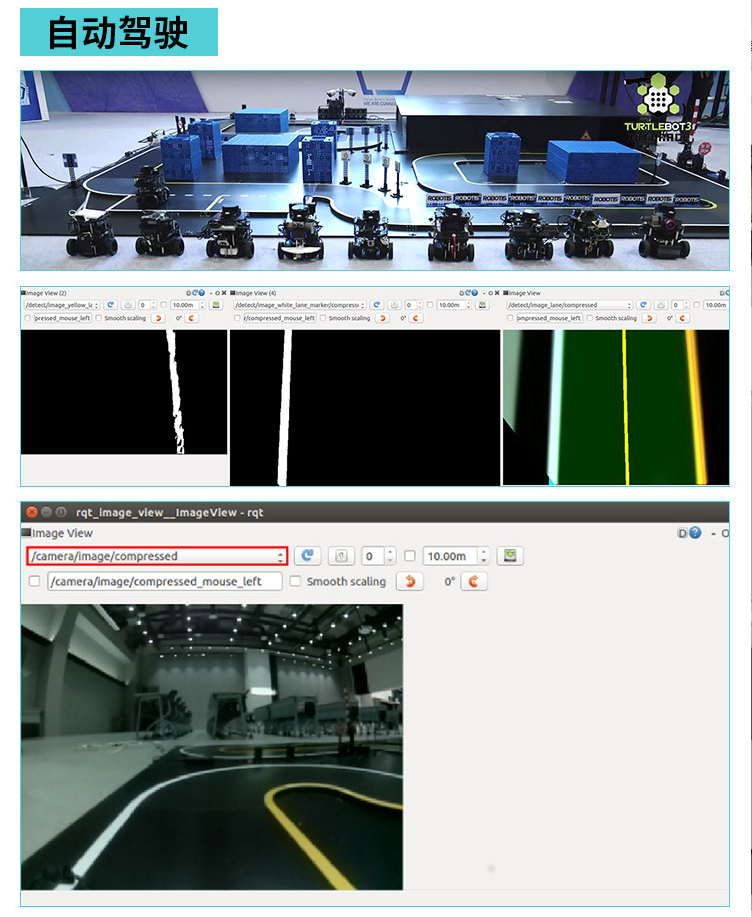
自主导航、SLAM建图、模拟、学习、运动、操纵、自动驾驶、

![]()

![]()
![]()
![]()
![]()
![]()
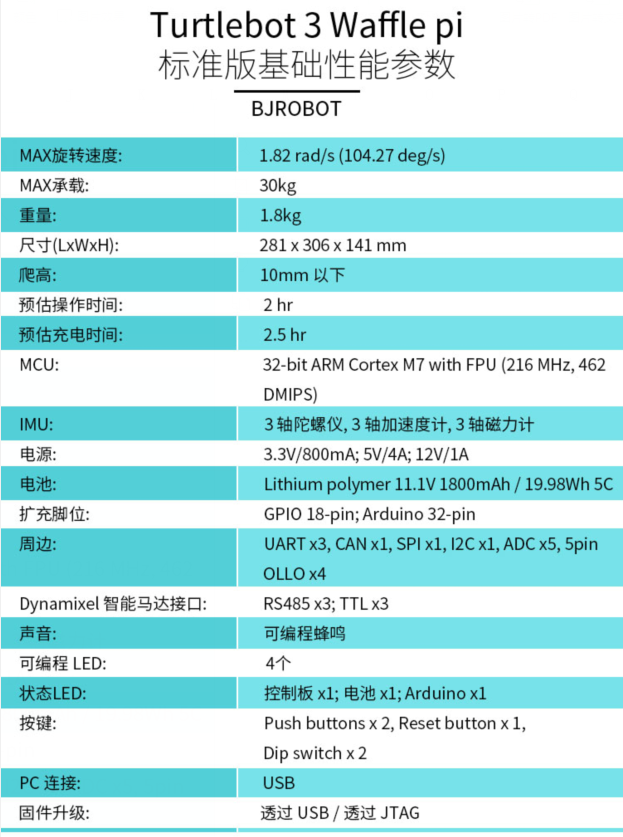
TurtleBot3 Waffle pi标准版基础性能参数:
![]()
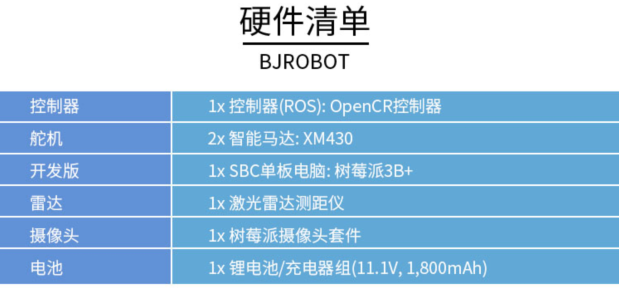
TurtleBot3 Waffle pi标准版 硬件清单:
![]()
针对不同的需求定制了如下定制版本:

![]()
实物展示图:

![]()

![]()

![]()

![]()
最新文章
- 使用google 语言 api 来实现整个网站的翻译
- hdu Hike on a Graph
- oracle 触发器实现主键自增
- Android notifications通知栏的使用
- 最简单的耗时组件(窗口activity里面放一个progressBar)
- "file:///" file 协议
- ICMP and InetAddress.isReachable()
- HDU 4635 多校第四场 1004 强联通
- Ubuntu 14.04 64位安装Android Studio 和 genymotion (上)
- 凯恩斯主义VS货币主义
- 射频识别技术漫谈(29)——射频接口芯片TRF7960
- 用ATL开发和部署ActiveX网页控件
- 【c++】指针参数是如何传递内存的
- [LeetCode] Toeplitz Matrix 托普利兹矩阵
- mock打桩之EasyMock
- 一类SG函数递推性质的深入分析——2018ACM陕西邀请赛H题
- PHP全栈学习笔记6
- Windows API 调用示例
- scrapy 断点续爬
- 命令行翻译 推荐一个linux系统中可用的终端小程序